

2.6. Планы скоростей и ускорений кулисного механизма
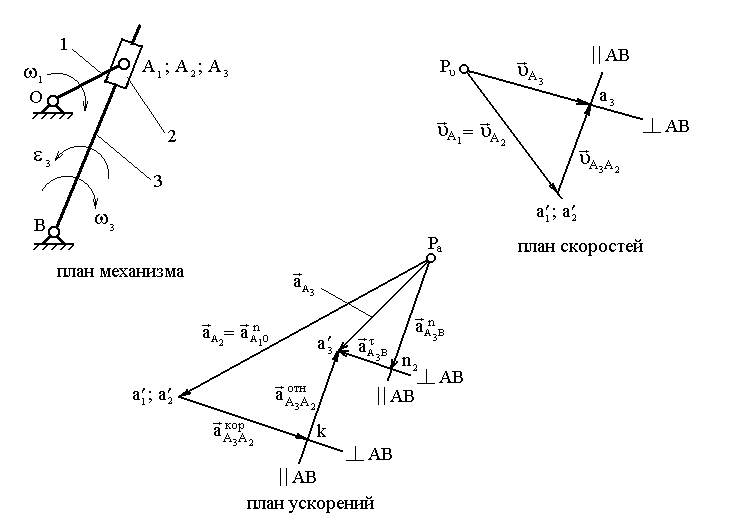
Рис. 2.5. Построение планов скоростей и ускорений кулисного механизма
Чтобы построить план скоростей, необходимо составить векторное уравнение скоростей. При этом следует иметь в виду, что точка А1, принадлежащая кривошипу 1, и точка А2, принадлежащая ползуну 2 и совпадающая на плане механизма с точкой А1, вращаются вокруг оси О с одинаковыми линейными и угловыми скоростями:
VА1
= VА2
и
![]() .
.
Если задана величина 1, то величину линейной скорости рассчитывают по формуле:
VА1 = VА2 = 1 LОА, м/с.
Векторы скоростей VА1 и VА2 направлены перпендикулярно радиусу ОА1. Скорость точки А3, принадлежащей кулисе 3, можно найти по следующему векторному уравнению скоростей:
VА3 = VА2 + VА3А2 ,
где VА3А2 – вектор скорости точки А3 кулисы относительно точки А2 ползуна; он перпендикулярен прямой А1В плана механизма.
После выбора масштаба плана скоростей v (см. предыдущие примеры механизмов) строят план скоростей в следующей последовательности.
Из
полюса Рv
(рис.2.5) перпендикулярно отрезку ОА
плана механизма, проводится вектор
скорости VА1
,
совпадающий с вектором скорости
VА2
. На рис. 2.5 это вектор
![]() .
Через точкуа1
проводится прямая, параллельная прямой
А1В,
а через полюс Рv
– прямая, перпендикулярная А1В.
На их пересечении получают точку а3
и наносят направление векторов
(“стрелки”), руководствуясь векторным
уравнением скоростей.
.
Через точкуа1
проводится прямая, параллельная прямой
А1В,
а через полюс Рv
– прямая, перпендикулярная А1В.
На их пересечении получают точку а3
и наносят направление векторов
(“стрелки”), руководствуясь векторным
уравнением скоростей.
Вычисляют величины скоростей:
![]() ,
м/с;
,
м/с;
![]() ,
м/с.
,
м/с.
где Рva3 и а1а3 – длины векторов, измеренные на плане скоростей.
Угловая скорость коромысла 3 вычисляется по формуле
![]() ,с-1.
,с-1.
Для построения плана ускорений составляются следующие векторные уравнения:
аА3 = аА2 + акорА3А2 + аотнА3А2 ,
аА3 = аВ + аnА3В + аА3В,
где аА2 – ускорение ползуна,
акорА3А2 – Кориолисово ускорение точки А3 относительно А2 (возникает тогда, когда есть относительное движение двух точек с одновременным вращением их вокруг какой-либо оси; в данном случае точка А3 движется относительно А2, и вместе они вращаются вокруг неподвижной точки В); направление вектора акорА3А2 определяется так – необходимо условно повернуть вектор скорости VА3А2 по направлению вращения кулисы 3, это и будет направление Кориолисова ускорения;
аотнА3А2 - относительное ускорение точки А3 относительно А2; его вектор параллелен А3В;
аВ - ускорение точки В; аВ = 0, так как точка В неподвижна;
аnА3В - нормальное ускорение точки А3 относительно В; направление вектора – от А3 к точке В;
аА3В - тангенциальное ускорение точки А3 относительно В; вектор направлен перпендикулярно А3В.
Вычисление величины Кориолисова и нормальных ускорений можно произвести по следующим формулам:
аА2 = аnА1О = 21 LОА, м/с2;
акорА3А2 = 23 VА3А2, м/с2;
аnА3В = 23 LА3В, м/с2.
Выбирается масштаб плана ускорений с использованием формулы
![]() ,
,
![]()
где Раа2 – длина вектора, изображающего ускорение аА2 на плане ускорений; она выбирается произвольной длины с таким расчётом, чтобы, во-первых, будущий план ускорений разместился на отведённом месте чертежа, и, во-вторых, чтобы масштаб был удобен для использования в дальнейших расчётах (был “круглым числом”).
Остальные известные величины ускорений переводятся масштабом в векторные отрезки соответствующих длин
![]() ,
мм;
,
мм;
![]() ,
мм.
,
мм.
Затем строится план ускорений в следующей последовательности.
Из
произвольно выбранного полюса – точки
Ра
– проводится вектор ускорения аnА1О
с длиной Раа2’.
Из точки а2’перпендикулярно
А2В
проводится вектор ускорения акорА3А2
с длиной
![]() .
Через точкуk
проводится прямая, перпендикулярная к
этому вектору. Таким образом, будет
выполнено графическое изображение
первого векторного уравнения ускорений
из двух ранее составленных.
.
Через точкуk
проводится прямая, перпендикулярная к
этому вектору. Таким образом, будет
выполнено графическое изображение
первого векторного уравнения ускорений
из двух ранее составленных.
Затем приступают к построению второго векторного уравнения. Из полюса Ра параллельно прямой А3В проводится вектор ускорения аnА3В длиной Раn2, и через точку n2 – перпендикулярная ему прямая до пересечения с прямой, проведённой ранее через точку k. На пересечении этих прямых получается точка а3’. Вектор, соединяющий точки Ра и а3’, есть полное ускорение аА3 точки А3.
Затем вычисляется угловое ускорение кулисы по формуле
![]() ,
с-2,
,
с-2,
где n2a3` – длина вектора, изображающего на плане ускорений тангенциальное ускорение точки А3 .
Направление углового ускорения определяется, как и в предыдущем примере (для кривошипно-ползунного механизма), то есть по направлению условного вращения кулисы 3 вектором ускорения аА3В. При этом нужно условно перенести этот вектор в точку А3 плана механизма и посмотреть, в каком направлении он будет «вращать» кулису.