

Лекция 4 4 часа
Исполнительные механизмы (сервоприводы)
Исполнительные механизмы, или сервоприводы, состоят из цепи усилителя, переключателя и исполнительного устройства и предназначены для усиления слабого управляющего сигнала от регулятора или блока сравнения (доли ватт) до мощности, необходимой для воздействия на объект управления (до нескольких киловатт), возможно, с преобразованием сигнала в другую форму и передачи его на исполнительное устройство, воздействующее через рабочий орган на объект управления. Хотя для анализа системы управления удобно представлять привод совокупностью типовых элементов, однако конструктивно — это, как правило, единое устройство, для которого указан вид и уровень входного и выходного параметров.
Приводы по виду выходного параметра делятся на силовые и параметрические.
Силовые приводы создают на выходе силу или момент, которые обычно фиксируют положение рабочего органа (РО). Силовые приводы строят на базе электромагнитов, электромеханических муфт и различного вида двигателей.
Параметрические приводы предназначены для изменения состояния РО:
параметров самого РО (положения, скорости, температуры, электрического сопротивления);параметров энергии, подводимой к РО (напряжения, ток; частоты, фазы в случае электрических устройств, давления газ или масла в пневмо- или гидросистемах).
Например, в системе управления температурой электропечи регулируемым параметром является температура в печи, исполнительным механизмом — усилитель, с выхода которого электроэнергия подается на регулирующий орган — нагревательный элемент печи. Температура в печи сравнивается с заданной. По результату сравнения в регуляторе вычисляется требуемое изменение напряжения на нагревательном элементе, которое и воспроизводится усилителем.
Основными техническими показателями приводов являются:
• быстродействие;
• точность;
• диапазон линейного или углового перемещения рабочего органа;
• частота вращения;
• максимальная полезная мощность;
" максимальная и номинальная нагрузка;
• коэффициент усиления по мощности;
• мощность управления;
• КПД (приводы являются основным потребителем энергии в системе управления);
• ресурс работы и т.д.
В конкретных случаях разные факторы играют определяющую роль при выборе исполнительного механизма.
Сервоприводы делят на приводы с поступательным и вращательным движением. Приводы с вращательным движением в свою очередь делят на приводы с постоянной и с пропорциональной скоростью. В последнем случае скорость вращения двигателя пропорциональна входному параметру.
Сервопривод использует один или несколько сторонних источников питания (электросеть, пневмосеть). Обычно стремятся построить привод на элементах, использующих сигналы одной формы: электропривод, гидропривод, пневмопривод. Однако это не всегда удается, поэтому широко распространены комбинированные приводы — электрогидравлические, электропневматические и пневмогидравлические. Примером комбинированного привода является электрогидравлический привод станка с ЧПУ.
В состав привода входят:
электронный цифровой блок управления обмотками шагового двигателя для обеспечения заданных направления и скорости вращения;
маломощный шаговый электродвигатель, преобразующий управляющие импульсы в угол поворота ротора;
гидроусилитель (следящий гидропривод), воспроизводящий угол поворота, но с мощностью, достаточной для перемещения суппорта.
Примером электропневмопривода является привод, в состав которого входит усилитель постоянного тока, усиливающий сигнал с регулятора до мощности, достаточной для срабатывания электромагнита, управляющего переключателем золотникового или струйного типа, и рабочего цилиндра с поршнем, вызывающим перемещение рабочего органа.
Примером пневмогидравлического привода служит привод, в котором используется быстродействующее пневматическое устройство управления, а силовая часть является гидравлической.
Существуют пневмогидросистемы, в которых быстрое перемещение рабочего органа выполняется за счет пневмопривода. При приближении РО к конечной точке включается гидропривод, осуществляющий точное позиционирование РО.
Усилители
Усилители — это преобразователи, предназначенные для усиления слабого сигнала от датчика (порядка 10~4... 10~5 Вт) до уровня, требуемого для его обработки, и усиления маломощного управляющего сигнала до мощности, необходимой для управления исполнительным устройством системы (порядка 103 Вт) за счет внешнего источника энергии. По виду используемой энергии усилители, как и другие преобразователи, делят на электрические, гидравлические и пневматические.
В группу электрических усилителей входят электронные, магнитные, электромашинные и другие устройства, изменяющие параметры электрического сигнала. Усиление происходит за счет использования энергии стороннего источника питания: гидронасоса, пневмосети и в конечном счете электросети.
В ряде случаев усилители наряду с функцией усиления мощности выполняют функцию преобразования сигнала в другой вид, более удобный для работы системы управления (например, золотниковый гидрораспределитель с электромагнитным приводом).
Усилители выполняются как самостоятельные элементы либо входят в состав измерительных или исполнительных устройств и являются в этом случае их неотъемлемой частью. Как и другие элементы систем управления, усилители характеризуются статическими и динамическими характеристиками, перечисленными ранее.
Основными параметрами усилителей помимо коэффициента усиления (по току, напряжению, мощности) постоянной времени (инерционность) и рабочего диапазона частот являются:
• линейность статической характеристики;
• величина зоны нечувствительности;
• энергетические параметры (входная, выходная и потребляемая мощность);
• стабильность параметров при изменении условий внешней среды и по времени и их воспроизводимость при серийном производстве;
• долговечность, надежность, вибростойкость и т.д.
Возможный коэффициент усиления по мощности усилителей, применяемых в системах управления, лежит в диапазоне от 10 до 107. Выходная мощность усилителей, применяемых в системах управления, лежит в пределах от долей ватт до десятков киловатт. При мощности до 100 Вт обычно применяют электронные усилители, при большей требуемой мощности — гидро- и пневмоусилители.
Так как слабый сигнал от датчика или сравнивающего органа на пути до исполнительного устройства претерпевает серию преобразований и усиливается в миллионы раз, усиление происходит в несколько этапов, а сами усилители строят часто многокаскадными, состоящими в свою очередь из нескольких соединенных последовательно усилителей.
Важной характеристикой являются величина запаздывания и инерционность усилителя. Обычно можно считать безинерционными электронные усилители, гидравлические золотники, струнные реле. Наибольшим запаздыванием обладают магнитные и гидроусилители.
Усилители представляют обычно инерционным звеном первого порядка, характеризуемым передаточным коэффициентом (коэффициентом усиления усилителя) и постоянной времени. Динамические характеристики усилителей основных классов приведены в табл.4.1.
Таблица 4.1.
|
Вид усилителя |
Основное применение усилителя |
Коэффициент усиления по мощности |
Постоянная времени, с |
|
Полупроводниковые |
Усилительный каскад на постоянном токе Усилительный каскад на переменном токе Оконечный усилитель мощности |
103...105
104... 106
102...103 |
10-6... 10-7
10-2...10-2.
10 -2… 10-4 |
|
Магнитные |
Усилительный каскад на переменном токе |
103 …105 |
10 -1…10-4 |
|
Электромашинные |
Оконечный усилитель мощности ; |
102...104 |
1…10-2 |
|
Гидравлические |
Дроссельные Струйные |
104...166 103...104 |
10-1…10-2 10-1... 10-2 |
|
Пневматические |
Дроссельные Струйные |
105...107 103…105 |
10-2...10-3 10-3...10-4 |
1. Электронные усилители
Особенностью электронных усилителей является их способность усиливать маломощные сигналы порядка 10-6 Вт при напряжениях порядка 10-3 В, поэтому в системах управления их применяют в основном в маломощных цепях для обработки сигналов от датчиков, для согласования элементов системы управления по уровню или мощности сигналов, для выработки управляющего сигнала. По выходной мощности эти усилители уступают гидро- и пневмоусилителям тех же габаритов, поэтому для управления исполнительными устройствами они применяются не так широко.
По соотношению входного сопротивления усилителя ZBX и выходного сопротивления источника сигнала Zс усилители делятся:
на усилители напряжения — ZВХ ≥ 100 МОм >> Zc , ток во входной цепи усилителя Івх = 0 (источник работает в режиме холостого хода), усилитель практически не влияет на процессы в источнике (например, применяется для усиления сигналов с делителей напряжения типа неравновесных мостов);
усилители тока — Zвх<<Zc, источник сигнала работает в режиме, близком к короткому замыканию, ток во входной цепи усилителя Iвх задается источником;
усилители мощности — Р = IU: ZBX = Zc, ток и напряжение на входе усилителя определяются как источником сигнала, так и усилителем.
При проектировании цепи управления следует уделить внимание согласованию звеньев цепи по их входным и выходным сопротивлениям.
В настоящее время в основном применяются полупроводниковые усилители благодаря их малым габаритам, низкой потребляемой мощности и высокой надежности. Работа полупроводникового усилителя основывается на возможности управления током от эмиттера к коллектору транзистора путем изменения напряжения на базе. На рис. 3.31 приведена схема простейшего усилителя напряжения с общим эмиттером. Схема питается от источника, плюсовой контакт которого соединен с землей, а минусовой при помощи делителя R1, R2 устанавливает режим работы транзистора. Выходная цепь представляет собой делитель, в первом из плеч которого стоят Rэ, и транзистор, во втором — RK. Выходное напряжение снимается с первого плеча делителя. В зависимости от входного напряжения меняется ток Iк через Rэ, RK и выходное напряжение Uвых как падение напряжения на Rэ и транзисторе:
![]()
При закрытом транзисторе Iк= 0, падение напряжения на RK равно нулю и Uвых=Eп. При открытом транзисторе
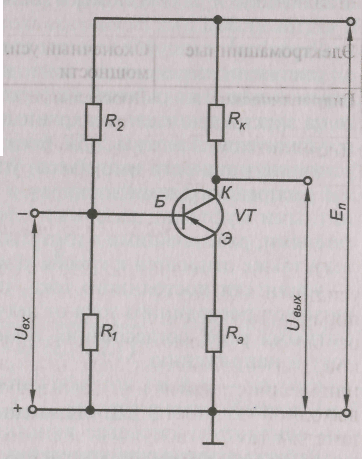
Рис. 4.1. Усилительный каскад с общим эмиттером
На рис. 4.2 представлена схема двухкаскадного усилителя тока, оба каскада которого соответствуют рис. 4.1.

Рис. 4.2. Двухкаскадный усилитель
Такой усилитель имеет коэффициент усиления 30. ..200.
Основными характеристиками усилителей являются уровень собственных шумов и пороговая чувствительность — минимальное значение входного сигнала, при котором выходной сигнал мож- но отличить от собственных шумов с заданной вероятностью Р (при Р = 0,98 сигнал на выходе должен превышать шум в 3 раза).
Источником собственных шумов являются электромагнитные наводки, уменьшить которые можно экранированием, а также тепловые шумы и шумы усилительных элементов. Особенно вредны шумы во входной цепи и первом каскаде усиления усилителя, где их уровень соизмерим с уровнем полезного сигнала. Шумы усиливаются следующими каскадами усилителя вместе с полезным сигналом и передаются на выход усилителя.
Современные усилители кроме своей основной функции обычно осуществляют также фильтрацию входного сигнала, оставляя в нем только представляющие интерес для анализа частотные составляющие и удаляя помехи (например, наводки от электросети с частотой 50 Гц).
Различают следующие типы транзисторных усилителей:
усилители переменного тока, которые управляют мощностью переменного тока рабочей частоты (например, 50 Гц), подаваемого на электродвигатель синхронный или асинхронный;
усилители с импульсной модуляцией, предназначенные для усиления мощности импульсов, управляющих электромагнитными распределителями в гидро- и пневмоприводах, электромагнитными муфтами, шаговыми электродвигателями, электродвигателями, работающими в импульсном режиме, и т.д. (эти усилители также относятся к группе усилителей переменного тока);
усилители постоянного тока, предназначенные для усиления сигналов постоянного тока от датчиков, управления электромагнитными реле, согласования элементов системы управления по току и напряжению.