

4. Элементы автоматики
План лекции
Введение.
4.1. Общие представления об элементах системы управления.
4.2 Датчики.
4.3. Исполнительные устройства.
Заключение.
4.1. Общие представления об элементах системы управления.
Любой элемент автоматики может быть представлен в виде двухполюсника.Он конструктивно обособлен и выплняет заданную функцию.Связь между выходной и входной величиной математически описывается с помощью оператора преобразования:- Y=LX. Если элемент представляет собой безинерционное звено, то оператор преобразования выраждается в функцию преобразования. Элемент автоматики, как звено электроавтоматики характеризуется набором динамических и статических характеристик.
К ДИНАМИЧЕСКИМ характеристикам относятся:
- постоянные времени. Они определяют время переходного процесса,т.е. инерционность элемента;
- перерегулирование;
- полоса пропусканий.
К СТАТИЧЕСКИМ характеристикам относятся:
- коэффициент преобразования;
- погрешность;
- зона нечувствительности или порог чувствительности.
КОЭФФИЦИЕНТ ПРЕОБРАЗОВАНИЯ- это есть отношение выходной величины к входной величине в установившемся режиме.
Кп=Y/X= Y/ X
В зависимости от назначения элемента Кп, его называют: коэффииент усиления, коэффициент стабилизации, чувствительность.
ПОГРЕШНОСТЬ - это отклонение выходной величины от требуемого значения, при неизменной входной величине. Она, как правило связана с изменением свойств внутренних элементов, при изменении условий эксплуотации. В зависимости от причин, вызывающих погрешность, ее называют: температурная, частотная, параметрическая нестабильность. Различают абсолютную и относительную погрешность.
ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ- это такое абсолютное значение входного сигнала, которое не приводит к изменению выходной величины. Зоной нечувствительности являются шумы. Основным требованием предъявляемым к статической функции преобразования элементов автоматики
используемых в системе управления является ЛИНЕЙНОСТЬ.
4.2 Датчики.
Датчики предназначены для преобразования контролируемой величины в электрический сигнал, удобный для дистанционной передачи и дальнейшей обработки. Датчик состоит из двух элементов:
-чувствительный;
-преобразовательный.
ПРЕОБРАЗОВАТЕЛЬ обеспечивает преобразование зафиксируемое контролируемой величины, в параметр электрической величины и в ЭДС. В первом случае, датчик называется ПАРАМЕТРИЧЕСКИМ, а во втоом случае ГЕНЕРАТОРНЫМ. В качестве параметров цепи,используется активное сопротивление, индуктивность, емкость. Для измерения системы перемещений в станках с ЧПУ используются: фотоимпульсные и индуктивные датчики кругового и линейного типа. В фотоимпульсных датчиках, как правило генерируется два вида информационных сигналов:
-основной;
-смещенный.
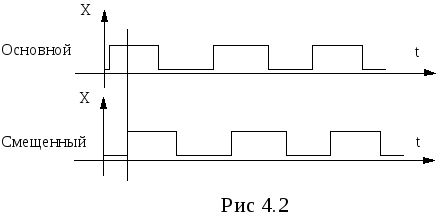
Смещенный сдвинут по фазе относительно основного на 90 градусов. В датчиках кругового типа этот сигнал определяет полный оборот датчика в линейных датчиках, он задает границы перемещений. В датчике типа ВЕ-178 основной и смещенный сигналы соответствуют 2500 импульсам на оборот датчика. Для повышения надежности и создание возможности проерки работоспособности датчиков, к трем основным сигналам, перечисленным выше добавляется три инверсных им сигнала.
Для повышения разрешающей способности датчиков при преобразовании их сигнала используется принцип умножения команд;позволяет увеличить разрешающую способность в 2-4 раза. Виндуктивных датчиках как правило для измерения перемещения используется сдвиг фаз между основной частотой и частотой выходного сигнала. В качестве индуктивных датчиков в СЧПУ используются трансформаторы и сельсины.
Uвых=Uа() ·Sin(t + )
Uа=Umax ·Sin(t)
где - частота питающего датчик напряжение;
- угол поворота.
В сельсинах используют .
Разрешающая способность такого датчика зависит от частоты питающего напряжения () , от точности работы схемы выделения фазы и от частоты импульсов, заполняющих фазу. Усилители предназначены для усиления по мощности.
Усилители предназначены для усиления команд управления по мощности. Оптронная развязка кроме функций усиления выполняет задачи гальванической развязки выходной и входной цепи.
R=(Eвх-Ug)/Iр.g. Ug=2-2.5
Iр.g. > 5mA
R=(Eпк-U)/Iтр Iтр=2-5mA
4.3. Исполнительные устройства.
Тип исполнительных устройств определяется типом преобразуемой в ней энергии:
- злектрическая;
-гидравлическая;
-пневмотическая и т.д.
В качестве электромеханических приводов станках используются комплект
ные приводы с ДПТ, или высокомоментные двигатели, а также с ассинхронными двигателями. Кроме этого используется разомкнутый контур управления с применением шагового двигателя. ШД-5: 6 обмоток на статоре. Чередование включения фаз статора обеспечивает вращение ротора. Это чередование фаз реализуется с помощью специальных схем управления, называемые электронными комутаторами. Если под напряжением находятся две или три обмотки , то вал ротора зафиксирован и может выдержать в тормозном режиме крутящий момент , равный номинальному. Частота вращения выходного вала ШД пропорциональна частоте импульсовпоступающий на электрический комутатор. Угол поворота соответствующий 1 импульсу , поступающему на комутатор равен 45 градусов.