

новления, колебательное движение определяется только действием возмущающей силы и движение называется установившимися колебаниями.
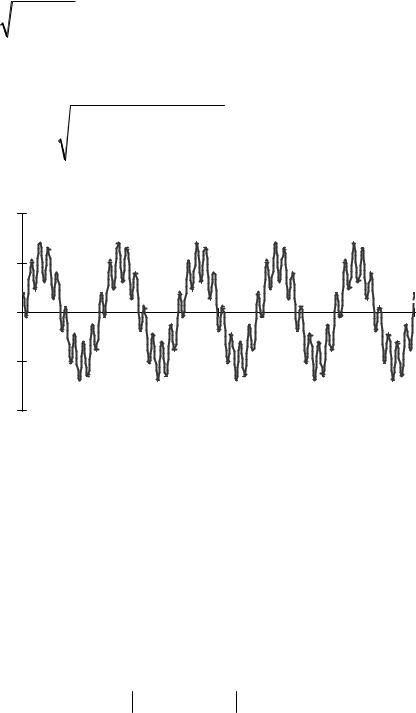
При отсутствии сопротивления ν = 0 закон колебательного движения, при выполнении условияk ≠ p , будет иметь вид (рис. 3. 14)
q = A0 sin (k t +α0 )+ B0 sin (pt +ϕ − β0 ),
гдеB0 |
= B |
1 |
|
|
|
= B |
1 |
|
|
|
|
|
|
0 при z <1 |
, а константы A0 и α0 оп- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
, β0 = |
|
при z >1 |
||||||||||||||||||
( |
|
|
) |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
2 |
2 |
|
|
|
1− z2 |
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
1− z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ределяются из начальных условий: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
= |
|
q 2 |
+ |
|
q0 |
|
− |
|
b z |
|
|
, |
α |
|
= arctg |
|
|
|
q0 |
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
q |
|
b z |
|
|||||||||||||||||
|
|
0 |
|
|
0 |
|
|
|
|
|
2 |
|
|
|
0 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
k |
|
1− z |
|
|
|
|
|
|
|
|
0 |
− |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
1 |
− z2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
q |
t |
Рис. 3. 14 Вынужденные незатухающие колебания. |
Типичный график вынужденных колебаний при отсутствии сопротивления изображен на рис. 3. 14.
ИССЛЕДОВАНИЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
Для дальнейшего исследования вынужденных колебаний, с целью упрощения преобразований, можно, не нарушая общности, принять нулевые начальные условия:
q t=0 = q0 ≡ 0, q t=0 = q0 ≡ 0 .
125
Уравнение вынужденных колебаний в этом случае примет вид
|
|
q = A0 e−nt sin (k′t +α0 )+ B0 sin (pt +ϕ − β0 ), |
|
|
||||||||||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2νz |
|
|
|
|
|||
|
B0 = B |
|
|
|
|
|
|
|
|
|
|
|
|
; |
β0 = arctg |
|
|
|
|
, |
|
|||||||
|
|
( |
|
|
) |
|
|
|
|
|
|
|
|
2 |
|
|||||||||||||
|
|
|
|
|
|
|
2 |
2 |
|
|
2 |
|
2 |
|
|
|
|
1− z |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1− z |
|
+ |
4ν |
z |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A |
= |
B |
2 |
+ |
1 |
|
(ν |
B |
+ z B ) |
2 |
, α |
|
= arctg |
B |
|
1−ν2 |
. |
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||||||
|
1−ν2 |
|
|
ν B |
|
+ z B |
||||||||||||||||||||||
0 |
|
2 |
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
Резонанс
Явление, возникающее при совпадении частот вынужденных и свободных колебаний механической системы, называется резонансом. В этом случае значение коэффициента расстройки z =1. Уравнение движения, сдвиг фазы и амплитуда вынужденных колебаний определяются равенством
|
|
|
|
|
q = A0 e−nt sin (k′t +α0 )+ B0 sin (pt +ϕ − β0 ), |
|||||||||||
где B |
= B |
1 |
, |
β |
|
= |
π |
, |
A = |
B |
1 |
, α |
|
= arctg |
1−ν2 |
. |
2ν |
|
2 |
2 ν |
1−ν2 |
|
|
||||||||||
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
ν |
|
||||
|
|
q |
|
n ≠ 0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
Рис. 3. 15 Резонансные колебания при наличии сопротивления. |
||||||||||||||
Здесь, при наличии сопротивления движению и любом значении коэффициента демпфированияν ≠ 0 , амплитуда вынужденных колебаний ос-
126
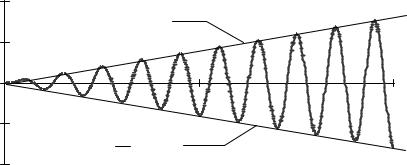
тается конечной величиной. График такого движения представлен на |
|||
рис. 3. 15. |
|
|
|
При отсутствии сопротивления ν = 0 уравнение колебаний теряет |
|||
физический смысл, т.к. амплитуда вынужденных колебаний становится |
|||
равной бесконечности. Для получения уравнения, описывающего явление |
|||
резонанса при отсутствии сопротивления, разложим величину e−nt в ряд по |
|||
степеням n и перейдем к пределу приn → 0 , z →1. |
|||
q |
n = 0 |
1 |
B k t |
|
|||
|
|
2 |
|
|
|
|
t |
|
|
− |
1 B k t |
|
|
|
2 |
Рис. 3. 16 Резонансные колебания при отсутствии сопротивления. |
|||
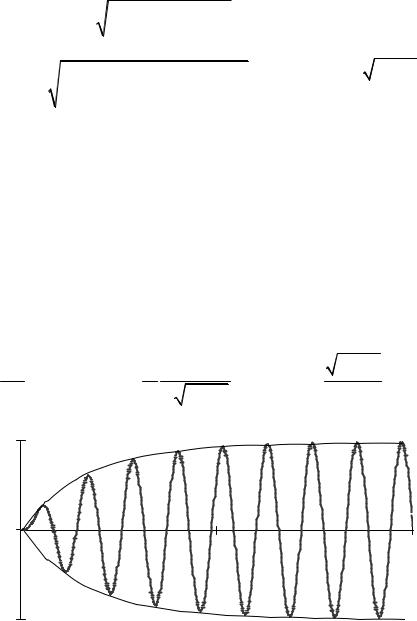
Уравнение движения примет вид: |
|
|
|||
q (t)= |
B k |
|
π |
||
|
t sin kt +ϕ − |
|
. |
||
2 |
2 |
||||
|
|
|
|||
Данное выражение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Частота и период вынужденных колебаний при резонансе и отсутствии сопротивления равны частоте и периоду свободных колебаний механической системы (см. рис. 3. 16).
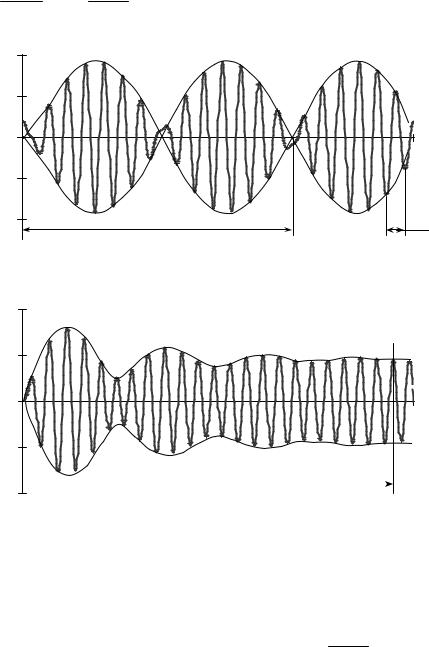
Биения.
При частоте возмущающей силы, близкой к частоте свободных колебаний, наступает явление, называемое биениями.
Особенно ярко это явление проявляется при отсутствии сопротивления движению (см. рис. 3. 17), т. е. при n = 0 иz ≈1. В этом случае получим
q (t)= B (t) cos(p t +ϕ),
127
гдеB (t)= |
|
2 B |
|
|
p −k |
|
|
1 |
− z |
2 |
sin |
2 |
t . |
|
|
|
|
|
|
|
|||
|
|
q |
|
|
|
n = 0 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
τ |
T |
|
|
|
|
Рис. 3. 17 Биения при отсутствие сопротивления. |
|||
|
|
q |
|
|
|
n ≠ 0, |
n = ε ≈ 0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
t y |
|
|
|
|
|
Рис. 3. 18 Биения при наличии сопротивления. |
|||
Движение, определяемые данным уравнением, можно рассматривать как колебания частоты p и периодаT = 2π  p , амплитуда которых B (t)
p , амплитуда которых B (t)
является периодической функцией с периодомτ = p4−πk . Так как p ≈ k , то
период τ велик по сравнению с периодом вынужденных колебанийT . Аналогичное явление можно получить и при наличии сопротивления
движению (см. рис. 3. 18), в том случае, если коэффициент сопротивления n достаточно мал.
128