

Andrieiev_Teoretychna_mekhanika_2014
.pdfЗразок оформлення титульноїсторінки
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ «ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Кафедра теоретичної механіки
КУРСОВА РОБОТА
з дисципліни «Теоретична механіка» на тему «АНАЛІЗ СТАТИКИ ТА КІНЕМАТИКИ СИСТЕМ ТІЛ»
Виконав:
студент групи І-17а, Петренко І.О.
Керівник:
доц. Лавінський Д.В.
Харків НТУ «ХПІ» 2013
191
ЗМІСТ |
|
|
Вступ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
1. Постановка задач статики та кінематики . . . . . . . . . . . . . |
4 |
|
2. Статичний аналіз рівноваги систем тіл . . . . . . . . . . . . . . |
5 |
|
2.1. Визначення реакцій в’язів для тіла при дії плоскої системи сил |
5 |
|
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
||
|
||
2.2. Визначення реакцій в’язів для системи тіл при дії плоскої сис- |
7 |
|
теми сил . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
|
2.3. Визначення реакцій в’язів для тіла при дії просторової |
9 |
|
системи сил . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
||
|
||
3. Кінематичний аналіз систем тіл . . . . . . . . . . . . . . . . . . |
11 |
|
3.1. Визначення кінематичних характеристик руху системи тіл |
11 |
|
3.2. Визначення кінематичних характеристик складного руху |
14 |
|
точки та системи тіл . . . . . . . . . . . . . . . . . . . . . . . . . . |
||
Висновки . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
16 |
|
Перелік літературних джерел . . . . . . . . . . . . . . . . . . . . . |
17 |
ВСТУП
Укурсовій роботі надано результати, одержані за темою досліджень. В основу аналізу покладено теоретичні положення статики та кінематики абсолютно твердих тіл [1,2]. Для досліджень застосовано комп’ютерні технології [3], реалізовані на базі програмного комплексу
«КіДиМ» [4].
Упершому розділі наведено розрахункові схеми та вихідні дані згідно з індивідуальним завданням для досліджень.
Удругому розділі надано результати розрахунків та розробки файлів КіДиМ для виконання досліджень статичного аналізу системи тіл при дії плоскої та просторової систем сил згідно з індивідуальним завданням.
Утретьому розділі надано результати розрахунків та програмні розробки для виконання досліджень з аналізом кінематики систем тіл та складного руху точки відповідно до індивідуального завдання.
192

Наприкінці роботи сформульовано короткі висновки та перелічено використані літературні джерела.
1. ПОСТАНОВКА ЗАДАЧ СТАТИКИ ТА КІНЕМАТИКИ
Для заданих варіантів розрахункових схем необхідно визначити реакції в’язей систем тіл, поданих на рисунку 6.1, та проаналізувати залежність реакцій від кута нахилу активної сили F .
Рисунок 6.1 – Схеми для аналізу статики тіл
Для заданих варіантів розрахункових схем, наданих на рис. 6.2, необхідно:
визначити кінематичні характеристики плоскопаралельного руху тіл, які складають кривошипно-шатунний механізм та точок В и С, закон руху задано залежністю від часу кута обертання кривошипу –
OA ;
знайти абсолютні швидкість й прискорення точки М у складному русі разом з тілом D, що обертається навколо нормальної до плоскості осі, яка проходить через точку О1. Закони руху задано залежностями від часу кута обертання φе(t) та відносного руху точки OМr(t).
193

Дослідження зі статики необхідно виконати при варіюванні α
0 360 |
– кута нахилу сили, дослідження з кінематики – при ва- |
|
|
|
|
ріюванні 0 t t – часу.
Рисунок 6.2 – Схеми для аналізу кінематики тіл
2. СТАТИЧНИЙ АНАЛІЗ РІВНОВАГИ СИСТЕМ ТІЛ
2.1. Визначення реакцій в’язей для тіла при дії плоскої системи сил
Файл вихідної інформації для ПК КіДиМ [4], складений з метою визначення та аналізу реакцій опор при дії плоскої системи сил на тверде тіло, має такий вигляд.
РАБОТА:= № 1.1;
ВЫПОЛНИЛ:= Петренко І.О., И-17а;
P.x = XA + F*cos(alfa) – Q;
P.y = YA – F*sin(alfa) + RB;
P.fiz = Q*b/2+F*sin(alfa)*c–F*cos(alfa)*b+M–RB*(a+c); F = 90; M = 63; q = 12; a = 10; b = 8; c = 6; Q = q*b; alfa = alfaG*PI/180;
RA = sqrt(XA^2 + YA^2); e = abs(RA – F)*100/F;
НЕИЗВЕСТНЫЕ:= XA,YA,RB;
ВАРЬИРОВАТЬ:= alfaG(0,360);
ПОКАЗАТЬ:= RA,e;
РАСЧЕТ:= СТАТИКА;
КОНЕЦ;
194
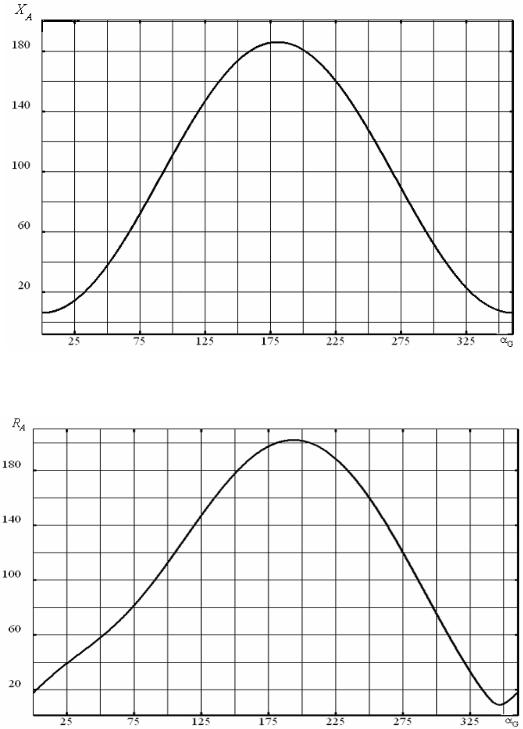
Наведемо окремі розрахункові дані у вигляді графіків, які характеризують залежності сил реакцій від кута нахилу активної зосередженої сили.
Рисунок 6.3 – Залежність горизонтальної складової сили реакції точки А від кута нахилу активної зосередженої сили
Рисунок 6.4 – Залежність модуля реакції точки А від кута нахилу активної зосередженої сили
195

Рисунок 6.5 – Залежність модуля сили реакції точки В від кута нахилу активної зосередженої сили
Рисунок 6.6 – Залежність параметра е, який характеризує співвідношення активної зосередженої сили та реакції RA від кута нахилу цієї сили
196
2.2. Визначення реакцій в’язей при дії плоскої системи сил на систему двох тіл
Файл вихідної інформації для ПК КіДиМ [4], складений для визначення та аналізу реакцій опор при дії плоскої системи сил на систему двох тіл, має такий вигляд.
РАБОТА:= № 1.2; ВЫПОЛНИЛ:= Петренко І.О., И-17а;
P.x1 = XA + F*cos(alfa) + RCX;
P.y1 = YA – F*sin(alfa) + RCY;
P.fiz1 = F*sin(alfa)*b + RCY*a – M; P.x2 = XB– RCX;
P.y2 = – RCY + YB – Q;
P.fiz2 = Q*b/2 – RCX*a + RCY*b;
F = 90; M = 63; q = 12; a = 10; b = 8; Q = q*b;
RC = sqrt(RCX^2 + RCY^2);
RA = sqrt(XA^2 + YA^2); RB = sqrt(XB^2 + YB^2);
e1 = abs(RA – RC)*100/abs(RA);
e2 = abs(RB – RC)*100/abs(RB);
НЕИЗВЕСТНЫЕ := XA,YA, XB, YB, RCX, RCY; ВАРЬИРОВАТЬ := alfaG(0,360); alfa = alfaG*PI/180;
ПОКАЗАТЬ:= RA,RC,RB,e1,e2;
РАСЧЕТ:= СТАТИКА; КОНЕЦ;
Наведемо окремі розрахункові дані у вигляді графіків, які характеризують залежності сил реакцій від кута нахилу активної зосередженої сили.
197

Рисунок 6.7 – Залежність модуля сили реакції точки А від кута нахилу активної зосередженої сили
Рисунок 6.8 – Залежність модуля сили реакції точки В від кута нахилу активної зосередженої сили
198

Рисунок 6.9 – Залежність модуля сили тиску в шарнірі точки С від кута нахилу активної зосередженої сили
Рисунок 6.10 – Залежність параметра е1, який характеризує різницю між реакціями RA та RС від кута нахилу активної зосередженої сили
199

2.3. Визначення реакцій в’язей для тіла при дії просторової системи сил
Файл вихідної інформації для ПК КіДиМ [4], складений з метою визначення та аналізу реакцій опор при дії просторової системи сил на тверде тіло, має такий вигляд.
РАБОТА:= № 1.3;
ВЫПОЛНИЛ:= Петренко І.О., гр. И-17а; P.x = XO + XB + F*sin(alfa);
P.y = YO + YB – F*cos(alfa) + P;
P.fix = – P*a + F*cos(alfa)*(a+b+c) – YB*(a + b); P.fiy = – XB*(a+b) – F*sin(alfa)*(a+b+c);
P.fiz = P*r – F*sin(alfa)*2*c;
F = 90; a = 10; b = 5; c = 2; r = 0.8; alfa = alfaG*PI/180;
НЕИЗВЕСТНЫЕ:=XO,YO, XB,YB, P; ВАРЬИРОВАТЬ:= alfaG (0,360);
РАСЧЕТ:=СТАТИКА;
КОНЕЦ;
Наведемо окремі розрахункові дані у вигляді графіків, які характеризують залежності сил реакцій від кута нахилу активної сили.
Рисунок 6.11 – Залежність горизонтальної складової реакції опори О від кута нахилу активної зосередженої сили
200