

управление тех. системами / ТАУ
.pdf
|
|
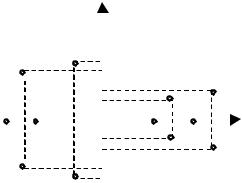
Управляющее воздействие является суммой двух |
||||||||||||||
φ |
|
составляющих: |
|
пропорциональной |
|
|
(наклонная |
|||||||||
|
штриховка |
на |
рис. |
28) |
и |
дифференциальной |
||||||||||
|
|
|||||||||||||||
|
|
(вертикальная |
штриховка). |
|
Последняя |
имеет |
||||||||||
|
|
постоянное |
|
|
|
|
|
|
значение |
|
|
|
при |
|||
|
t |
неизменной |
скорости |
|
|
изменения |
управляемого |
|||||||||
|
параметра и обращается в |
|
|
|
|
|
|
|
|
|||||||
- ξ |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Рис. 28 |
|
|
|
|
|
|
|
|
|
|||
|
|
ноль при его постоянной величине. При |
||||||||||||||
|
|
установившемся |
|
|
режиме |
|
дифференциальная |
|||||||||
|
t |
установившемся |
|
|
режиме |
|
дифференциальная |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
составляющая равна нулю, и любой постоянной |
||||||||||||||
|
|
нагрузке |
соответствует |
|
определенная |
|
величина |
|||||||||
управляемого параметра. Для получения такого закона управления необходимо в |
||||||||||||||||
измерительное устройство системы управления ввести дифференцирующее звено, |
||||||||||||||||
включенное параллельно основной (пропорциональной) части. Аналогичного |
||||||||||||||||
результата можно достичь, подавая на вход исполнительной части системы величину, |
||||||||||||||||
пропорциональную производной управляемого параметра (например, параметр |
||||||||||||||||
нагрузки). Такое управляющее устройство называют двухимпульсным. Рассмотренный |
||||||||||||||||
закон управления обеспечивает устойчивость системы, ее быстродействие, но не |
||||||||||||||||
допускает работу с нулевой неравномерностью. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пропорционально-дифференциально-интегральный закон управления в |
||||||||||||||||
|
|
соответствии с формулой |
|
|
|
сочетает |
||||||||||
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
t |
|
|
|
d |
|
|
|
|
|
|
|
|
|
dt Т |
|
|||||||
|
|
|
k |
p |
|
|
д |
|
|
|||||||
|
|
|
|
|
|
|
|
|
Т и |
|
|
dt |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
достоинства |
всех |
вышеперечисленных |
||
|
|
|
|
|
|
t |
законов, |
то |
есть позволяет |
осуществить |
|
- ξ |
устойчиво |
работающую |
систему управления, |
||||||||
|
|
|
|
|
|
|
обеспечивающую нулевую неравномерность |
||||
|
|
|
|
|
|
|
на установившихся режимах и одновременно |
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
высокое качество управления в динамике, то |
||||
|
|
|
|
|
|
|
есть небольшое время переходного процесса и |
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
минимальные |
динамические |
отклонения |
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
t |
управляемого параметра. |
|
|
||
|
|
|
|
|
|
Графически |
величина |
управляющего |
|||
|
|
|
|
|
|
|
|||||
воздействия ξ при изменении управляемого параметра φ показана сплошной линией на рис.
29.Дифференциальная составляющая
(горизонтальная штриховка) существует только на участке нарастания управляемого параметра. Пропорциональная составляющая (наклонная штриховка) изменяется в соответствии с изменением φ. Равновесный режим восстанавливается при Δφ = 0 и ξ
= λ.
Для реализации такого сложного закона управления требуется, чтобы на вход исполнительного устройства системы управления подавалась сумма параметров, соответствующих управляемому параметру, его производной и интегралу. Наиболее просто это осуществляется в электронных регуляторах, где операции дифференцирования и интегрирования выполняются с помощью электронных схем или микропроцессоров. В этом случае предусматривается настройка постоянных интегрирования и дифференцирования, что позволяет подбирать необходимый закон изменения управляющего воздействия применительно к требованиям конкретной установки.

Устройства, создаваемые на основе пересиленных законов управления, обычно называют регуляторами. В название регулятора вводится сокращенное обозначение закона управления, например, П-регулятор, ПД-регулятор и т.д.
6. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ
Статические и динамические свойства системы управления определяются решением дифференциального уравнения (3.4). Для линейной системы при ступенчатом изменении входного параметра (нагрузки или управляющего воздействия) это решение сводится к (4.1). Первое слагаемое В(0)/А(0) получаем подстановкой нуля вместо р в числитель и знаменатель передаточной функции системы W(p). Эта величина не зависит от времени и представляет собой новое установившееся значение управляемого параметра. При нулевых начальных условиях (а именно такими полагаются начальные условия при выводе передаточной функции) и изменении входного параметра от 0 до 1 это будет соответствовать степени неравномерности системы δ. Этот параметр называют также статической ошибкой или статической погрешностью системы управления. Последующие слагаемые в формуле (4.1) представляют собой функции времени, которые в совокупности образуют переходный процесс. Для каждого момента времени их сумма образует величину φпер (рис. 30). От характера изменения и численных значений функции φпер (t) зависят такие жизненно важные для практики
параметры системы управления, как ее устойчивость, величина динамических "забросов" управляемого параметра и длительность переходного процесса.
6.1. Устойчивость системы автоматического
управления
Как показано в разделе 4 (формула 4.1), переходная
характеристика представляет собой сумму, в которой каждое из слагаемых
является функцией времени, протекание которой определяется одним из корней характеристического уравнения А(р) = 0. Понятие устойчивости системы в строгой формулировке достаточно сложно и громоздко. С практической точки зрения устойчивой можно считать систему, которая, будучи выведена из равновесия, восстанавливает исходный установившийся режим или переходит к новому равновесному режиму. Важно отметить, что понятие устойчивости не касается длительности переходного процесс или максимальных отклонений управляемого параметра в динамике. Следует лишь убедиться, что переменная часть переходной характеристики стремится к нулю.
Чтобы определить, устойчива ли система, нет необходимости решать характеристическое уравнение и определять его корни. Выясним, какие свойства корней необходимы и достаточны для того, чтобы система была устойчивой.
Корни могут быть вещественными, комплексными и чисто мнимыми. Вещественный корень. Пусть один из корней, например р1 , является
вещественным. Тогда слагаемое, определяемое этим корнем в решении, будет представлять собой экспоненту. Если он отрицательный (р1 = -α), то ему соответствует формула С1 ехр(-α,t) . Очевидно, что при t → ∞ этот член будет затухать.
При р1 = +α получится расходящийся процесс (рис. 31.а).

Комплексные корни всегда попарно сопряженные. При отрицательной вещественной
части два корня, например, р1 и р2 , будут иметь вид р1,2 = -α ± iω. В этом случае слагаемые в решении, определяемые корнями, могут быть представлены в виде
С1 еxp [(-α+iω)t] +C2 еxp [(-α-iω)t]. Константы C1 и C2 являются сопряженными комплексными числами, которые в полярной форме можно представить как
C1 = 0,5 R exp (iυ)
C2 = 0,5 R exp (-iυ)
В соответствии с этим пара слагаемых, соответствующих данной паре корней, также образует комплексную сопряженную пару
φ1 = 0,5 R exp (-αt)exp[ i(ωt +υ)] φ2 = 0,5 R exp (-αt)exp[- i(ωt +υ)]
Согласно формуле Эйлера, exp(+iωt) = cosωt + isinωt, поэтому суммирование дает для пары сопряженных корней
φ = φ1 + φ2 = R еxp (-αt)cos(ωt +υ)
Таким образом, пара комплексных сопряженных корней с отрицательной вещественной частью дает в решении дифференциального уравнения слагаемое, представляющее затухающие колебания. При положительной вещественной части колебания будут расходящимися (рис. 31 б, в).
Пара чисто мнимых корней (при нулевой вещественной части) дает незатухающие колебания с постоянной амплитудой (рис. 31 в).
Таким образом, условием того, что переходный процесс будет сходящимся, а система - устойчивой, является отрицательное значение вещественных корней и вещественной части комплексных корней характеристического уравнения.
Всю совокупность корней характеристического уравнения можно представить на
комплексной плоскости с координатами (α,iω) (рис. |
32). При этом действительные |
||||||||
|
|
|
|
корни расположатся на оси абсцисс, |
|||||
|
|
iω |
чисто |
мнимые |
будут |
представлены |
|||
|
|
парами, расположенными по оси |
|||||||
|
|
|
|
||||||
|
|
|
|
ординат и при равном расстоянии |
|||||
|
|
|
|
точек |
|
от |
начала |
координат, |
|
|
|
|
|
комплексные |
корни |
также |
|||
|
|
|
|
расположатся в виде пар точек, |
|||||
|
|
|
|
симметричных |
относительно |
оси |
|||
|
|
|
|
абсцисс. |
По |
расположению |
|||
|
|
α |
|||||||
|
|
относительно |
мнимой |
оси |
корни |
||||
|
|
|
|
различаются на правые и левые. |
|
||||
|
|
|
|
Поскольку |
корни, |
имеющие |
|||
|
|
|
|
отрицательную |
вещественную |
часть, |
|||
|
|
Р и с . 3 2 |
располагаются в левой полуплоскости, |
||||||
|
|
то необходимое и достаточное условие |
|||||||
|
|
|
|
||||||
|
|
|
|
устойчивости |
системы |
можно |
|||
сформулировать так: линейная система управления устойчива, если все корни ее характеристического уравнения - левые. Мнимая ось при этом является границей устойчивости.
6.2Теоремы Ляпунова.
Практически все системы автоматического управления, за редкими исключениями, не являются, строго говоря, линейными. При выводе дифференциального уравнения функционального элемента системы с целью представления его в виде одного из типовых динамических звеньев применяется прием линеаризации, как это показано при выводе уравнения одноемкостного объекта (раздел 5.1.3). Для этого при разложении в ряд Тейлора функций подвода и отвода отбрасывались члены высших порядков в предположении, что они пренебрежимо малы вблизи точки равновесия. Теоремы Ляпунова устанавливают границы обоснованного применения критериев устойчивости линеаризованной системы к реальным системам.
1.Если все корни характеристического уравнения линеаризованной системы - левые, действительная система (как и линеаризованная) устойчива. Добавление членов и производных второй и высших степеней не отражаются на устойчивости системы.
2.Если среди корней характеристического уравнения имеется хотя бы один корень с положительной вещественной частью (правый), то действительная система, как и линеаризованная, будет неустойчивой, даже если учесть производные второго и высших порядков.
3.Если среди корней характеристического уравнения имеются нулевые или чисто мнимые корни, для оценки устойчивости системы необходим учет производных высших порядков, так как в этом случае поведение реальной системы может существенно отличаться от линеаризованной. Такой случай называют
критическим.
Впрактическом отношении теоремы Ляпунова позволяют без всяких оговорок пользоваться критериями устойчивости для линеаризованных систем, поскольку ни один конструктор не допустит в производство систему, хотя бы приближающуюся к границе устойчивости.
6.3. Алгебраические критерии устойчивости. Необходимое условие устойчивости.
Определение корней характеристического уравнения, в особенности для систем выше третьего порядка, является трудоемкой задачей. Поэтому для оценки устойчивости обычно используются не сами корни, а те или иные условия и критерии, которые указывают на вид этих корней в рассматриваемой системе. Критерии

устойчивости подразделяются на алгебраические, основанные на анализе коэффициентов характеристического уравнения и их соотношений, и частотные, в которых используются частотные характеристики передаточной функции или ее знаменателя.
Простейшим алгебраическим критерием является необходимое (но не достаточное) условие устойчивости, которое формулируется следующим образом:
для того, чтобы система была устойчива, необходимо, чтобы все коэффициенты характеристического уравнения были положительными.
Если в числе коэффициентов имеются отрицательные или нулевые, система заведомо неустойчива. Однако положительность коэффициентов не гарантирует от возможной неустойчивости.
Для доказательства этого условия разложим характеристическое уравнение на
множители (см. раздел 4.3): |
|
A(p) = a0(p - p1)(p - p2)…….(p - pn) = 0 |
(6.1) |
Где p1, p2,…… pn - .корни характеристического уравнения. Для того, чтобы система была устойчивой, необходимо, чтобы все эти корни были вещественными отрицательными или комплексными с отрицательной вещественной частью. В первом
случае заменим p1 = -α1, p2 = -α2,… pn = -αn. При подстановке в (6.1) получаем
a0(p + α1)(p + α2)…….(p + αn) = 0 |
(6.2) |
Теперь, раскрывая скобки и возвращаясь к исходному уравнению, получаем при a0 > 0:
а1 = a0(α1 + α2 +……+ αn) > 0
а2 = a0(α1α2 + α1α3……+ αn-1αn) > 0
………………………………………
αn = a0α1α2……αn-1 αn > 0,
то есть, действительно, все коэффициенты характеристического уравнения положительны. Если в числе корней характеристического уравнения есть комплексные сопряженные корни, то их вещественные части должны быть отрицательными. Рассмотрим пару корней p1,2 = -α ±ıω. В разложении на множители этой паре
соответствует произведение
(p + α + ıω)( p + α - ıω) = (p + α)2 + ω2
Поскольку сумма квадратов - величина несомненно положительная, введение в
разложение такого сомножителя не может привести к появлению отрицательных коэффициентов. Таким образом, показано, что коэффициенты характеристического уравнения устойчивой системы положительны. Это необходимое условие устойчивости является достаточным для систем 1 и 2 порядков, в чем можно убедиться, определив корни уравнения. Для систем более высоких порядков выполнение данного условия не гарантирует устойчивость системы
6.4. Критерий Рауса-Гурвица
Этот критерий назван именами двух ученых, которые вывели обобщенный критерий устойчивости для линейных систем любого порядка соответственно в 1877 и 1895 годах. Этот критерий имеет две различные формулировки.
6.4.1 Критерий (алгоритм) Рауса.
Этот критерий представляется в виде следующей таблицы
ri |
Стр. |
|
|
Столбец j |
|
|
|
|
i |
1 |
2 |
3 |
… |
j |
|
|
1 |
a0=c11 |
|
a2=c21 |
a4=c31 |
|
cj1 |
|
2 |
a1=c12 |
|
a3=c22 |
a5=c32 |
|
cj2 |
r3= a0/a1 |
3 |
c13=a2-r3a3 |
|
c23=a4-r3a5 |
c33=a6-r3a7 |
|
cj3=cj+1,1-r3cj+1,2 |
r4= a1/c13 |
4 |
c14=a3-r4c23 |
|
c24=a5-r4c33 |
|
|
|
|
|
|
|
…… |
|
|
|
ri= c1,i-2/c1,i-1 |
i |
c1i=c2,i-2-ric2,i-1 |
|
0 |
0 |
|
0 |

Таблица заполняется следующим образом. В первые две строки записываются последовательно коэффициенты характеристического уравнения четными и нечетными индексами. Они обозначаются как переменные с с индексами, обозначающими номера столбца и строки, на пересечении которых находится данная ячейка таблицы. Если одна из ячеек остается незаполненной, в нее вписывают 0. Начиная с третьей строки, вычисляются коэффициенты r, определяемые как отношение переменных в двух предшествующих строках первого столбца. Далее коэффициенты во всех ячейках вычисляются как разность переменных в двух предшествующих строках следующего столбца с учетом коэффициента r в данной строке. По мере перехода от верхних строк к нижним содержание ячеек в правых столбцах обращается в 0. Заполнение таблицы прекращается, когда значащая величина остается только в первом столбце.
Система устойчива в том и только том случае, если все значения в ячейках столбца 1 положительны. В противном случае система неустойчива, а число правых корней равно числу переходов через 0 в первом столбце.
Например, для системы 3-го порядка таблица Рауса имеет вид
ri |
Строка |
Столбец j |
|
|
|
i |
1 |
|
2 |
|
1 |
a0=c11 |
|
a2=c21 |
|
2 |
a1=c12 |
|
a3=c22 |
r3= a0/a1 |
3 |
c13=a2-r3a3 |
|
0 |
В этом случае условия устойчивости: a0 > 0, a1 > 0, a2- a3(a0/a1) >0
Несмотря на видимую громоздкость таблицы Рауса, ее заполнение легко программируется и не представляет больших трудностей, если коэффициенты характеристического уравнения заданы в численном виде. При этом порядок системы может быть сколь угодно большим. Однако для анализа условий устойчивости в общем виде этот критерий неудобен.
6.4.2 Матрица Гурвица
Критерий устойчивости, предложенный Гурвицем, основан на представлении совокупности коэффициентов характеристического уравнения в виде матрицы
Размер матрицы (число столбцов и строк) соответствует порядку системы. Строки матрицы заполняются поочередно коэффициентами характеристического уравнения с нечетными и четными индексами, причем начинай с 3-й строки коэффициенты сдвигаются так, чтобы по диагонали расположились коэффициенты от a1 до an В ячейки, в которые должны были быть занесены несуществующие коэффициенты (с индексом меньше нуля или больше n), вписываются нули. Согласно критерию Гурвица, система является устойчивой, если при a0 > 0 все n определителей, получаемых из квадратной матрицы коэффициентов, имеют положительные значения. Определители Гурвица составляются следующим образом:

и т.д. Последний определитель включает всю матрицу. Но т.к. в последнем столбце все элементы, кроме нижнего, равны нулю, последний определитель выражается через предпоследний:
n = an. n-1>0
Таким образом, если остальные определители положительны, последний дает единственное условие аn >0, то есть свободный член уравнения - положительный.
В качестве примера рассмотрим условия устойчивости для систем низших порядков. Для системы первого порядка, при a0 > 0, единственное условие, вытекающее из критерия Гурвица: a1 > 0. Для системы второго порядка к этому добавляется условие положительности свободного члена a2 > 0. Тем самым подтверждается, что для систем 1-го и 2-го порядка единственное необходимое и достаточное условие устойчивости - положительные значения всех коэффициентов характеристического уравнения. Для системы 3-го порядка матрица Гурвица имеет вид:
Это значит, что к необходимым |
значения всех |
коэффициентов) добавляется критерий |
2 =(a1а2 - a0а3) > 0. Этот критерий совпадает с |
соответствующим критерием, выведенным ранее для системы 3 порядка на основе алгоритма Рауса.
6.5. Диаграмма Вышнеградского.
Для анализа устойчивости систем 3-го порядка может использоваться также диаграмма Вышнеградского, правила построения которой сформулированы в 1876 году. По этой диаграмме можно судить не только об устойчивости рассматриваемой системы, но и определить вид корней характеристического уравнения, а следовательно, характер переходного процесса.
Рассмотрим характеристическое уравнение системы 3-го порядка:
а0р3 + а1р2 + а2р + а3 = 0
Для того, чтобы привести это уравнение к нормированному виду, разделим обе его части на а3
|
а 0 |
р 3 |
|
а |
1 |
|
|
р 2 |
|
|
а |
2 |
|
|
|
1 0 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|||||||||||||
|
а 3 |
|
а 3 |
|
|
|
|
а 3 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
и введем обозначения: |
а |
0 |
|
|
р 3 |
|
|
а |
1 |
|
|
р 2 |
|
|
|
а |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
1 |
0 |
||||||||||
|
|
|
|
|
|
|
|
а 0 |
|
|
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
а 3 |
||||
|
а |
3 |
|
|
|
|
|
|
а |
3 |
р |
|
|
|
|
а |
3p |
q |
3 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
q , |
|
|
|
|
|
|
|
|||||||||||||||
Тогда исходное уравнение |
|
а 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а 0 |
|||||||||
принимает вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q3 + Xq2 + Yq + 1 = 0 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
a 3 |
|
|
|
|
|
|
a 1 |
|
|
|
a 3 |
|
|
|
|
|
|
|
|||||||
X |
1 |
|
3 |
|
|
|
|
, Y |
|
3 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
a |
|
|
|
a 0 |
|
|
|
|
|
|
|
a 3 |
|
|
|
a 0 |
|
|
|
|
|
|
|
|||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||

На диаграмме (рис.33), построенной в координатах (Х, Y), линиями выделены зоны, соответствующие различным комбинациям корней характеристического уравнения.
Границу устойчивости определяет кривая XY = 1. В области IV, которая располагается внизу и слева от пограничной кривой, имеется пара комплексных корней с положительной вещественной частью.
В точке С, где Х =Y = 3, характеристическое нормированное уравнение принимает вид (q + 1)3 = 0. Следовательно, в этой точке все три корня равны: q1 = q2 = q3 = -1 При этом для исходного характеристического уравнения получаем
p |
1 |
p |
2 |
p |
3 |
|
3 a |
3 |
/ a |
0 |
|
|
|
|
|
|
Вобщем случае в области устойчивости возможны два варианта:
1)все три корня вещественны;
2)один корень вещественный и два комплексных.
Граница между этими двумя случаями определяется равенством нулю дискриминанта уравнения третьей степени, который может быть получен, например, из формулы для дискриминанта кубического уравнения
4 27 D X 2 Y 2 4 X 3 Y 3 18 XY 27 0 (6.3)
Уравнение (6.3) дает на плоскости параметров Х , Y (рис. 33) две кривые СE и СF. Внутри области EСF дискриминант D отрицателен, следовательно, в этой области имеются три вещественных корня (область III). В остальной части области устойчивости дискриминант положителен, что соответствует наличие пары комплексных корней.
Существенное значение имеет
соответствующее граничному случаю,
2X3 - 9XY + 27 = 0 |
(6.4) |
Уравнение (6.4) соответствует на плоскости параметров кривой СD.
В результате область устойчивости разбивается на три зоны I, II и III. Этот график называется диаграммой Вышнеградского. На рис. 33 показано расположение корней внутри каждой из зон области устойчивости.

Вобласти III, где все корни вещественные, в зависимости от начальных условий получим апериодический переходный процесс одного из видов, приведенных на рис 34 в. В областях I и II, где имеется один вещественный корень и два комплексных, переходный процесс будет иметь соответственно формы, показанные на рис. 34 а,б.
Вобласти I быстрее затухает экспонента, и переходный процесс в основном будет определяться колебательной составляющей. Это будет область колебательных процессов. В области II, наоборот, быстрее затухает колебательная составляющая. Это будет область монотонных процессов.
6.6. Частотные критерии устойчивости. Принцип аргумента.
Частотные критерии позволяют судить об устойчивости системы управления по виду ее частотной характеристики. Они основаны на принципе аргумента, т.е. на связи между видом корней характеристического уравнения и аргументом (фазовым углом) частотной функции A(iω), которую получают подстановкой iω в характеристический
полином А(р). Если
A(p) = a0pn + a1pn-1 + … + an
то A(iω) = a0(iω)n + a1(iω)n-1 + … + an
При подстановке четные степени дадут действительные числа, нечетные - мнимые, так что в итоге A(iω) даст комплексное число
A(iω) = U(ω) + iV(ω)
которое может быть представлено в полярной форме
A(iω) = R(ω)eiυ(ω)
Где R - модуль и υ - аргумент (фазовый угол)
|
|
|
R |
U |
2 V 2 |
, arctg |
|
(V / U ) |
|
|
|
|
||||
Раскладывая левую часть характеристического уравнения на множители по корням |
||||||||||||||||
характеристического уравнения (формула 6.1) и заменяя р на iω, получаем: |
||||||||||||||||
A (iω) = a0(iω - p1)( iω - p2)…….( iω - pn) = 0, |
|
|
|
|
||||||||||||
То есть произведение |
комплексных |
чисел, |
каждое из которых может быть |
|||||||||||||
|
|
|
|
|
|
представлено |
в |
виде |
вектора |
на |
комплексной |
|||||
iv |
|
|
|
|
|
плоскости. Для того, чтобы пояснить расположение |
||||||||||
iω - p k |
|
|
|
и направление этих векторов, обратим внимание |
||||||||||||
|
|
|
на то, что любой корень характеристического |
|||||||||||||
p - p k |
|
p k |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||p k || |
2 2 |
, |
|
arctg ( |
|
/ |
|
) |
|
|
|
|
||||
k |
|
kυ k |
k |
|
k |
|
|
k |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
pk |
= αk + iωk |
|
|
|
|||
|
|
|
|
|
|
уравнения |
также может быть |
|||||||||
|
|
|
|
|
|
отображен |
|
в |
виде вектора |
с |
модулем | pk | и |
|||||
Р и с . 3 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

аргументом υk (рис. 35). Если вектор р обозначает на комплексной плоскости точку, соответствующую определенному значение параметра р, которое может быть
вещественным, комплексным или чисто мнимым, то разность |
(p-pk ) отобразится в |
|
виде отрезка, соединяющего точки pk |
и p направленного от pk к p. Если рассматривать |
|
разности между мнимым значением |
переменной и корнями |
характеристического |
уравнения (iω - pk), то каждая такая разность представит собой вектор, направленный от точки, соответствующей данному корню, к точке на мнимой оси.
При перемножении комплексных чисел, представляемых в полярной форме, их модули перемножаются, а аргументы суммируются, так что аргумент частотной характеристики
(iω - pk)= ΣАrg((iω - pk)
Для того, чтобы установить связь между видом корней характеристического уравнения
иизменением аргумента Аrg (iω - pk), рассмотрим частные случаи..
1)Вещественные корни (рис. 36 а).
Точка pk = ±α, соответствующая вещественному корню, лежит на вещественной оси, справа или слева от начала координат в зависимости от знака корня. При ω = 0 вектор (iω
- pk) располагается на оси абсцисс и направлен к началу координат. При
увеличении |
|
ω |
вектор |
поворачивается |
в |
положительном |
|
направлении |
для |
отрицательного |
|
корня и в отрицательном - для |
|||
положительного. В пределе, когда |
|||
ω→∞, вектор |
(iω |
- pk) занимает |
|
положение, |
параллельное мнимой |
||
оси, и угол его поворота составляет |
|||
π/2 для отрицательного корня или - |
|||
π/2 для положительного |
|||
2) Пара комплексных |
сопряженных |
||
корней с отрицательной вещественной частью (рис. 36 б). В этом случае точки, соответствующие корням, находятся во 2 и 3 квадрантах. При ω = 0 оба вектора (iω - pk) направлены к началу координат и образуют угол γ с горизонтальной осью. При ω→∞ оба вектора сливаются в один, направленный параллельно мнимой оси. При этом нижний вектор (соответствующий отрицательной мнимой части корня) при изменении частоты от ω = 0 до в ω→∞ поворачивается на угол (π/2-γ), а верхний - на (π/2+ γ). Таким образом, приращение аргумента для пары комплексных сопряженных корней составляет π. Если действительная часть пары комплексных корней положительная, то соответствующие точки располагаются в 1 и 4 квадрантах, и суммарное приращение аргумента равно (- π).
Таким образом, если характеристическое уравнение n-го порядка имеет l правых корней, то, независимо от того, будут эти корни действительными или комплексными, суммарное приращение аргумента, соответствующее этим корням, составит при изменении частоты от 0 до бесконечности -l(π/2), а для остальных (левых) корней соответственно (n-l)(π/2). Суммарное приращение
ArgA |
( i ) |
|
|
|
|
n |
|
2 l |
|
||||||||
|
0 |
|
||||||
|
|
|
2 |
|
|
|
||
|
|
|
|
|
|
|
||