Примерные задания на курсовой проект / Зад КП / Kurs_17
.doc|
Окончание табл. 1
|
|
|
ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ |
ТММ |
|||||||||||||||||||||||||
|
|
|
Задание на КП «Долбёжный станок» |
ТММ – 17 |
||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||||||||||||||||||
|
Кулачковый механизм |
|||||||||||||||||||||||||||||
|
Длина коромысла |
|
мм |
125 |
140 |
160 |
150 |
130 |
160 |
|||||||||||||||||||||
|
Угол качания коромысла |
|
|
15 |
14 |
15 |
16 |
17 |
18 |
|||||||||||||||||||||
|
Фазовые углы |
Подъём |
|
|
120 |
90 |
150 |
180 |
150 |
120 |
||||||||||||||||||||
|
Верхний выстой |
|
град |
30 |
45 |
30 |
0 |
60 |
60 |
|||||||||||||||||||||
|
Опускание |
|
|
90 |
135 |
120 |
120 |
120 |
120 |
|||||||||||||||||||||
|
Допускаемый угол давления |
|
|
40 |
||||||||||||||||||||||||||
|
Закон движе-ния толка-теля |
При подъ-ёме |
|
___ |
Пост. |
Лин. |
Син. |
Кос. |
Пост. |
Лин. |
||||||||||||||||||||
|
При пускании |
|
__ |
Син. |
Кос. |
Лин. |
Пост. |
Син. |
Кос. |
|||||||||||||||||||||
|
Примечания:
Задания составили: Т. Л. Залесская
|
|||||||||||||||||||||||||||||
|
Дата выдачи проекта |
|
Ф. И. О. консультанта |
|
||||||||||||||||||||||||||
|
Группа |
|
Ф. И. О. студента |
|
||||||||||||||||||||||||||
|
Дата защиты проекта |
|
Состав комиссии и подписи |
|
||||||||||||||||||||||||||
|
Оценка |
|
||||||||||||||||||||||||||||
|
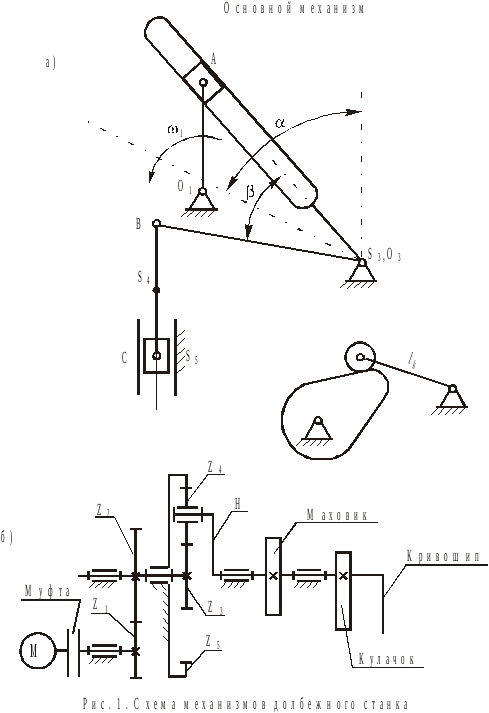
ОПИСАНИЕ РАБОТЫ СТАНКА
Долбежные станки предназначены для обработки плоских и фасонных поверхностей резцом. Резец закрепляется в ползуне, который движется возвратно-поступательно в вертикальном направлении (рис.1,а). Обрабатываемая деталь устанавливается на горизонтальном столе, который имеет продольное, поперечное и круговое перемещения. Величина хода ползуна (а следовательно и резца) изменяется за счет изменения длины кривошипа. На рис.1 показана кинематическая схема станка. Возвратно-поступательное движение ползуну 5 сообщает шестизвенный кулисный механизм. Все механизмы станка приводятся в движение от электродвигателя через передаточный механизм, состоящий из планетарной передачи и передачи с неподвижными осями (рис.1,6).
При выполнении задания необходимо:
|
|
|
Исходные данные |
||||||||||||||||||||||||||
|
Наименование параметра |
Обозначе-ние |
Раз-мер-ность |
Числовые значения для вариантов |
||||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||||||||||||||||||
|
Частота вращения валов |
двигателя |
|
Об/мин |
750 |
750 |
750 |
1000 |
1000 |
1000 |
||||||||||||||||||||
|
кривошипа |
|
|
60 |
50 |
70 |
90 |
80 |
75 |
|||||||||||||||||||||
|
Шестизвенный механизм |
|||||||||||||||||||||||||||||
|
Коэффициент изменения скорости |
|
__ |
1,8 |
2,0 |
1,7 |
1,9 |
1,8 |
1,6 |
|||||||||||||||||||||
|
Конструктивные параметры |
|
|
0,40 |
0,42 |
0,45 |
0,048 |
0,50 |
0,45 |
|||||||||||||||||||||
|
|
м |
2,5 |
2,2 |
||||||||||||||||||||||||||
|
|
|
3 |
3,2 |
||||||||||||||||||||||||||
|
|
град |
60 |
45 |
||||||||||||||||||||||||||
|
|
|
30 |
45 |
||||||||||||||||||||||||||
|
Массы звеньев |
|
|
40 |
45 |
50 |
55 |
60 |
60 |
|||||||||||||||||||||
|
|
кг |
15 |
20 |
25 |
30 |
25 |
30 |
||||||||||||||||||||||
|
|
|
20 |
25 |
30 |
30 |
40 |
50 |
||||||||||||||||||||||
|
Моменты инерции звеньев |
|
кгм2 |
1,0 |
1,2 |
1,2 |
1,4 |
1,5 |
1,6 |
|||||||||||||||||||||
|
|
|
0,6 |
0,7 |
0,6 |
0,8 |
0,8 |
0,8 |
||||||||||||||||||||||
|
Усилие резания |
|
кН |
1200 |
1300 |
1400 |
1500 |
1800 |
2000 |
|||||||||||||||||||||
|
Коэффициент неравномерности |
|
__ |
1/25 |
1/30 |
1/35 |
1/35 |
1/40 |
1/40 |
|||||||||||||||||||||
|
Редуктор |
|||||||||||||||||||||||||||||
|
Числа зубьев |
|
__ |
13 |
12 |
14 |
||||||||||||||||||||||||
|
|
__ |
19 |
17 |
18 |
20 |
19 |
18 |
||||||||||||||||||||||
|
Моду-ли |
непланетарной ступени |
|
мм |
4 |
3 |
5 |
4 |
||||||||||||||||||||||
|
планетарной ступени |
|
|
4 |
5 |
3 |
||||||||||||||||||||||||