

Модуль 0: Введение
Цифровой сигнальный контроллер TMS320F2812
Texas Instruments Incorporated

Что такое
цифровой сигнальный контроллер ?
1.Микропроцессор:
–Центральное устройство большинства компьютерных систем
–Две основные архитектуры:
»Архитектура Фон-Неймана
»Гарвардская архитектура
–Архитектура Фон-Неймана:
»Совмещенное пространство программ и данных
»Единая шина доступа к памяти
»Пример: Intel‘s x86 семейство процессоров Pentium
–«Гарвардская» архитектура:
»Два независимых пространства программ и данных
»Независимые шины для доступа к памяти программ и данным
–Для работы с микропроцессорами необходимы дополнительные устройства
1 - 2

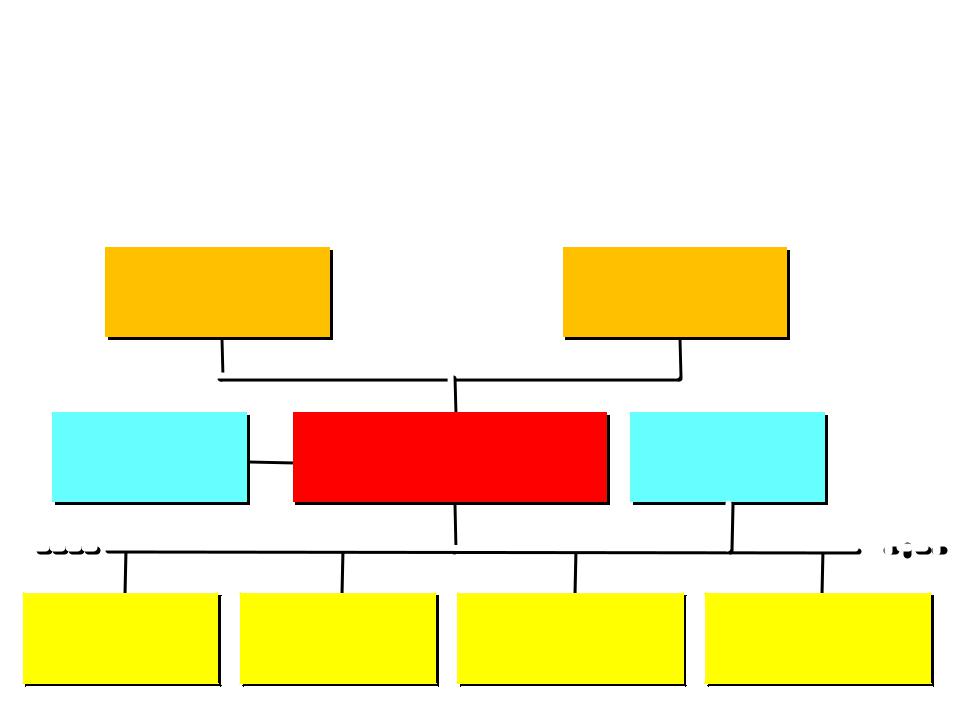
История (1984):
Микропроцессор Intel 80x86
Адресный
модуль
-Менеджер памяти
-Логические/физические
адреса
Операционный
модуль
-ЦП
-АЛУ
-Регистры
Модуль
шин
-Управление шинами
-Интерфейсные шины адреса & данных
-Очередь команд
Модуль
инструкций
-Декодер инструкций
-Очередь операций
Адрес
Управление/
статус
Данные
1 - 3
Ваш настольный компьютер
является...
2. Микрокомпьютером
– |
Микрокомпьютер = Микропроцессор + Память + Периферия |
– |
Пример: ваш настольный компьютер |
|
|
|
|
|
|
|
|
|
|
|
|
Память |
|
|
|
|||
|
|
|
Память |
|
|
|
|
|
|
|||||||||
|
|
|
программ |
|
|
|
данных |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Шина памяти |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Тактовый |
|
|
|
Микропроцессор |
|
|
|
Таймер / |
|
||||||||
|
генератор |
|
|
|
|
|
|
|
|
|
|
|
счетчик |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Периферийная шина
Цифровой Цифровой Аналоговый Аналоговый |
|||
вывод |
ввод |
ввод |
вывод |
1 - 4

Периферия компьютера
•Периферия включает:
–Линии цифрового ввода / вывода
–Аналого-цифровой преобразователь (АЦП)
–Цифро-аналоговый преобразователь (ЦАП)
–Модуль таймера / счетчик
–Выходные линии широтно-импульсного модулятора (ШИМ)
–Входные цифровые линии захвата
–Сетевые интерфейсные модули:
»Последовательный коммуникационный интерфейс (SCI) - UART
»Последовательный периферийный интерфейс (SPI)
»Шина интерфейсных интегральных схем (I2C)
»Шина CAN (CAN)
»Шина внутренних межсоединений (LIN)
»Шина USB (USB)
»Локальная / глобальная сеть (LAN, WAN)
–Устройства графического вывода
–И много другое …
1 - 5

Система на кристалле
3.Микроконтроллер
–Не более, чем микрокомпьютер на кристалле!
–Вся вычислительная мощь и каналы ввода/вывода,
которые потребуются при проектировании систем
управления реального времени «на кристалле».
–Обеспечит низкую стоимость и высокую производительность для встраиваемых
приложений управления
–Основа большинства современных решений
–Свыше 200 разнообразных семейств микроконтроллеров
–Архитектуры «Фон-Неймана» и «Гарвардская»
лежат в основе микроконтроллеров
1 - 6

Цифровой сигнальный процессор
4.Процессоры цифровой обработки сигналов (DSP)
–Подобны микропроцессорам, например ядро вычислительной системы
–Содержат аппаратные модули для ускорения процесса вычисления сложных математических операций:
»Дополнительный аппаратный умножитель
»Дополнительное арифметическое устройство
»Дополнительные системные шины параллельного доступа
»Дополнительный аппаратный сдвигатель для масштабирования и/или умножения/деления на 2n
1 - 7
Типовые алгоритмы DSP?
•Сумма произведений (SOP) – основной элемент большинства DSP алгоритмов:
Алгоритмы
• Фильтр с конечной y(n) импульсной характеристикой
M
ak x(n k)
k 0
|
Фильтр с бесконечной |
|
|
M |
|
k |
|
|
N |
|
|
|
|
|
|
|
• |
|
|
a |
k |
|
k) |
|
|
||||||||
|
y(n) |
|
|
x(n k) |
|
b y(n |
|
|
||||||||
импульсной характеристикой |
|
k 0 |
|
|
|
k 1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n) |
N |
x(k)h(n k) |
|
|
|
|
|
|
|
|
||||
• Свертка |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
k 0 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|||||||||||||
|
Дискретное преобразование |
X (k) x(n) exp[ j(2 / N )nk] |
|
|
||||||||||||
• |
|
|
|
N 1 |
|
|
|
|
|
|
|
|
|
|||
Фурье |
|
|
n 0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
• Дискретное косинусное |
|
|
N 1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
F u c(u). f (x).cos |
|
u 2x 1 |
|
|||||||||||||
2N |
||||||||||||||||
преобразование |
|
|
x 0 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 - 8 |
|
|||
Реализовать SOP на
микроконтроллере
3
ydata[i]* coeff [i]
i 0
•Задача : воспользоваться ПЭВМ и программой, реализующей уравнение на языке C, например для Microsoft Visual Studio.Net
•Текст С программы приведен ниже:
#include <stdio.h> int data[4]={1,2,3,4}; int coeff[4]={8,6,4,2}; int main(void)
{ int i;
int result =0;
for (i=0;i<4;i++)
result += data[i]*coeff[i printf("%i",result);
} return 0;
1 - 9
6 основных операций для SOP
3
ydata[i]* coeff [i]
i 0
•Как будет проходить исполнение на Pentium?
1.Установление указателя Pointer1 на data[0]
2.Установление второго указателя Pointer2 на coeff[0]
3.Чтение data[i] в ядро
4.Чтение coeff[i] в ядро
5.Умножение data[i]*coeff[i]
6.Сложение предыдущего умножения с последующим
7.Модификация Pointer1
8.Модификация Pointer2
9.Инкремент ‘i';
10.Если i<3 , тогда вернуться на шаг 3 и продолжить
•Шаги с 3 по 8 называются “6 основных операций DSP”
•DSP может выполнить все 6 шагов за один машинный цикл!
1 - 10