

6. Расчет числа зубьев зубчатых колес всех передач

Основная группа (рис. 3)
Для данной группы составляем следующие уравнения:
Z4+ Z5 = Z6+ Z7 ; ( 1 )
Z8+ Z9 = Z6+ Z7 ; ( 2 )

Для решения этой неопределенной системы уравнений и для получения наименьших размеров колес задаемся числом зубьев наименьшего колеса группы Z4 = Zmin = 1822.
Принимаем Z4=21.
Из уравнения (3) получаем: Z5= 2,52 · Z4= 2,52·21 = 52,9 53
Из уравнений (1) и (4) получаем:
21+53 = Z6+2·Z6 и Z6= 74/3 = 24,67 25
Из уравнения (4) имеем: Z7=2·Z6=2·24,67 = 49,33 49
Однако определенные значения Z6 и Z7 вызовут большое отклонение в передаточном отношении i3 (25/49= 0,51 вместо требуемого 0,50). Поэтому сумму зубьев этих колес примем равной Z6 + Z7= 75. Тогда
Z6= 75/3 = 25 и Z7= 2·Z6=2·25 = 50.
Сумму зубьев колес Z8 и Z9 принимаем также равной 75. Из уравнений (2) и (5) получаем
Z8+1,58·Z8= 75 и Z8=75/2,58=29,1 29.
Из уравнения (5) получаем Z9=1,58·Z8=1,58·29,1=45,9 46.
Проверка: Z4+ Z5= Z6+ Z7= Z8+ Z9
21+53=74 25+50=29+46=75.
Передачу Z4- Z5 корригируем с положительными коэффициентами коррекции, что особенно целесообразно для колеса Z4= 21.
Числа зубьев других переборных групп рассчитываем аналогично. Группы можно именовать в кинематическом порядке (основная, 1-ая переборная и т. д.) или в конструктивном порядке (1-ая, 2-ая, 3-я и т. д.).
Для получения достаточно точных требуемых передаточных отношений передач можно использовать подбор величины или корригирование передач.
Для получения точных общих передаточных отношений привода целесообразно так округлять полученные значения чисел зубьев колес, чтобы в одной группе передач фактические передаточные отношения были равны или больше требуемых, во второй группе – равны или меньше требуемых и т. д.
7. Определение фактических чисел оборотов шпинделя
Выбирая включенные передачи по графику чисел оборотов, получаем следующие фактические числа оборотов шпинделя:

8. Определение отклонения фактических чисел оборотов от стандартных
[Δn] = ± 10 (φ-1)% = 10(1,26-1)% = ± 2.6% .
Отклонения равны:

Все отклонения фактических чисел оборотов меньше допустимых отклонений.
В дальнейших расчетах будем принимать во внимание только стандартные заданные числа оборотов шпинделя.
9. Составление кинематической схемы привода
При составлении кинематической схемы необходимо учитывать следующее:
1) число валов должно соответствовать графику чисел оборотов;
2) расположение валов должно соответствовать конструкции станка, в частности конструктивной форме корпуса привода, валы могут располагаться горизонтально или вертикально в соответствии с расположением шпинделя в станке;
3) передвижные зубчатые колеса собирают в блоки различной конструкции. Блоки обычно состоят из двух или трех колес. Вместо блока из четырех колес применяют для уменьшения осевых габаритов группы два двойных блока. Меньшие осевые размеры имеют группы колес, подвижные блоки которых имеют узкое исполнение, то есть блоки, составленные из рядом расположенных колес;
4) расположение групп колес должно быть таким, чтобы общая длина валов и длина участков валов, передающих крутящий момент, в особенности тяжело нагруженных (у шпинделя) была возможно малой;
5) в металлорежущих станках обычно наиболее нагруженные передачи группы (с малым ведущим колесом) располагают у подшипника вала. Для обеспечения распределения передаваемой нагрузки по всей длине зубьев колес, валы долины быть достаточно жесткими, а зубчатые венцы иметь ширину не более, чем это требуется по расчету на прочность.
На рис. 4 приведен 1-й вариант кинематической схемы привода. Этот вариант характеризуется тем, что все блоки колес являются ведущими, их размеры и вес поэтому относительно небольшие. Группы колес не имеют общих связанных колес. Но конструкция валов III и IV при выполнении привода по этой схеме будет сложной, так как на этих валах будут располагаться подвижные блоки колес и неподвижно закрепленные колеса, что требует применения разных посадок. Блоки колес по этому варианту имею узкое исполнение, что уменьшает осевые габариты групп и величины перемещений блоков.

Рис. 4. Кинематическая схема (вариант 1)
На рис. 5 приведен 2-ой вариант кинематической схемы. Этот вариант характеризуется тем, что на валу III расположены только неподвижные колеса, а на валу IV расположены только подвижные блоки колес. Учитывая, что колеса 9 и 14 имеют одно и то же число зубьев и могут иметь один модуль, они объединены в одно связанное колесо. Таким образом число колес в приводе уменьшается на одно колесо. Конструкции валов III и IV проще конструкций этих же валов при использовании 1-го варианта схемы. Однако конструкция блока колес 4-6-8 стала более сложной, а блок колес 11-13-15 будет иметь больший вес, чем вес блошка колес 10-12-14 (см. 1-й вариант). Несмотря на применение связанного колеса осевые размеры групп передач, расположенных между валами III и IV, несколько увеличились. Из-за применения одного и того же модуля в группах могут возрасти и диаметральные размеры основной группы.
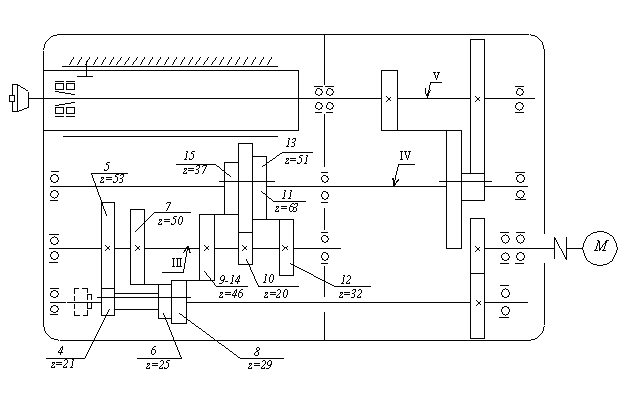
Рис. 5. Кинематическая схема (вариант 2)
Практически варианты конструктивно равноценны. Оба варианта используются в различных металлорежущих станках.
Для дальнейшего рассмотрения остановимся на 1-ом варианте, как более простом.