

Радиотехнические цепи и сигналы. Лазаренко С.В / Презентации РТЦиС / семестр зимний / часть2 / лек16
.doc
РОСТОВСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ СЕРВИСА И ТУРИЗМА
Южно-Российский государственный университет экономики и сервиса
____________________________________________________________________
Кафедра Радиоэлектроники
Лазаренко С.В.
ЛЕКЦИЯ № 16
ФИЛЬТР ВИНЕРА
по дисциплине “Радиотехнические цепи и сигналы”
г. Ростов-на-Дону
2012 г.
ЛЕКЦИЯ 16
ФИЛЬТР ВИНЕРА
Вопросы: 1 Постановка задачи фильтрации
2 Интегральное уравнение оптимального фильтра
3 Коэффициент передачи оптимального фильтра
В данной лекции реализуются следующие элементы квалификационной характеристики:
1 Студент должен знать временные и спектральные характеристики детерминированных сигналов.
2 Студент должен уметь использовать методы спектрального и корреляционного анализа детерминированных и случайных сигналов.
3 Студент должен владеть приемами измерения основных параметров и характеристик радиотехнических цепей и сигналов.
1 ПОСТАНОВКА ЗАДАЧИ ФИЛЬТРАЦИИ
Согласованный фильтр предполагает, что сигнал полностью известен. Как уже говорилось, с его помощью решается задача обнаружения сигнала на фоне помех. Время наблюдения при этом не должно быть меньше длительности сигнала.
После обнаружения возникает задача обработки этого сигнала с целью извлечения заложенной в нем информации. Если параметры сигнала за время наблюдения не изменяются, то обработка сводится к оценке этих параметров.
Однако существует целый класс задач, в которых параметры сигнала за время наблюдения существенно меняются. В этом случае задача оценки параметров переходит в задачу фильтрации.
При решении задачи оценки, так же, как и при фильтрации предполагается, что оцениваемый или фильтруемый параметр является случайным процессом.
Например, пусть на вход приемника поступает смесь амплитудно-модулированного сигнала
![]()
и
помехи
![]() ,
т.е.
,
т.е.
![]() .
.
За
время наблюдения параметр сигнала
![]() ,
несущий информацию, изменяется
существенно. Задача приемника состоит
в наилучшем воспроизведении реализации
сигнала
,
несущий информацию, изменяется
существенно. Задача приемника состоит
в наилучшем воспроизведении реализации
сигнала
![]() .
Но это возможно с абсолютной точностью
только в отсутствие помех. В реальных
условиях приемник выдает так называемую
оценку
.
Но это возможно с абсолютной точностью
только в отсутствие помех. В реальных
условиях приемник выдает так называемую
оценку
![]() реализации сигнала, которая естественно
отличается от реализации
реализации сигнала, которая естественно
отличается от реализации
![]() .
.
Сформулируем
задачу фильтрации в следующем виде. На
вход некоторой системы (фильтра) поступает
аддитивная смесь
![]() полезного сигнала
полезного сигнала
![]() и шума (помехи)
и шума (помехи)
![]()
![]() .
.
Сигнал
и шум являются независимыми эргодическими
нормальными случайными процессами с
известными корреляционными функциями
![]() ,
,
![]() и равными нулю математическими ожиданиями.
и равными нулю математическими ожиданиями.
Желаемым выходом фильтра является, естественно, сигнал
![]() .
.
Реакцией реального фильтра является оценка сигнала, т.е.
![]() .
.
Требуется
найти характеристики реального фильтра,
выходное колебание которого
![]() отличалось бы от желаемого выхода
отличалось бы от желаемого выхода
![]() с минимальной среднеквадратической
погрешностью
с минимальной среднеквадратической
погрешностью
![]() , (1)
, (1)
где
![]() - символ усреднения.
- символ усреднения.
Так как рассматриваемые процессы эргодические, то усреднение сводится к интегрированию (низкочастотной фильтрации).
Данная постановка задачи иллюстрируется следующей структурной схемой (рисунок 1).

Рисунок 1
Задача
может ставиться несколько иначе: по
известным значениям
![]() в прошлом и настоящем дать оптимальную
оценку
в прошлом и настоящем дать оптимальную
оценку
![]() ,
т.е. в будущем.
,
т.е. в будущем.
2 ИНТЕГРАЛЬНОЕ УРАВНЕНИЕ ОПТИМАЛЬНОГО ФИЛЬТРА
Более подробно рассмотрим выражение (1). При этом учтем, что выходной сигнал искомого реального фильтра определится интегралом Дюамеля
![]() , (2)
, (2)
где
![]() - импульсная характеристика искомого
реального фильтра.
- импульсная характеристика искомого
реального фильтра.
Для нахождения этой характеристики определим квадрат ошибки
![]()
![]()
![]() . (3)
. (3)
Усредняя левую и правую части выражения (3), получим
![]()
![]() . (4)
. (4)
Учтем,
что
![]() - энергия (дисперсия) сигнала
- энергия (дисперсия) сигнала
![]() ,
,
![]() -
взаимная корреляционная функция сигнала
-
взаимная корреляционная функция сигнала
![]() и принятого сигнала (принятой реализации)
и принятого сигнала (принятой реализации)
![]() ,
,
![]() -
автокорреляционная функция принятого
сигнала.
-
автокорреляционная функция принятого
сигнала.
С учетом этого выражение (4) перепишется в виде
![]()
![]() . (5)
. (5)
Из
выражения (5) необходимо найти такую
импульсную характеристику
![]() ,
которая обеспечит минимум среднего
значения квадрата ошибки фильтрации
,
которая обеспечит минимум среднего
значения квадрата ошибки фильтрации
![]() .
Для решения этой задачи используем
методы вариационного исчисления.
.
Для решения этой задачи используем
методы вариационного исчисления.
Предположим,
что
![]() известна, и соответствующая ей ошибка
минимальна, т.е.
известна, и соответствующая ей ошибка
минимальна, т.е.
![]() .
Тогда любая другая импульсная
характеристика
.
Тогда любая другая импульсная
характеристика
![]() только увеличивает значение ошибки.
только увеличивает значение ошибки.
Пусть импульсная характеристика какого-то условного фильтра равна
![]() , (6)
, (6)
где ![]() - произвольная функция, не равная
тождественно нулю;
- произвольная функция, не равная
тождественно нулю;
![]() -
любое число.
-
любое число.
Найдем среднеквадратическую ошибку фильтрации этого условного фильтра, для чего подставим в выражение (5) соотношение (6).
![]()
![]() . (7)
. (7)
Очевидно,
что при
![]() ошибка фильтрации
ошибка фильтрации
![]() минимальна, так как в этом случае
минимальна, так как в этом случае
![]() .
.
Перепишем формулу (7) в следующем виде
![]()
![]()
![]()
![]() . (8)
. (8)
Согласно выражению (5)
![]()
![]() . (9)
. (9)
Введем обозначения
![]() , (10)
, (10)
![]() . (11)
. (11)
Подставляя соотношения (9), (10), (11) в выражение (8), получим
![]() . (12)
. (12)
Теперь
в общем случае необходимо подобрать
![]() так, чтобы минимизировать выражение
(12). Условие минимума
так, чтобы минимизировать выражение
(12). Условие минимума
![]() ,
,
откуда следует
![]() . (13)
. (13)
С
другой стороны, как было отмечено ранее,
для обеспечения минимума
![]() ,
необходимо, чтобы
,
необходимо, чтобы
![]() .
Из выражения (13) следует, что
.
Из выражения (13) следует, что
![]() .
.
Преобразуем
выражение (10) следующим образом, поменяв
порядок интегрирования и приравняв
![]()
![]() .
.
Так
как функция
![]() - произвольная функция, не равная нулю,
то, следовательно, нулю равно выражение
в квадратных скобках, откуда следует:
- произвольная функция, не равная нулю,
то, следовательно, нулю равно выражение
в квадратных скобках, откуда следует:
![]() . (14)
. (14)
Интегральное уравнение (14), называемое уравнением Винера-Хопфа, определяет оптимальную импульсную характеристику искомого фильтра.
3 КОЭФФИЦИЕНТ ПЕРЕДАЧИ ОПТИМАЛЬНОГО ФИЛЬТРА
При определении коэффициента передачи
оптимального фильтра Винера учтем
следующее обстоятельство. Взаимная
корреляционная функция
![]() сигнала
сигнала
![]() и принятого сигнала (принятой реализации)
и принятого сигнала (принятой реализации)
![]() ,
определяемая выражением (14), есть свертка
оптимальной импульсной характеристики
,
определяемая выражением (14), есть свертка
оптимальной импульсной характеристики
![]() и автокорреляционной функции
и автокорреляционной функции
![]() принятого сигнала.
принятого сигнала.
Применяя к обеим частям выражения (14) преобразование Фурье и используя свойства спектра свертки двух функций, получим
![]() , (15)
, (15)
где ![]() - взаимный энергетический спектр сигнала
- взаимный энергетический спектр сигнала
![]() и принятой реализации
и принятой реализации
![]() (смеси сигнала и шума);
(смеси сигнала и шума);
![]() -
коэффициент передачи мощности оптимального
фильтра;
-
коэффициент передачи мощности оптимального
фильтра;
![]() -
энергетический спектр принятой реализации
-
энергетический спектр принятой реализации
![]() (смеси сигнала и шума).
(смеси сигнала и шума).
Из выражения (15) следует
![]() . (16)
. (16)
Если
сигнал
![]() и помеха
и помеха
![]() не коррелированны между собой (что
практически всегда выполняется), то
не коррелированны между собой (что
практически всегда выполняется), то
![]() ,
,
![]() ,
,
где
![]() - спектральная плотность мощности помехи
(шума).
- спектральная плотность мощности помехи
(шума).
В этом случае выражение (16) приобретает вид
![]() . (17)
. (17)
Анализ выражения (17) показывает, что в случае, когда спектры сигнала и помехи не пересекаются, то коэффициент передачи мощности оптимального фильтра в пределах полосы частот, занимаемой сигналом, есть величина постоянная. Когда же спектры пересекаются, то значение коэффициента передачи меньше на тех частотах, где уровень спектральной плотности мощности шума выше. Сказанное иллюстрируется рисунками 2 и 3.

Рисунок 2
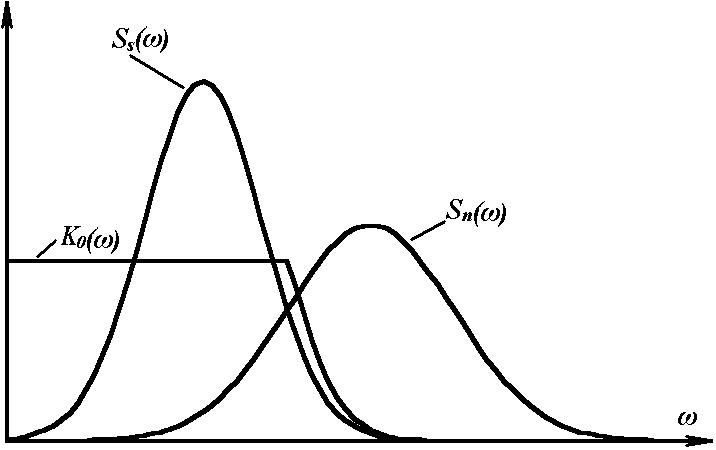
Рисунок 3
Среднеквадратическая
ошибка восстановления сигнала с помощью
оптимального фильтра определится на
основании уравнения Винера-Хопфа при
![]()
![]()
 ,
,
где
![]() и
и
![]() - нижняя и верхняя частотные границы
фильтра.
- нижняя и верхняя частотные границы
фильтра.
Лекцию подготовил старший преподаватель С. Лазаренко