

2.4. Алгоритмы сжатия аудиосигналов
2.4.1. Дифференциальная импульсно-кодовая модуляция
В обычной импульсно-кодовой модуляции каждый отсчет кодируется независимо от других. Однако у многих источников сигнала при стробировании с частотой Найквиста или быстрее проявляется значительная корреляция между последовательными отсчетами [5] (в частности, источник РС является квазистационарным источником и может относиться к рассматриваемым видам источников). Другими словами, изменение амплитуды между последовательными отсчетами в среднем относительно малы. Следовательно, схема кодирования, которая учитывает избыточность отсчетов, будет требовать более низкой битовой скорости.
При дифференциальной импульсно-кодовой модуляции (ДИКМ) по каналу связи передаются не значения отсчетов сообщения, а разность между отсчетами. Один из распространённых способов эффективной передачи непрерывных сообщений - способ передачи с предсказанием.
Последовательность коррелированных отсчётов исходного сигнала подают на один из входов вычитающего устройства, на другой вход поступает сигнал предсказания, сформированный из предыдущих отсчётов. Полученный сигнал ошибки предсказания поступает в тракт передачи. Поскольку в сигнале ошибки как раз и содержатся новые сведения, представляющие разность между истинным и предсказанным значением, то такой способ передачи называется передачей с предсказанием [5].
Известно большое число вариантов реализации кодирования с предсказанием. Основное различие сводится к различию операций формирования сигнала ошибки: в одних системах сигнал ошибки формируется в аналоговой форме, а затем кодируется, в других - вначале кодируется исходный аналоговый сигнал, а затем формируется сигнал ошибки.
В системах с ДИКМ обычно применяют неравномерное квантование сигнала ошибки, так как наиболее вероятны малые ошибки. Поскольку мощность шума квантования составляет определённую долю мощности квантуемого процесса, а мощность ошибки предсказания существенно меньше мощности сообщения, шум квантования при ДИКМ меньше, чем при обычной ИКМ при том же числе уровней. ДИКМ обеспечивает одинаковое с ИКМ качество передачи при меньшем числе символов в кодовой комбинации Корреляция между отсчётами возрастает по мере сокращения интервала между ними. Поэтому в пределе при большой частоте дискретизации число уровней квантования сигнала ошибки можно уменьшить до двух и перейти к одноразрядным системам.
Такой способ кодирования называют дельта-модуляцией (ДМ). Дельта модуляция (ДМ), отличается от ДИКМ тем, что передается только знак сигнала ошибки.
Предположим,
что
![]() означает текущий отсчет источника, и
пусть
означает текущий отсчет источника, и
пусть![]() обозначает предсказанное значение
(оценку) для
обозначает предсказанное значение
(оценку) для![]() ,
определяемое как
,
определяемое как
![]() .
(2.11)
.
(2.11)
Таким
образом,
![]() является взвешенной линейной комбинациейM
отсчетов, а
является взвешенной линейной комбинациейM
отсчетов, а
![]() являются коэффициентами предсказания.
Величины
являются коэффициентами предсказания.
Величины![]() выбираются так, чтобы минимизировать
некоторую функцию ошибки между
выбираются так, чтобы минимизировать
некоторую функцию ошибки между![]() и
и![]() .
.
Величина ошибки определяется как:
![]() (2.12)
(2.12)
Виды
линейных предсказаний. Рассмотрим
виды предсказания. «Линейное» предсказание
означает, что
![]() является линейной функцией предыдущих
отсчетов; при «нелинейном» предсказании
– это нелинейная функция. Порядок
предсказания определяется количеством
используемых предыдущих отсчетов. То
есть, предсказание нулевого и первого
порядка является линейным, а второго и
более высокого порядка - нелинейным.
При линейном предсказании восстановить
сигнал значительно проще, чем при
нелинейном предсказании. Будем
рассматривать только линейное
предсказание.
является линейной функцией предыдущих
отсчетов; при «нелинейном» предсказании
– это нелинейная функция. Порядок
предсказания определяется количеством
используемых предыдущих отсчетов. То
есть, предсказание нулевого и первого
порядка является линейным, а второго и
более высокого порядка - нелинейным.
При линейном предсказании восстановить
сигнал значительно проще, чем при
нелинейном предсказании. Будем
рассматривать только линейное
предсказание.
Предсказание нулевого порядка. В этом случае для предсказания текущего отсчета используется только предыдущий отсчет РС, т.е.
![]() =>
=>
![]() (2.13
(2.13
Предсказание первого порядка (линейная экстраполяция). В этом случае для предсказания текущего отсчета используется не только предыдущий отсчет, но и разница между предпоследним и последним отсчетами, которая суммируется к общему результату:
![]()
![]() (2.14)
(2.14)
Реализация ДИКМ. Определив метод определения коэффициентов предсказания, рассмотрим блок-схему практической системы ДИКМ, показанную ниже (рис. 2.13).

Рис 2.13. Блок-схема кодера ДИКМ
В
этой схеме предсказатель стоит в цепи
обратной связи, охватывающей квантователь.
Вход предсказателя обозначен
![]() .
Он представляет собой сигнальный отсчет
.
Он представляет собой сигнальный отсчет
![]() ,
искаженный в результате квантования
сигнала ошибки. Выход предсказателя
равен:
,
искаженный в результате квантования
сигнала ошибки. Выход предсказателя
равен:
![]() ; (2.15)
; (2.15)
Разность
![]() является входом квантователя, а
является входом квантователя, а![]() обозначает его выход. Величина квантованной
ошибки предсказания
обозначает его выход. Величина квантованной
ошибки предсказания![]() кодируется последовательностью двоичных
символов и передается через канал в
пункт приема. Квантованная ошибка
кодируется последовательностью двоичных
символов и передается через канал в
пункт приема. Квантованная ошибка![]() также суммируется с предсказанной
величиной
также суммируется с предсказанной
величиной![]() ,
чтобы получить
,
чтобы получить![]() .
.
В
месте приема используется такой же
предсказатель, как на передаче, а его
выход
![]() суммируется с
суммируется с![]() ,
чтобы получить
,
чтобы получить![]() (см. рис. 2.14).
(см. рис. 2.14).
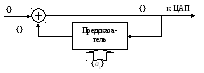
Рис.2.14. Блок-схема декодера ДИКМ
Сигнал
![]() является входным воздействием для
предсказателя и в то же время образует
входную последовательность, по которой
с помощь ЦАП восстанавливается сигналx(t).
Использование обратной связи вокруг
квантователя обеспечивает то, что ошибка
в
является входным воздействием для
предсказателя и в то же время образует
входную последовательность, по которой
с помощь ЦАП восстанавливается сигналx(t).
Использование обратной связи вокруг
квантователя обеспечивает то, что ошибка
в
![]() - просто ошибка квантования
- просто ошибка квантования![]() и что здесь нет накопления предыдущих
ошибок квантования при декодировании.
Имеем
и что здесь нет накопления предыдущих
ошибок квантования при декодировании.
Имеем
![]() (2.16)
(2.16)
Следовательно,
![]() .
Это означает, что квантованный отсчет
.
Это означает, что квантованный отсчет![]() отличается от входа
отличается от входа![]() ошибкой квантования
ошибкой квантования![]() независимо от использования предсказателя.
Значит, ошибки квантования не накапливаются.
независимо от использования предсказателя.
Значит, ошибки квантования не накапливаются.
В
рассмотренной выше системе ДИКМ оценка
или предсказанная величина
![]() отсчета сигнала
отсчета сигнала![]() получается посредством линейной
комбинации предыдущих значений
получается посредством линейной
комбинации предыдущих значений![]() ,k
= 1, 2, …, M,
как показано в формуле (2.15). Улучшение
качества оценки можно получить включением
в оценку линейно отфильтрованных
последних значений квантованной ошибки.
,k
= 1, 2, …, M,
как показано в формуле (2.15). Улучшение
качества оценки можно получить включением
в оценку линейно отфильтрованных
последних значений квантованной ошибки.
Конкретно,
оценку
![]() можно выразить так:
можно выразить так:
![]() ,
,
где
{![]() }
– коэффициенты фильтра для квантованной
последовательности ошибок
}
– коэффициенты фильтра для квантованной
последовательности ошибок
![]() .
Блок-схемы кодера на передаче и декодера
на приеме приведены ниже на рис. 2.15.
.
Блок-схемы кодера на передаче и декодера
на приеме приведены ниже на рис. 2.15.

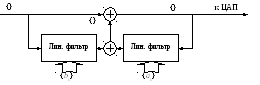
Рис.2.15. Блок-схема кодера и декодера ДИКМ с линейным фильтром
Здесь
два ряда коэффициентов {![]() }
и {
}
и {![]() }
выбираются так, чтобы минимизировать
некоторую функцию ошибки
}
выбираются так, чтобы минимизировать
некоторую функцию ошибки
![]() ,
например, среднеквадратическую ошибку.
,
например, среднеквадратическую ошибку.
Наряду с равномерным (линейным) квантованием, при котором шаг квантования постоянен в пределах всего динамического диапазона, существует возможность согласования величины шага квантования с амплитудой сигнала. Для малых сигналов величина шага квантования мала, а для больших – возрастает. При этом с ростом амплитуды сигнала возрастает и мощность шумов квантования. Если использовать логарифмическую зависимость между выходным и входным сигналами, то можно поддерживать соотношение сигнал/шум квантования ниже заданной границы, как для малых, так и для больших по уровню сигналов (рис 2.16).

Рис. 2.16. Кусочно-линейная аппроксимация при адаптивном квантовании.
При
использовании такого метода используется
больше бит для слабых сигналов, где шум
квантования наиболее заметен. Широко
распространенный формат, использующий
мю-функцию (![]() ),
часто характеризуют как формат, сжимающий
12-битные отсчеты в 8-битные.
),
часто характеризуют как формат, сжимающий
12-битные отсчеты в 8-битные.
Адаптивная
дифференциальная импульсно-кодовая
модуляция.
Многие реальные источники (например,
источники РС), как уже было сказано выше,
являются квазистационарными по своей
природе. Одно из свойств квазистационарности
характеристик случайного выхода
источника заключается в том, что его
дисперсия и автокорреляционная функция
медленно меняются со временем. Кодеры
ИКМ и ДИКМ, однако, проектируются в
предположении, что выход источника
стационарен. Эффективность и рабочие
характеристики таких кодеров могут
быть улучшены, если они будут адаптироваться
к медленно меняющейся во времени
статистике источника [5]. Как в ИКМ, так
и в ДИКМ ошибка квантования
![]() ,
возникающая в равномерном квантователе,
работающем с квазистационарным входным
сигналом, будет иметь меняющуюся во
времени дисперсию (мощность шума
квантования).
,
возникающая в равномерном квантователе,
работающем с квазистационарным входным
сигналом, будет иметь меняющуюся во
времени дисперсию (мощность шума
квантования).
Одно
улучшение, которое уменьшает динамический
диапазон шума квантования, - это
использование адаптивного квантователя.
Другое – сделать адаптивным предсказатель
в ДИКМ. При этом коэффициенты предсказателя
могут время от времени меняться, чтобы
отразить меняющуюся статистику источника
сигнала. Определенные таким образом
коэффициенты предсказателя могут быть
вместе с ошибкой квантования
![]() переданы приемнику, который использует
такой же предсказатель. К сожалению,
передача коэффициентов предсказателя
приводит к увеличению необходимой
битовой скорости, частично компенсируя
снижение скорости, достигнутое посредством
квантователя с немногими битами
(немногими уровнями квантования) для
уменьшения динамического диапазона
ошибки
переданы приемнику, который использует
такой же предсказатель. К сожалению,
передача коэффициентов предсказателя
приводит к увеличению необходимой
битовой скорости, частично компенсируя
снижение скорости, достигнутое посредством
квантователя с немногими битами
(немногими уровнями квантования) для
уменьшения динамического диапазона
ошибки![]() ,
получаемой при адаптивном предсказании.
,
получаемой при адаптивном предсказании.
В
качестве альтернативы предсказатель
приемника может вычислить свои собственные
коэффициенты предсказания через
![]() и
и![]() ,
где
,
где
![]() ;
(2.17)
;
(2.17)
Если
пренебречь шумом квантования,
![]() эквивалентно
эквивалентно![]() .
Следовательно,
.
Следовательно,![]() можно использовать для оценки АКФ в
приемнике.
можно использовать для оценки АКФ в
приемнике.
Основное преимущество такого метода адаптации – это отказ от решения СЛАУ, что значительно уменьшает вычислительные затраты.