Примерные задания на курсовой проект / Зад КП / Kurs_03
.doc|
Окончание
|
|
|
ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ |
ТММ |
||||||||||||||||||||
|
|
|
Задание на КП «Долбежный станок» |
ТММ – 3 |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||||||||||||||||
|
Редуктор |
||||||||||||||||||||||||
|
Модуль непланетарной ступени |
|
мм |
4 |
5 |
6 |
7 |
5 |
7 |
||||||||||||||||
|
Число зубьев колес |
|
__ |
10 |
12 |
13 |
14 |
15 |
12 |
||||||||||||||||
|
|
|
__ |
30 |
18 |
26 |
14 |
30 |
24 |
||||||||||||||||
|
Модуль планетарной ступени |
|
мм |
3 |
4 |
4 |
5 |
4 |
6 |
||||||||||||||||
|
При выполнении расчетов необходимо:
Задания составили: Т. Л. Залесская Л. П. Полосатов
|
||||||||||||||||||||||||
|
Дата выдачи проекта |
|
Ф. И. О. консультанта |
|
|||||||||||||||||||||
|
Группа |
|
Ф. И. О. студента |
|
|||||||||||||||||||||
|
Дата защиты проекта |
|
Состав комиссии и подписи |
|
|||||||||||||||||||||
|
Оценка |
|
|||||||||||||||||||||||
|
Описание механизмов долбежного станка
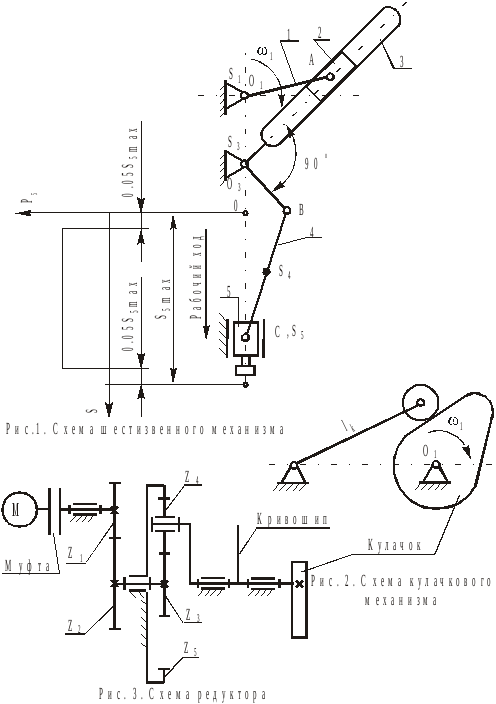
Долбёжные станки предназначены для обработки вертикальных плоскостей, канавок, фасонных поверхностей. Резец приводится в движение шестизвенным механизмом, схема которого представлена на рис. 1. Кривошип 1 получает вращательное движение от электродвигателя М через редуктор, имеющий планетарную и непланетарную ступени. Схема редуктора представлена на рис. 3 . Кулисный механизм в главном приводе позволяет иметь скорость обратного хода в 2-3 раза выше скорости рабочего ходя. Подача стола с заготовкой осуществляется с помощью кулачкового механизма, схема которого показана на рис. 2.
При выполнении задания необходимо:
|
|
|
Исходные данные |
|||||||||||||||||||||
|
Наименование параметра |
Обозначе-ние |
Раз-мер-ность |
Числовые значения для вариантов |
|||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||||||||||||||||
|
Частота вращения электродвигателя |
|
Об/мин |
740 |
960 |
980 |
1450 |
970 |
1470 |
||||||||||||||||
|
Частота вращения вала кривошипа |
|
|
50 |
96 |
100 |
200 |
60 |
110 |
||||||||||||||||
|
Шестизвенный механизм |
||||||||||||||||||||||||
|
Ход ползуна 5 |
|
м |
0,2 |
0,3 |
0,4 |
0,35 |
0,25 |
0,4 |
||||||||||||||||
|
Отношение ср. скоростей холостого и рабочего ходов |
|
__ |
2 |
2,4 |
2,5 |
1,5 |
1,6 |
2 |
||||||||||||||||
|
Длина кривошипа |
|
м |
0,3 |
0,35 |
0,25 |
0,3 |
0,28 |
0,26 |
||||||||||||||||
|
Отношение |
|
__ |
1,6 |
2,8 |
2,5 |
2,4 |
2,6 |
2,5 |
||||||||||||||||
|
Момент инерции кулисы |
|
кгм2 |
2,5 |
3 |
3,2 |
3,5 |
4 |
4 |
||||||||||||||||
|
Масса ползуна |
|
кг |
30 |
45 |
35 |
46 |
60 |
70 |
||||||||||||||||
|
Усилие резания |
|
Н |
1000 |
1500 |
1200 |
2000 |
1800 |
1600 |
||||||||||||||||
|
Коэффициент неравномерности хода |
|
__ |
0,1 |
0,12 |
0,15 |
0,14 |
0,12 |
0,1 |
||||||||||||||||
|
Кулачковый механизм |
||||||||||||||||||||||||
|
Закон движения коромысла |
Фаза подъёма |
|
___ |
Пост. ускор. |
Коси-нус. |
Линейный |
Пост. ускор. |
Синусоид. |
Пост. ускор. |
|||||||||||||||
|
Фаза опускания |
|
__ |
Линейный |
Синусоид. |
Линейный |
Пост. ускор |
Синусоид. |
Коси-нус. |
||||||||||||||||
|
Допускаемый угол давления |
|
град |
30 |
25 |
20 |
25 |
30 |
20 |
||||||||||||||||
|
Угол размаха коромысла |
|
|
35 |
40 |
35 |
40 |
35 |
30 |
||||||||||||||||
|
Длина коромысла |
|
мм |
120 |
150 |
140 |
160 |
120 |
110 |
||||||||||||||||
|
Фазовые углы |
Подъем |
|
|
180 |
150 |
120 |
90 |
120 |
180 |
|||||||||||||||
|
|
Опускание |
|
град |
180 |
150 |
150 |
90 |
120 |
150 |
|||||||||||||||
|
|
Верхний выстой |
|
|
0 |
30 |
30 |
90 |
90 |
30 |
|||||||||||||||