

1.2 Классификация механизмов
Количество типов и видов механизмов исчисляется тысячами, поэтому классификация их необходима с целью облегчения возможности выбора того или иного механизма из большого ряда существующих, а также для проведения синтеза механизмов.
Универсальной классификации механизмов пока не существует. Наиболее распространены следующие виды классификации:
функциональная(приведена в учебнике С.Н. Кожевникова /1/), в основу которой положен принцип выполнения механизмом того или иного технологического процесса, а именно механизмы:
- приведения в движение режущего инструмента;
- питания, загрузки, съёма детали;
- транспортирования и т.д.
структурно-конструктивная, предложенная И.И.Артоболевским /2/, которая предусматривает разделение механизмов как по конструктивным особенностям, так и по структурным принципам, а именно механизмы:
- кривошипно-ползунные;
- кулисные;
- рычажно-зубчатые;
- кулачково-рычажные и т.д.
структурная; эта классификация проста, рациональна, тесно связана с образованием механизма, его строением, методами кинематического и силового анализа.
Она предложена Л.В. Ассуром в 1916 году и основана на принципе наслоения кинематических цепей (в виде структурных групп).
Согласно этой классификации любой механизм можно получить из более простого путём присоединения к последнему кинематических цепей с числом степеней свободы W = 0.
Кинематические цепи, имеющие W = 0, получили название структурных групп или групп Ассура. Недостаток этой классификации – неудобство при выборе механизма с требуемыми свойствами.
1.3. Структурные группы плоских рычажных механизмов
Условие существования структурных групп плоских рычажных механизмов описывается формулой
W = 3n - 2P5 = 0.
Так как количество подвижных звеньев механизма n и количество кинематических пар P5 – целые числа, то соответственно
![]() ,
,
откуда можно сделать вывод, что количество звеньев n в структурной группе кратно 2, или чётно.
А так как количество кинематических пар в структурной группе описывается формулой
![]() ,
,
то отсюда можно сделать вывод, что количество кинематических пар P5в структурной группекратно 3.
Примеры структурных групп приведены на рис. 1.3.
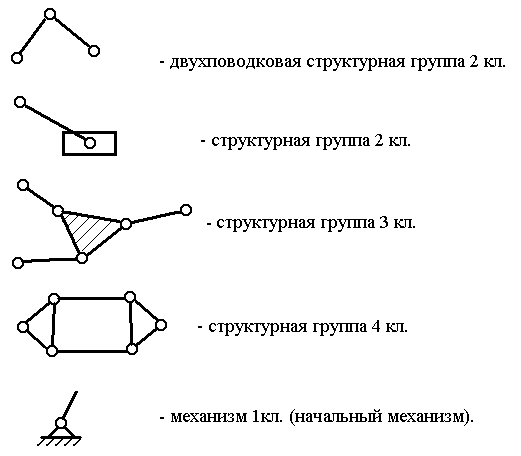
Рис .1.3. Примеры структурных групп.
При добавлении к механизму 1-го класса различных структурных групп можно получить механизм, состоящий из одной или нескольких структурных групп и механизма 1-го класса.
Механизмам, состоящим из одной или нескольких структурных групп, присваивается определённый класс. Класс механизма соответствует наивысшему классу входящих в него структурных групп. Примеры механизмов различных классов приведены на рис .1.4.
Не путать класс
механизма, класс структурной группы и
класс кинематической пары!
 Рис.
1.4. Механизмы различных классов
Рис.
1.4. Механизмы различных классов
Порядок структурной группы равен числу свободных кинематических пар, которыми она присоединяется к более простому механизму. Примеры структурных групп 1-го, 2-го и 3-го порядков приведены на рис.1.5. Здесь стрелками показаны свободные кинематические пары, которыми эти структурные группы могут подсоединяться к другим звеньям или структурным группам при синтезе механизмов.

Рис.1.5. Порядок структурных групп
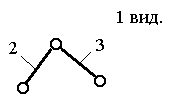
Очень широко распространены плоские рычажные механизмы, в состав которых входят структурные группы 2-го класса. Эти структурные группы подразделяют на 5 видов (модификаций). Их кинематические схемы приведены в таблице 1.1. Первый вид имеет два звена и три вращательные кинематические пары, во втором виде одна из крайних вращательных пар заменена поступательной, в третьем виде поступательной парой заменена средняя вращательная пара, в четвертом виде две крайние вращательные заменены двумя поступательными, а в пятом виде поступательными парами заменены крайняя и средняя вращательные пары. Каждый из видов этих структурных групп, будучи присоединен к начальному механизму, состоящему из стойки и кривошипа, образует определенный тип простейшего рычажного механизма: шарнирный четырехзвенник, кривошипно-ползунный, кулисный, тангенсный или синусный механизмы.
Таблица 1.1
Виды структурных групп 2-го класса
|
Кинематические схемы структурных групп 1…5 видов |
Механизмы, содержащие соответствующие структурные группы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|









Для определения класса механизма его необходимо расчленить на структурные группы, начиная с конца механизма. За начало механизма принимают ведущее звено (начальный механизм).
От конца механизма отделяются поочерёдно простейшие структурные группы до тех пор, пока не останется лишь механизм 1-го класса (начальный механизм). Причем следует иметь в виду, что начальных механизмов может быть несколько.
Класс механизма определяется по наивысшему классу входящих в него структурных групп. Количество начальных механизмов равно величине W.
На рисунке 1.6 показан пример расчленения рычажного механизма на структурные группы. Предварительно вычисляют степень подвижности механизма W по формуле:
W = 3n - 2P5 - P4..
В данном случае W = 1, а это говорит о том, что в механизме должно быть одно ведущее звено и, соответственно, один начальный механизм. Затем отделяется структурная группа 2 класса 2 вида, состоящая из звеньев 4 и 5, а за ней – структурная группа 2 класса 1 вида со звеньями 2 и 3.

Рис. 1.6. Расчленение механизма на структурные группы
Избыточные связи
В некоторых случаях при проектировании механизмов вводятся так называемые избыточные связи (дополнительные звенья) для повышения жёсткости конструкции, улучшения условий передачи сил и т.д. (рис. 1.7.)
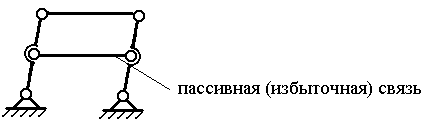
Рис. 1.7. Механизм с избыточной связью
В этом случае степень свободы вычисляется по формуле
W = 3n - 2P5 – q,
где q – число пассивных связей.
Лишние степени свободы
Лишние степени свободы, которыми обладает механизм, используются, как правило, для упрощения кинематической схемы или повышения КПД механизма.
Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3, служащий для уменьшения трения (рис. 1.8).

Рис. 1.8. Кулачковый механизм с роликовым толкателем.
В этом случае степень подвижности механизма, вычисленная по формуле П.Л. Чебышева, будет равна 2:
W = 3n - 2P5 - P4 = 3 . 3 – 2 . 3 - 1 = 2 .
Здесь явно присутствует лишняя степень свободы, а именно вращение ролика под действием силы трения качения. Её следует учитывать при проведении структурного анализа данного механизма. Ведь очевидно, что механизм может функционировать и без ролика 3. Но при этом трение качения будет заменено трением скольжения между кулачком и толкателем (то есть кулачек и толкатель образуют высшую кинематическую пару).