

11 Протокол Ethernet
Происхождение: Digital Equipment Corporation, Intel и Xerox, 1976 год.
Реализация: масса микросхем самых разных производителей. Базируется на стандарте IEEE 802.3.
Форматы: 10Base2, 10BaseT и 100BaseT, 100BaseFX, 1 Gigabit; кабели с медной жилой (витая пара/тонкий коаксиальный) и оптоволокно.
Коннекторы: коаксиальные и RJ45.
Максимальное число узлов: 1024; с использованием маршрутизаторов может быть увеличено.
Длина соединения: от 100 метров (10Base2) до 50 км (одномодовый оптоволоконный кабель с коммутаторами).
Скорость передачи: 10 Мбит/с, 100 Мбит/с.
Размер сообщения: от 46 до 1500 байт.
Метод обмена: одноранговый.
Типичные области применения: почти повсеместная распространенность в офисных и административных локальных сетях. Широко используется для связи персональных компьютеров, программируемых контроллеров и управляющих систем. Постепенно начинает применяться и на "уровне датчиков" в производственных системах.
Достоинства: Ethernet самый распространенный и практически универсальный международный сетевой стандарт. Поддерживает передачу больших объемов данных с высокой скоростью, способен удовлетворить потребности крупных систем.
Недостатки: большие издержки при передаче данных небольшого объема. Подача питающего напряжения по сетевому кабелю не производится. Физически уязвимые коннекторы, повышенная по сравнению с другими промышленными шинами чувствительность к электромагнитным помехам. Слишком большое разнообразие открытых и фирменных стандартов обработки данных.
Объединение миллионов учрежденческих компьютеров в сети и распространение Интернета по всему миру превратило Ethernet во всеобщий сетевой стандарт. Аппаратные и программные средства для Ethernet достигли такого уровня, когда строить несложные сети и подключать компьютеры друг к другу способен даже совершенно неопытный пользователь.
Приложение б
Практические задания по теме «Передаточные функции АСР»
Общее задание
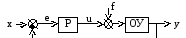
Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ). Требуется определить:
- передаточную функцию разомкнутой системы W∞(s);
- характеристическое выражение замкнутой системы (ХВЗС);
- передаточные функции замкнутой системы Фз(s) – по заданию,
Фв(s) – по возмущению, ФЕ(s) – по ошибке;
- коэффициенты усиления АСР;
- устойчивость системы.
Пример решения задания
Дан
ПИ-регулятор с ПФ вида Wp
= 2 +
![]() и объект управления, описываемый
дифференциальным уравнением
и объект управления, описываемый
дифференциальным уравнением
![]() .
.
Определяется передаточная функция объекта:
![]() .
.
Тогда передаточная функция разомкнутой системы имеет вид
![]() .
.
ХВЗС:
D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1.
Передаточные функции замкнутой системы:
![]() - по заданию,
- по заданию,
![]() - по ошибке,
- по ошибке,
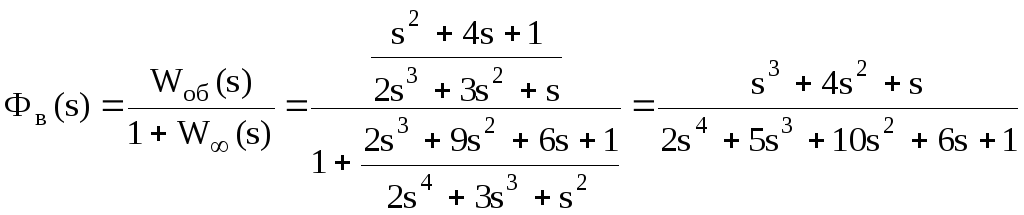 - по возмущению.
- по возмущению.
По передаточным функциям определяются коэффициенты усиления путем подстановки в них s = 0:
Кз = Фз(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Устойчивость АСР определяется по критерию Гурвица.
Поскольку коэффициенты ХВЗС а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1 (степень полинома n = 4), то матрица Гурвица имеет вид
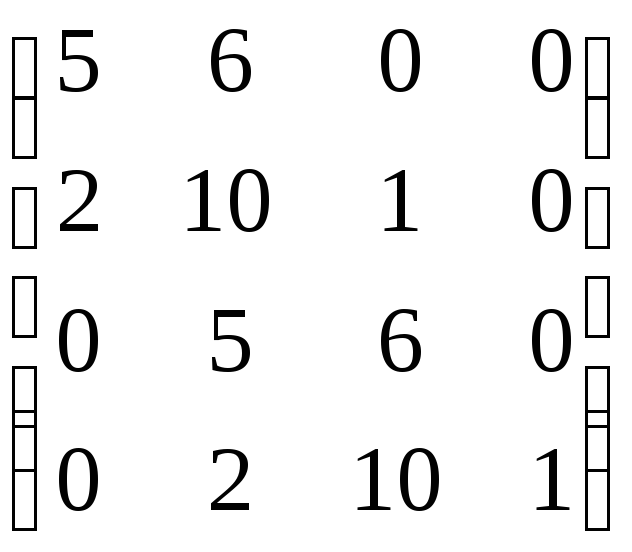
(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители:
Δ1 = 5 > 0,
![]() ,
,

Δ4 = 1* Δ3 = 1*209 > 0.
Поскольку все определители положительны, то АСР устойчива. ♦
Варианты заданий
|
Вариант |
ПФ регулятора |
Дифференциальное уравнение ОУ |
|
1 |
Wp
= 4 +
|
|
|
2 |
Wp
= 5 +
|
|
|
3 |
Wp = 0,5 |
|
|
4 |
Wp
= 2 +
|
|
|
5 |
Wp
= 1 +
|
|
|
6 |
Wp = 4 |
|
|
7 |
Wp
= 5 +
|
|
|
8 |
Wp = 8 |
|
|
9 |
Wp
= 4 +
|
|
|
10 |
Wp
=
|
|
|
11 |
Wp
= 1 +
|
|
|
12 |
Wp
= 1 +
|
|
|
13 |
Wp
= 5 +
|
|
|
14 |
Wp
= 1 +
|
|
|
15 |
Wp
=
|
|
|
16 |
Wp
= 1 +
|
|
|
17 |
Wp
= 1 +
|
|
|
18 |
Wp = 2 |
|
|
19 |
Wp = 4 |
|
|
20 |
Wp
=
|
|
|
21 |
Wp
= 2 +
|
|
|
22 |
Wp
= 1 +
|
|
|
23 |
Wp
= 0,5 +
|
|
|
24 |
Wp = 0,1 |
|
|
25 |
Wp
= 0,2 +
|
|
|
26 |
Wp
= 2 +
|
|