

Вращательное движение тела
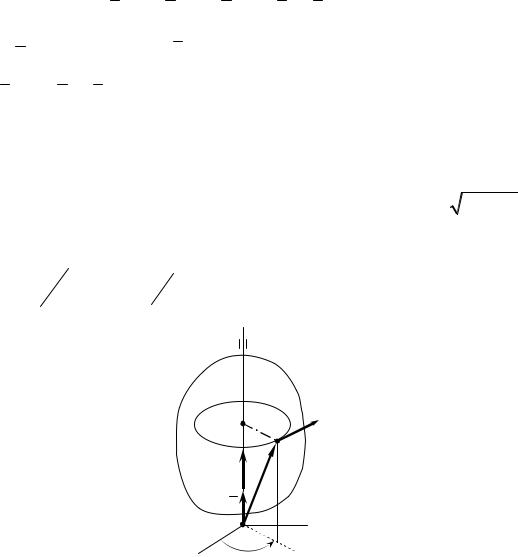
Движение тела относительно данной системы отсчёта называется вращательным, если две его точки неподвижны относительно этой системы отсчёта. Прямая, соединяющая эти точки, называется осью вращения. Положение тела при вращении определяется углом поворота ϕ между непод-
вижной плоскостью (напримерxAz ) и плоскостьюx1 Az , жёстко связанной с телом (рис.1.5). Уравнение вращательного движения имеют вид зависимости угла поворота от времени
ϕ =ϕ (t).
Величина, характеризующая быстроту изменения угла поворота, называется угловой скоростью, которая характеризуется не только величиной, но и направлением вращения. Угловая скорость равна производной от угла поворота по времени:
ω =ϕ k =ω k .
Угловое ускорение характеризует быстроту изменения угловой скорости и равно
ε =ω =ω k =ϕ k .
Вектор углового ускорения направлен вдоль оси вращения. Направления ε и ω совпадают, если совпадают знаки первой и второй производных от угла вращения по времени.
Все точки вращающегося тела описывают при движении окружности с радиусамиh , равными расстояниям от соответствующих точек до оси вращения и движение точки можно считать заданным естественным спо-
собом: s = s (t)= h ϕ (t).
Скорость точки может быть определена по формуле Эйлера (рис.1.5). v = r =ω ×r , v = s = h ϕ = h ω =ω r sin (rn,ω).
15
Ускорение точки тела при вращательном движении равно a =ε ×r +ω ×v =ε ×r +ω ×(ω ×r )= aτ + an ,
гдеaτ =ε ×r , aτ =ε r sin(rn,k ) =ε h — касательное ускорение точки;
аan =ω ×v =ω ×(ω ×r ), an =ω v sin (π 2)=ω2 h — нормальное ускорение. Часто составляющую aτ называют вращательным ускорением, со-
2)=ω2 h — нормальное ускорение. Часто составляющую aτ называют вращательным ускорением, со-
ставляющую an — центростремительным.
Модуль полного ускорения определится формулой a = h ε2 +ω4 .
Угол наклона полного ускорения к направлению главной нормали
α = arctg aτ an = arctg (ε ω2 )не зависит от выбора точки.
z
B
ε 
o |
h |
v |
|
M
ω r
k
y
A 

x ϕ x1
Рис. 1. 5. Вращательное движение твердого тела вокруг неподвижной оси
Из приведённых формул видно, что:
•скорость и ускорение точки тела при вращательном движении пропорциональны расстояниям до оси вращения,
•скорость точки перпендикулярна к радиусу окружности;
•ускорение точки отклонено от радиуса окружности на угол α не зависящего от выбора самой точки.
16