Примерные задания на курсовой проект / Зад КП / Kurs_04
.doc|
Окончание
|
|
|
ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ |
ТММ |
||||||||||||||||||||
|
|
|
Задание на КП «Поперечно-строгальный станок» |
ТММ – 4 |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||||||||||||||||
|
Редуктор |
||||||||||||||||||||||||
|
Модуль непланетарной ступени |
|
мм |
5 |
6 |
4 |
7 |
6 |
5 |
||||||||||||||||
|
Число зубьев колес |
|
__ |
15 |
12 |
14 |
17 |
19 |
15 |
||||||||||||||||
|
|
|
__ |
20 |
16 |
18 |
21 |
23 |
20 |
||||||||||||||||
|
Модуль планетарной ступени |
|
мм |
4 |
6 |
3 |
5 |
4 |
3 |
||||||||||||||||
|
При выполнении расчетов необходимо:
Задания составили: Т. Л. Залесская Л. П. Полосатов
|
||||||||||||||||||||||||
|
Дата выдачи проекта |
|
Ф. И. О. консультанта |
|
|||||||||||||||||||||
|
Группа |
|
Ф. И. О. студента |
|
|||||||||||||||||||||
|
Дата защиты проекта |
|
Состав комиссии и подписи |
|
|||||||||||||||||||||
|
Оценка |
|
|||||||||||||||||||||||
|
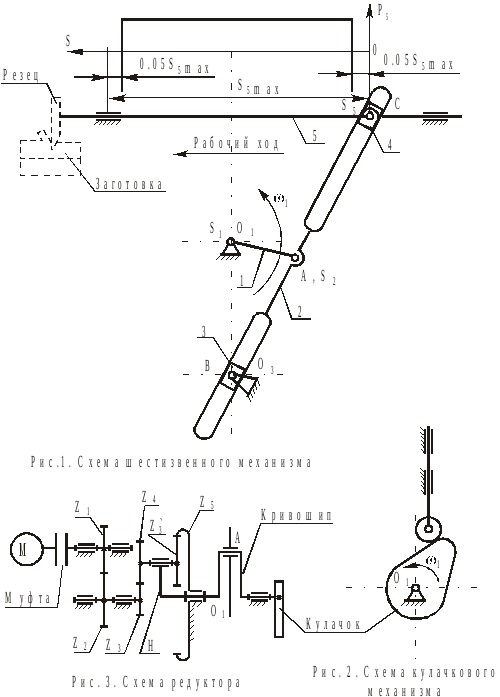
Описание механизмов поперечно-строгального станка
Поперечно-строгальные станки предназначены для обработки поверхностей малогабаритных деталей. Строгальный резец получает возвратно-поступательное движение от кулисного шестизвенного механизма, схема которого приведена на рис.1 . Цикл работы станка состоит из рабочего и холостого ходов. Кулисный шестизвенный механизм позволяет увеличить производительность за счет уменьшения времени холостого хода. Движение подачи заготовки осуществляется при холостом ходе резца с помощью кулачкового механизма (рис.2). Ведущее звено - кривошип 1 приводится в движение электродвигателем Μ через редуктор, состоящий из планетарной и непланетарной ступеней (рис.3).
При выполнении задания необходимо:
|
|
|
Исходные данные
|
|||||||||||||||||||||
|
Наименование параметра |
Обозначе-ние |
Раз-мер-ность |
Числовые значения для вариантов |
|||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||||||||||||||||
|
Частота вращения электродвигателя |
|
Об/мин |
900 |
970 |
1350 |
1400 |
I500 |
960 |
||||||||||||||||
|
Частота вращения вала кривошипа |
|
|
100 |
97 |
120 |
160 |
175 |
100 |
||||||||||||||||
|
Шестизвенный механизм |
||||||||||||||||||||||||
|
Ход ползуна 5 |
|
м |
0,35 |
0,4 |
0,4 |
0,4 |
0,45 |
0,4 |
||||||||||||||||
|
Отношение ср. скоростей холостого и рабочего ходов |
|
__ |
1,8 |
1,9 |
2,0 |
1,9 |
1,8 |
2,0 |
||||||||||||||||
|
|
||||||||||||||||||||||||
|
Масса кулисы |
|
кг |
40 |
30 |
20 |
25 |
35 |
30 |
||||||||||||||||
|
Момент инерции кулисы |
|
кгм2 |
0,6 |
0,5 |
0,4 |
0,65 |
0,4 |
0,5 |
||||||||||||||||
|
Масса ползуна |
|
кг |
75 |
100 |
100 |
150 |
100 |
75 |
||||||||||||||||
|
Усилие резания |
|
Н |
2500 |
3000 |
2800 |
3200 |
3500 |
1000 |
||||||||||||||||
|
Коэффициент неравномерности хода |
|
__ |
0,1 |
0,12 |
0,15 |
0,14 |
0,12 |
0,1 |
||||||||||||||||
|
Кулачковый механизм |
||||||||||||||||||||||||
|
Закон движения коромысла |
Фаза подъёма |
|
___ |
Синусоид. |
Пост. ускор. |
Линейный |
Линейный |
Синусоид. |
Пост. ускор. |
|||||||||||||||
|
Фаза опускания |
|
__ |
Линейный |
Синусоид. |
Пост. ускор. |
Синусоид. |
Линейный |
Синусоид. |
||||||||||||||||
|
Допускаемый угол давления |
|
град |
25 |
30 |
35 |
25 |
20 |
30 |
||||||||||||||||
|
Ход толкателя |
|
мм |
60 |
75 |
50 |
50 |
40 |
75 |
||||||||||||||||
|
Фазовые углы |
Подъем |
|
|
120 |
144 |
120 |
160 |
180 |
150 |
|||||||||||||||
|
|
Опускание |
|
град |
150 |
144 |
180 |
160 |
180 |
160 |
|||||||||||||||
|
|
Верхний выстой |
|
|
0 |
72 |
0 |
40 |
0 |
0 |
|||||||||||||||