

5.2 Обобщенная функциональная схема мп.
МП включает в свой состав два основных устройства: операционное и управления (управляющее устройство) (рис.5.1).

Рис.5.1.
Операционное устройство (ОУ) - предназначено для выполнения операций над данными. В его состав входят: сумматор, инверторы, регистры памяти, регистры сдвига.
Устройство управления (УУ) включает в себя шифраторы, дешифраторы, счетчики тактов, программируемые логические матрицы и т.д. Оно формирует в определенной временной последовательности управляющие сигналы, под действием которых в узлах ОУ выполняются требуемые действия.
Последовательность выработки управляющих сигналов Y1...Yn – определяется кодом операции (т.е. конкретной командой), а также зависит от состояния узлов ОУ, определяемого сигналами Х1...Хs, которые характеризуют промежуточные результаты, особенным операндом и т.д. Сигналы Хs+1...XL - отражают влияние внешних сигналов на работу УУ.
Процесс работы ОУ можно представить в виде последовательности элементарных действий. Такими элементарными действиями могут быть:
- установка регистра в 0: R1 0;
- инвертирование содержимого разрядов регистра: R1 (/R1);
- пересылка содержимого одного регистра в другой: R2 (R1);
- сдвиг содержимого регистра влево, вправо;
- счет, т.е. изменение содержимого регистра на 1;
- сложение и т.д.
Микропроцессоры относятся к синхронным устройствам. Это означает, что начало и конец выполнения любой элементарной операции в МП синхронизируются импульсами специального устройства, называемого генератором синхросигналов.
Период следования синхросигналов называется машинным тактом или тактовым периодом.
Каждое элементарное действие, выполняемое в одном из узлов ОУ в течение одного тактового периода, называется микрооперацией.
В определенные тактовые периоды одновременно могут выполняться несколько микроопераций. Такая совокупность одновременно выполняемых микроопераций называется микрокомандой.
Последовательность микрокоманд, обеспечивающая выполнение операции, задаваемой кодом команды, называют микропрограммой. Т.о. если в ОУ предусматривается возможность исполнения n-различных микроопераций, то из УУ выходят n-управляющих цепей,каждая из которых соответствует определенной микрооперации (рис.5.2).

Рис.5.2
В целом УУ осуществляет: выборку из памяти команд программы в нужной последовательности, их дешифрацию; управление выполнением операций; пересылку результатов и т.д.
В МП используются два способа организации управляющего устройства:
- аппаратный;
- микропрограммный.
5.2.1 Устройство управления на основе аппаратной реализации.
Аппаратный способ управления характеризуется тем, что управляющие сигналы У1 . . . Уn формируются внутренними, т.е. реализованными на кристале МП, логическими схемами.
Упрощенная структура одного из простейших вариантов УУ приведена на рис.5.3.
На рис.5.3 приняты следующие обозначения: IR (Instruction Register)- регистр команд; PLM - программируемая логическая матрица; DC - дешифратор команд; СТ- счетчик тактов.
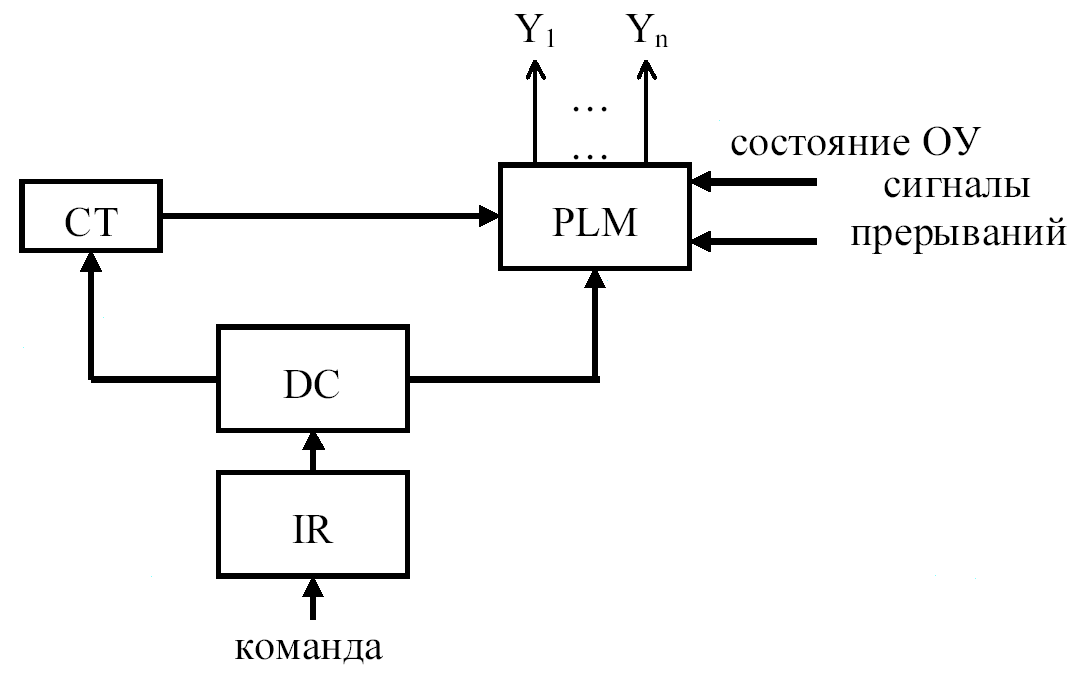
Рис.5.3
Команда, выбранная из ОЗУ, записывается в регистр команд (IR) и хранится в нем в течение всего времени выполнения команды.
С помощью DC КОП расшифровывается, при этом среди прочей информации определяется и число тактов, в течение которых должна быть выполнена данная команда. Указанное число загружается в счетчик тактов (СТ), который работает на вычитание. По достижении нуля счетчик останавливается, пройдя таким образом требуемое число состояний, равное числу тактов в команде.
Основным узлом рассматриваемого устройства является PLM, на которую в качестве входной информации подаются:
- информация непосредственно с DC, которая характеризует данную выполняемую команду;
- изменяющаяся в каждом такте информация со счетчиков;
- сигналы состояния операционного устройства;
- сигналы о прерываниях.
Т.о. в каждом такте на PLM поступает такая совокупность входных сигналов, которая необходима и достаточна для однозначного определения всех выходных управляющих сигналов в каждом такте выполняемой команды. Совокупность выходных сигналов PLM и является сигналами управления МП.