

Дискретна математика
.pdf52. Орієнтов ні гр фи: визн чення, способи з д ния.
Ми розглядали графи, не надаючи значення тому, що з кожної пари кінцевих вершин одна може мати ту властивість, що обхід графа по маршруту може починатися тільки з неї. Але ж у зображенні передачі параметрів між підпрограмами, напрямку струму в електричних мережах, транспортних маршрутів ця властивість дуже істотна.
Означення. Орієнтованим графом (орграфом) G = (V, E, Θ) назвемо трійку, що складається з множини V вершин, множини E ребер, функції Θ, що ставить у відповідність кожному ребру з множини Е упорядковану пару вершин з множини V.
Будемо позначати ребра і вершини так само як і для графів, але якщо Θ(ei) = (vi, vj), то кінцеву вершину vi назвемо початковою, а кінцеву вершину vj - заключною. Тепер паралельними будуть ребра, що мають однакові початкові і однакові заключні вершини. Петля – це ребро ei, для якого Θ(ei) = (vj,vj). Означення інцидентних і суміжних вершин і ребер залишаються в силі. Якщо Θ(ei) = (vi, vj), то будемо називати ребро ei вихідним з вершини vi і вхідним у вершину vj.
Підграфи орієнтованого графа визначаються аналогічно підграфам графа з очевидними застереженнями.
Якщо графічний і аналітичний способи задання графа практично ми вже розглянули, тому що очевидна їхня модифікація на основі задання графів, то залишається модернізувати матричний спосіб.
Як і для графів будемо застосовувати два види матриць: а) матриця інцидентності А=║aij║, де
1, якщо ребро еj інцидентне вершині vi і виходить з неї; aij= -1, якщо ребро ej інцидентне вершині vi і заходить у неї;
0, якщо ребро ej не інцидентне вершині vi.
У відношенні матриці інцидентності виникає питання, чи можна з її допомогою задавати графи з петлями?
б) матриця суміжності R=║rij║, де rij дорівнює числу ребер, вихідних з вершини vi і вхідних у вершину vj, 0, якщо таких ребер немає.
Приклад 17. Орграф заданий геометрично.
|
v2 |
v5 |
v1 |
v4 |
v7 |
|
v3 |
v6 |
Як і раніше, ступінь d(vi) вершини vi - число інцидентних їй ребер. Але тепер потрібно пов'язати ступінь з напрямком ребер.
Означення. Напівступенем заходу d-(vi) вершини vi орграфа назвемо число вхідних у вершину vi ребер, а напівступенем виходу d+(vi) вершини vi орграфа - число вихідних з вершини vi ребер.
Тому що кожне ребро збільшує на 1 і напівступінь заходу однієї з вершин орграфа, і напівступінь виходу однієї з вершин орграфа (у тому числі і петля), то сума напівступенів заходу усіх вершин орграфа G дорівнює сумі напівступенів виходу усіх вершин того ж орграфа G. Цей результат звичайно називають орлемою про рукостискання.
Означення. Витоком орграфа G назвемо вершину, у якої напівступінь заходу дорівнює нулю. Стоком орграфа G назвемо вершину, у якої напівступінь виходу дорівнює нулю.
Так, для орграфа з прикладу 17 вершина v1 є витоком, a вершина v7 - стоком.
Означення маршрутів, ланцюгів, шляхів і циклів в орієнтованих графах (які тут називаються відповідно орієнтованими маршрутами, ланцюгами, шляхами і циклами) залишаються в силі, якщо ми у означеннях відповідних понять для графів для послідовностей вершин, що чергуються, і ребер зажадаємо, щоб vi і vi+1 були, відповідно, вершиною, звідкіля ребро ei виходить і куди заходить.
Приклад 18. Орграф заданий геометрично. |
|
|
||||
|
v2 |
|
e1 |
|
v5 |
|
v1 e2 |
e4 |
|
e3 v4 |
e5 |
e6 |
v7 |
|
e7 |
e8 |
|
e9 |
|
e10 |
|
v3 |
|
e11 |
|
v6 |
|
Тоді: v1e2 v2e1v5e6v7 – маршрут, ланцюг і шлях |
|
|||
v1e2 |
v2e3 |
v4e4 |
v1 – цикл і маршрут |
маршрути |
v1e2 |
v2e3 |
v4e4 |
v1 e3 v3e11 v6 – тільки маршрут |
|
61

Тоді з матрицею суміжності орграфа можна пов'язати один цікавий результат. Дуже часто дослідників цікавить кількість орієнтованих маршрутів певної довжини між вершинами графа. Справедлива наступна
Теорема 3.17. Елемент rpij матриці Rp дорівнює числу орієнтованих маршрутів довжини р з вершини
vi у вершину vj.
Доведення. Покажемо індукцією по р. Крок 1. Для р =1 твердження очевидне.
Крок 2. Припущення індуктивне – нехай теорема вірна для Rp-1. Крок 3. Покажемо, що теорема вірна для р. За означенням Rp:
n
rijp (rik( p 1) rkj ); ( ) k 1
Тут згідно з припущенням rik(p-1) - число орієнтованих маршрутів довжини p-1 між вершинами vi і vk. Для кожного k член суми (*) визначає число орієнтованих маршрутів довжини p з вершини vi у vj, останнім ребром яких є (vk, vj). Однак, число це є числом маршрутів з vi у vj, що доводить теорему. Теорема доведена.
|
Приклад19. Граф і його матриці суміжності першого і другого ступеня. |
|||
e6 |
|
e1 |
|
|
v1 |
|
|
v3 |
|
|
|
|
||
e2 |
|
|
e4 |
|
v2 |
|
|
e5 |
v4 e 7 |
|
|
|
|
|
1 |
0 |
|
|
|
|
1 |
1 |
1 |
1 |
|
|
|
1 |
0 |
|
|
||||||||
R |
|
1 |
0 |
0 |
0 |
|
, R 2 |
|
|
1 |
0 |
1 |
0 |
|
|
|
|
0 |
1 |
0 |
1 |
|
|
|
|
1 |
1 |
0 |
1 |
|
|
|
0 |
1 |
0 |
1 |
|
|
|
|
1 |
1 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Означення. Неорієнтований граф, що одержується у результаті зняття орієнтації з ребер орієнтованого графа G, називається покладеним в основу неорієнтованого графа G і позначається Gu.
Означення. Орграф G зв'язний, якщо зв'язний покладений в його основу неорієнтований граф.
Компоненти орграф G визначаються по графу Gu. |
|
|
|
|||
Легко побудувати два зв'язаних орграфи G1 |
і G2 такі, що покладений у їхню основу граф G є зв‘язним, |
|||||
а в одному з орграфів (наприклад, G2) існують пари вершин (наприклад, v2 |
і v5), між якими немає |
|
||||
орієнтованого шляху, тоді як у другому орграфі (G1) немає таких вершин. |
|
|
||||
Приклад 20. |
|
|
|
|
|
|
v2 |
v3 |
v2 |
v3 |
v2 |
v3 |
|
|
|
|
|
|
|
|
v1 |
v4 |
v1 |
v4 v1 |
|
v4 |
|
v5 |
|
|
v5 |
v5 |
|
|
|
|
G |
|
G1 |
|
G2 |
Тому для формального означення інтуїтивного уявлення про зв‘язність орграфів з урахуванням орієнтації ребер уведемо поняття сильної зв‘язності орграфів.
Означення. Орграф G сильно зв'язний, якщо між кожною його парою вершин існує орієнтований
шлях.
Щоб уникнути плутанини, зв'язний орграф звичайно називають слабко зв‘язним. Тепер можна сказати, що граф G2 слабко зв'язний, а граф G1 сильно зв'язний.
Операції об'єднання і перетину орграфів визначаються аналогічно операціям об'єднання і перетину графів. Залишаються для орграфів в силі і означення рангу і цикломатичного числа графів.
Пошук у ширину в орієнтованому графі дозволить знайти множину усіх вершин, досяжних із заданої вершини v.
62

Ейлерові і гамільтонові орграфи. Зробимо спробу одержати для орграфів аналоги властивостей ейлерових і гамільтонових графів. Зокрема, доцільно досліджувати властивості гамільтонових орциклів в орграфах спеціального виду, що називаються турнірами. Уведемо відповідні визначення.
Означення. Замкнутий орланцюг, що містить кожне ребро орграфа, назвемо ейлеровим орланцюгом. Зв'язний орграф, що містить орієнтований ейлерів ланцюг, назвемо ейлеровим орграфом.
Це означення дозволяє сформувати певні уявлення про те як співвідносяться ейлерові графи і орграфи.
Приклад 21. Орграф, що не є ейлеровим, хоча покладений в його основу граф - ейлерів.
Тепер спробуємо знайти умову аналогічну наведеній в теоремі 3.15, необхідну і достатню для того, щоб зв'язний орграф був ейлеровим. Легко бачити, що необхідною умовою ейлеровості орграфа є його сильна зв‘язність.
Очевидно також, що ейлерів орграф (крім ізольованого орграфа, який не має ребер) не може мати ні витоків, ні стоків.
Тепер можна сформулювати основну теорему про ейлерові орграфи. Теорема 3.18. Для зв‘язного орграфа G наступні твердження еквівалентні:
1)G - ейлерів орграф;
2)Для кожної вершини vi орграфа G виконується d+(vi) = d-(vi);
3)G є об'єднанням декількох реберно непересічних орциклів.
Доведення. Воно цілком аналогічне доведенню теореми 3.15 і пропонується за вправу.
Як і для гамільтонових графів дослідження властивостей гамільтонових орграфів виявляється значно менш успішним.
Означення. Орцикл орграфа G назвемо гамільтоновим, якщо він включає кожну вершину орграфа G. Оршлях графа G назвемо гамільтоновим, якщо він включає кожну вершину орграфа G. Орієнтованим гамільтоновим графом назвемо орграф, що містить гамільтонів орцикл. Орграф, що містить гамільтонів шлях назвемо напівгамільтоновим.
Про гамільтонові орграфи відомо дуже мало. До того ж, деякі теореми про гамільтонові графи, очевидно, нелегко (якщо взагалі можливо) узагальнити на орграфи. Приведемо без доведення деякі результати про гамільтонові орграфи.
Теорема 3.19. Нехай G - сильно зв'язний орграф, що має n вершин. Якщо d+(vi) ≥ n/2 і d-(vi) ≥ n/2 для кожної вершини vi орграфа G, то G є гамільтоновим орграфом.
Тому що одержувати результати в цьому напрямку не дуже просто, обмежимося розглядом питання про те, які специфічні типи орграфів є гамільтоновими. У цьому плані широко відомий один тип гамільтонових орграфів — турніри, для яких відповідні результати набувають особливо простої форми.
53. Турніри.
Означення. Турніром назвемо орграф, у якому будь-які дві вершини з'єднані рівно одним ребром. Підставою для вибору такої назви служить те, що подібні орграфи можна використовувати для
запису результатів тенісних чи будь-яких інших турнірів, у яких не дозволені нічиї.
Приклад 21. Розглянемо турнір, який інтерпретується вищенаведеним способом: команда z завдала поразки команді w, але програла команді v, і т.д.
Оскільки турнір може мати витік чи стік, турніри не є в загальному випадку гамільтоновими орграфами. Однак умови гамільтоновості турнірів досить прості.
Теорема 3.20. (Теорема Редеї і Каміона).
(i)Усякий турнір напівгамільтонів;
(ii)усякий сильно зв'язний турнір гамільтонів.
Доведення. (i) Скористаємося індукцією по числу вершин турніру.
Крок 1. Якщо турнір має менше чотирьох вершин, то твердження, очевидно, вірне.
63

Крок 2. Припустимо, що будь-який турнір з n вершинами напівгамільтонів.
Крок 3.Нехай Т — турнір з n+1 вершинами, і нехай турнір Т' з n вершинами отриманий з турніру Т вилученням деякої вершини v разом із усіма інцидентними їй дугами. Тоді за припущенням індукції Т' має
напівгамільтонів оршлях v1 v2 vn . Розглянемо три можливі випадки.
(1)Якщо (v,v1) — ребро в T, то потрібним шляхом є
vv1 v2 vn
(2)Якщо (v,v1) не є ребром у Т (це означає, що ребром є (v1,v)) і якщо існує таке i, що (v,vi ) — ребро
вТ, то, вибираючи перше iз такою властивістю, одержимо, що потрібним шляхом є (див. рис. 3.6)
v1 v2 vi 1 v vi vn
(3) Якщо в T не існує ребра вигляду (v,vi), то потрібним шляхом є v1 v2 vn v .
(ii) Доведемо більш сильний результат, що полягає в тому, що сильно зв'язний турнір Т з n вершинами містить орцикли довжини 3, 4, ..., n.
Рис. 3.6
Рис. 3.7 Рис. 3.8
Спочатку покажемо, що Т містить орцикл довжини три. Для цього виберемо в Т довільну вершину v і позначимо через W множину усіх вершин w, таких, що (v, w) — ребро в T, а через Z — множина усіх вершин z, таких, що (z, v)— ребро в T. Тому що T сильно зв'язний, то обидві множини W і Z не порожні, і тому в Т
знайдеться дуга вигляду (w', z'), де w' належить W, а z' належить Z. Тоді необхідним циклом довжини три є
v w z v .
Залишилося тільки показати, що якщо існує орцикл довжини k (k < n), то існує й орцикл довжини k+1. Нехай v1 vk v1 – орцикл довжини k. Припустимо спочатку, що в Т існує вершина v, яка не
належить цьому орциклу й має таку властивість, що в Т містяться ребра вигляду (v, vi) і вигляду (vj, v). Тоді повинна існувати така вершина vi, що і (vi-1,v), і (v,vi) є ребрами в Т; при цьому необхідним орциклом є (рис.
3.7)
v1 v2 vi 1 v vi vk v1
Якщо не існує вершин, що мають зазначену вище властивість, то множину вершин, що не містяться в орциклі, можна розбити на дві непересічних множині W і Z, де W є множина таких вершин w, що (vi, w) для будь-якого i є ребром, а Z є множина таких вершин z, що (z,vi) для будь-якого i є ребром. Тому що Т сильно зв'язний, то обидві множини W і Z не порожні, і тому в Т знайдеться ребро вигляду (w', z'), де w' належить W, a z' належить Z. Тоді необхідним орциклом буде (рис.3.8)
v1 w z v3 vk v1
54. Орієнтов ні дерев т їх вл стивості.
Інтуїтивно зрозуміло, що орієнтовані дерева також не повинні мати циклів і для них також повинна виконуватися умова існування оршляху між кожною парою вершин. Легко, однак переконатися, що такі умови приводять до орграфів, що ми не хотіли б віднести до орієнтованих дерев, зокрема
64

Дійсно, цей граф циклів не містить, але традиційного для дерев наявності між парою вершин не більш одного шляху тут не забезпечується. Тому потрібно необхідним чином визначити орієнтовані дерева.
Означення. Вершина V орграфа G називається коренем орграфа G, якщо з вершини V існує орієнтований шлях у кожну з інших вершин орграфа G.
Означення. Орграф G називається орієнтованим (кореневим) деревом, якщо він має корінь r і
покладений у його основу граф є деревом.
Існує ще одне визначення орієнтованого (кореневого) дерева, побудоване на його властивостях.
Означення. Орієнтованим деревом називається орграф з коренем, з якого є тільки один орієнтований маршрут у будь-яку іншу вершину орграфа G.
Означення. Орграф G називається квазісильно зв‘язним, якщо для будь-якої пари його вершин v1 і v2 існує така вершина v3, з якої йдуть орієнтовані шляхи у вершини v1 і v2, причому вершина v3 не обов'язково відрізняється від вершин v1 і v2.
Тоді справедлива наступна
Теорема 3.1. Для орієнтованого дерева G виконуються наступні твердження:
1)орграф G – квазісильно зв'язний і втрачає цю властивість при видаленні з нього будь-якого ребра;
2)орграф G – квазісильно зв'язний і має таку вершину r, що d-(vi) = 0 і d-(vi) = 1, для кожної іншої вершини v ≠ r;
3)орграф G – квазісильно зв'язний без циклів.
Доведення. Установити ці властивості досить просто.
1.Очевидно, що G квазісильно зв'язний. Нехай він не втрачає цю властивість при видаленні ребра (vi, vj). Тоді існує така вершина vk, що з неї існують шляхи в vi і vj, що не використовують ребро (vi,vj), тобто існують в орграфі G по два орієнтованих шляхи до вершин, що суперечить умові.
2.Тому що G – квазісильно зв'язний, для його кореня d-(r) = 0. Для будь-якої іншої вершини vi ≠ r d-(vi) = 1, тому що якби виконувалася умова d-(vi) > 1, то існувало б два шляхи у вершину vi, що суперечить умові.
55. Символьне зобр ження орієнтов них дерев.
Очевидно, що специфіка орієнтованих дерев, що полягає в тому, що в кожну вершину з кореня веде єдиний шлях, може істотно спростити способи їхнього задання. Той факт, що в орієнтованих деревах напівступінь заходу для усіх вершин, крім кореня, дорівнює 1, дозволяє задати граф символьним рядком, який специфікує обхід орієнтованого дерева в порядку зверху - вниз, зліва - направо. Для уточнення цієї модифікації потрібно ввести ряд термінів, що відбивають особливості орієнтованих дерев.
Означення. Назвемо глибиною вершини орієнтованого дерева довжину орієнтованого шляху від кореня до цієї вершини.
Сутність термінів, що вводяться, ми будемо пояснювати на наступному прикладі.
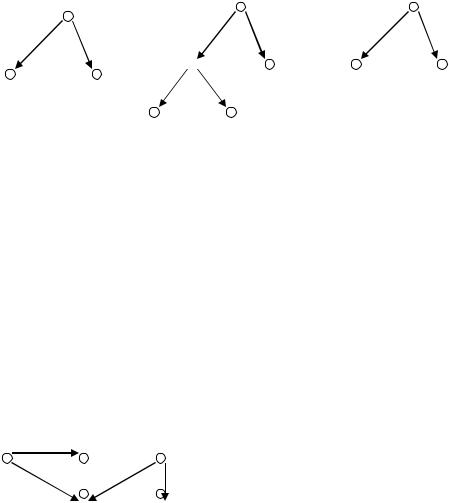
Приклад 22. Задамо орієнтоване дерево геометричним способом |
|
|
||||||
|
|
v0 |
|
|
|
0й рівень |
||
|
|
v1 |
v4 |
|
|
1 |
й |
рівень |
|
|
|
|
|
||||
v2 |
v3 |
v5 |
v8 |
2 |
й |
рівень |
|
|
|
|
|
||||||
|
|
v6 |
v7 |
|
|
3 |
й |
рівень |
|
|
|
|
|
||||
Рис. 3.9
Таким чином, глибина вершини v0 – 0, вершини v1 – 1, вершини v5 – 2, вершини v6 – 3.
Означення. Назвемо глибиною орієнтованого дерева найбільшу глибину вершин цього дерева. Так глибина дерева з прикладу 22 дорівнює 3.
Означення. Усі вершини орієнтованого дерева, глибина яких дорівнює i, назвемо i-м рівнем орграфа. Рівні дерева з прикладу 22 наведені на рис. 3.9.
Означення. Якщо в орієнтованому дереві вершини vi, vk суміжні, причому ребро виходить з вершини vi, то вершину vi назвемо прямим предком вершини vk, а вершину vk- прямим нащадком вершини vi.
У нашому прикладі, зокрема, v0 - прямий предок вершин v1 і v4, а вершини v1 і v4 - прямі нащадки вершини v0.
65
Означення. Якщо в орієнтованому дереві існує шлях з вершини vi у вершину vk, то назвемо вершину vi предком вершини vk, а вершину vk – нащадком вершини vi.
У нашому прикладі, зокрема, v0 - предок вершин v1,v2,…,v8, а вершини v1,v2,…,v8- нащадки вершини
v0.
Означення. Вершину орієнтованого дерева, яка не має прямих нащадків, назвемо листком. У нашому прикладі вершини v2,v3,v6,v7,v8 - листя.
Уточнимо поняття піддерева орієнтованого дерева в такий спосіб.
Означення. Назвемо піддеревом орієнтованого дерева G зв'язний його підграф G1 такий, що:
1)якщо G1 містить вершину орграфа G, то містить і всіх її нащадків;
2)жодна з вершин, що не входять у підграф G1, не є нащадком вершини, що входить у підграф G1. У нашому прикладі піддеревами є, зокрема:
v1 |
v4 |
|
v5 |
v5 |
v8 |
v6 |
v7 |
v2 v3  v6 v7
v6 v7
Тепер опишемо модифікацію, відому, як ліве (праве) дужкове зображення орієнтованого дерева. Отже, ідея зображення – перелічення прямих нащадків кожної вершини за правилом зверху - вниз, зліва - направо.
Якщо G1,…,Gn – піддерева графа G, корені яких – прямі нащадки кореня графа G, то ліве дужкове зображення lr(G) = v0(lr(G1),…,lr(Gn)), а праве дужкове зображення rr(G) = (rr(G1), …,rr(Gn))v0. Таке визначення називається рекурсивним і ми часто будемо використовувати цей прийом в подальшому. Якщо корінь графа G прямих нащадків не має, то lr(G) = rr(G) = v0.
Для розглянутого прикладу:
lr (G) = v0(v1 (v2,v3), v4(v5(v6,v7),v8)) rr(G) = ((v2,v3)v1,((v6,v7)v5,v8)v4)v0
Дуже важливий клас орієнтованих дерев – це дерева, напівступінь виходу кожної вершини якого не перевищує 2. Зокрема, вони широко застосовуються при кодуванні ін формації. У наступній темі ми розглянемо питання про те, скільки різних дерев можна побудувати на n вершинах.
56.Гр фи й відношення.
Ми уже визначили раніше поняття бінарного відношення. Дуже зручно представляти відношення орієнтованими графами, у яких вершини відповідають елементам множини, на якій визначаються відношення, а ребра – упорядкованим парам елементів, що визначають відношення.
Нехай задана множина X={2,3,4,6,9}. Тоді відношення «x дільник y» можна задати графіком: {(2,4), (2,6), (3,6), (3,9)}. Таке відношення можна представити за допомогою наступного орграфа:
2 |
4 |
3 |
|
6 |
9 |
Легко помітити, що всяке бінарне відношення на множині A задає орграф без паралельних ребер
(A, E( ), ), де E( ) = {(vi,vj) | vi, vj A і vi vj}, (vi,vj) = (vi,vj).
Деякі бінарні відношення одержали найменування за свої властивості, зокрема в першому розділі, ми ввели рефлексивні, симетричні і транзитивні відношення, відношення еквівалентності й інші.
Орграфи, що представляють такі відношення, також мають специфіку:
1)якщо орграф представляє рефлексивне відношення, то він містить петлю при кожній вершині;
2)якщо орграф представляє симетричне відношення, то якщо він містить ребро, що виходить з вершини vi і заходить у вершину vj, він містить ребро, що виходить з вершини vj і заходить у вершину vi;
3)якщо орграф представляє транзитивне відношення, то якщо він містить ребро, що виходить з
вершини vi і заходить у вершину vj, і ребро, що виходить з вершини vj і заходить у вершину vk, то він містить ребро, що виходить з вершини vi і заходить у вершину vk.
З іншого боку, всякий орграф визначає на множині його вершин V бінарне відношення
проходження G, тобто ми записуємо vi αG vj, якщо Θ(ei) = (vi,vj) для деякого ребра e i E. Ці міркування узагальнює наступна Теорема 3.22. Клас множин з одним бінарним відношенням знаходиться в біективній відповідності з класом
орграфів без паралельних ребер.
66

57.Гіпергр фи.
Іноді буває дуже важко за допомогою графів представляти взаємозв‘язки об‘єктів конкретної предметної області, якщо їх сутність не визначається парою об'єктів, а для пояснення необхідна участь більшої кількості об‘єктів.
Наприклад, при представленні предметних областей у базах знань і базах даних використовується три типи структурних елементів: об‘єкт; взаємозв‘язок; властивість об‘єкта чи взаємозв‘язку. Причому взаємозв‘язок визначається між двома і більше об'єктами. Наприклад, взаємозв‘язок ―виріб – матеріал – операція― характеризується низкою властивостей, зокрема, нормою витрати матеріалу по операції на виріб, нормою відходів матеріалу по операції на виріб. Чи можна за допомогою графів представити предметну область, описувану цими трьома типами базових елементів. Можна, звичайно, але це вимагало б введення складних взаємозв‘язків, об‘єктами яких виступають інші взаємозв'язки, що і дозволило б звести взаємозв‘язок n об‘єктів до n бінарних взаємозв‘язків, кожен з яких пов‘язує один взаємозв‘язок і один об‘єкт. Інший метод підказує співвідношення графів і бінарних відношень. Міркуючи за аналогією, можна від узагальнення бінарних відношень n-арними перейти до узагальненого класу графів, у яких ребру співставляється n-ка вершин. Об‘єкти цього узагальненого класу графів і є гіперграфами.
Визначення. Гіперграф H - це трійка (V, E, Θ), де V - множина вершин, Е – множина ребер, Θ – функція, яка кожному ребру з множини Е ставить у відповідність ≥ 2 вершин з множини V.
За означенням кожен граф є гіперграфом, але обернене в загальному випадку невірне.
Багато понять графів, зокрема паралельні (кратні) ребра, інцидентність вершин і ребер, ступінь вершини, ізольовані вершини, суміжні вершини, підгіперграфи з очевидними застереженнями переносяться на гіперграфи. Крім того, вводяться ступінь d(ej) ребра ej (потужність підмножини, що є значенням функції Θ(ej)), суміжні ребра (ребра ei і ej суміжні, якщо Θ(ei) Θ(ej) ).
У гіперграфах зберігається визначення маршруту ((v0,vr)-маршруту) як послідовності вершин і ребер, що чергуються, v0,e1,v1, e2,v2,…,vr-1,er,vr, у якій vi-1, vi Θ(ei) для i = 1,2,…,r... На основі цього визначення маршруту вводяться визначення ланцюга і циклу, яким у графах відповідають шлях і простий цикл.
Визначення. У гіперграфі шлях, у якого всі ребра різні і усі вершини, крім, можливо, v0 і vr, різні, називається ланцюгом ((v0,vr)-ланцюгом). У гіперграфі ланцюг, для якого r>1 і v0 = vr називається циклом.
Як і в графах довжиною ланцюга називається кількість його ребер.
Вершини v і u гіперграфа називаються зв‘язаними, якщо v = u чи в гіперграфі існує (v,u)-ланцюг. Тому що відношення зв'язаності очевидно є відношенням еквівалентності, то воно визначає на множині вершин гіперграфа розбиття {V1, V2,…,Vq}, породжені на підмножинах якого підгіперграфи називаються компонентами (зв‘язними компонентами) гіперграфа. Кількість компонентів гіперграфа H позначається k(H). Якщо для гіперграфа H k(H) = 1, то він називається зв‘язним.
Використовуючи згадану вище ідею представлення взаємозв‘язків n об'єктів через бінарні взаємозв'язки об'єктів і інших взаємозв'язків, можна представити довільний гіперграф H = (V, E, Θ) у вигляді двочасткового графа G = (V E, E , Θ ), де E містить ребро e для кожної пари (v,e) V E такої, що v Θ(e), причому для цього ребра e значенням функції Θ буде пара (v,e). Граф G називають кьоніговим представленням гіперграфа H.
Таке представленням гіперграфів виявилося дуже зручним для роботи з гіперграфами, тому доцільно розглянути його більш детально.
Приклад. Гіперграф H1 (його вершини зображені у виді кружечків, ребра – прямокутників, лініями з'єднані аргумент-ребро з вершинами з відповідного значення функції Θ) і його кьонігове представлення граф G1:
v1 |
|
|
v2 |
e1 |
v1 |
e1 |
|
|
|
|
|
v2 |
e2 |
|
e2 |
e3 |
v3 |
e4 v4 |
v3 |
e3 |
e5 |
v5 |
|
|
|
v4 |
e4 |
|
|
|
|
v5 |
|
e5 |
|
|
|
|
|
v6 |
e6 |
v6 |
e6 |
|
v7 |
|
v7 |
|
|
H1 |
|
|
|
|
G1 |
Розглянемо ряд результатів про властивості гіперграфів, формулюючи їх у вигляді наступних теорем. Теорема 3.23. Гіперграф H = (V, E, Θ) з n вершинами і m ребрами не містить циклів тоді і только тоді,
коли
(d(e j ) 1) n k(H).
e j E
Теорема 3.24. Гіперграф H = (V, E, Θ) не містить циклів тоді і тольки тоді, коли для будь-якої непорожньої підмножини E множини E виконується умова
|
| (e) | |
(d(e) 1). |
67 |
e E' |
e E' |
|
|

У теорії гіперграфів існує ряд інших аналогів результатів для графів і з ними можна познайомитися в літературі, що рекомендується до курсу.
58. Нескінчені гр фи.
Установлене вище співвідношення між відношеннями й орграффами без паралельних ребер вимагає розширення уявлень про графи і в плані зняття обмежень на скінченність множин вершин і ребер. Мова йде про графи, що представляють нескінченні відношення, іншими словами нескінченні графи.
Визначення. Нескінченим графом називається пара G = (V, E), де V – нескінчена множина вершин, Е
– нескінчена підмножина неупорядкованих пар вершин множини V2. Якщо множина вершин V і множина ребер E нескінченого графа G злічені, то граф G називається зліченим.
Варто відзначити, що наведене означення не включає випадки, коли V нескінчене, а E скінчене (такі об‘єкти є скінченними графами з нескінченним числом ізольованих вершин) чи V скінчене, а E нескінчене (такі об‘єкти є скінченними графами з нескінченним числом паралельних петель чи ізольованих ребер).
Приклад нескінченного графа наведений на рис. 3.10. Означення суміжних вершин, інцидентних ребер і вершин, паралельних ребер, петель, підграфів, ізоморфних і зв'язних графів, компонент зв‘язності, операцій над графами очевидним способом переносяться на нескінчені графи. Деякі означення зберігаються з очевидними уточненнями.
Рис. 3.10
Визначення. Ступенем вершини нескінченного графа називається потужність множини інцидентних їй ребер.
Визначення. Нескінченний граф, ступінь кожної вершини якого скінчений, називається локально скінченим.
Нескінченний граф, наведений на рис. 3.10, локально скінчений.
Визначення. Нескінчений граф, ступінь кожної вершини якого злічена, називається локально зліченим.
Справедлива наступна Теорема 3.25. Кожен зв‘язний локально злічений нескінчений граф є зліченим.
Доведення.
Наслідок 3.2. Кожен зв‘язний локально скінчений нескінчений граф є зліченим.
Ряд визначень для скінчених графів переноситься на нескінчені графи з варіантами, зокрема означення маршруту в скінченому графі переноситься на нескінчені графи як означення скінченого шляху. Крім того вводяться ще два означення.
Визначення. Нескінченим в одному напрямку маршрутом (з початковою вершиною v0) у нескінченному графі G називається нескінчена послідовність ребер (v0,v1), (v1,v2),…,(vi,vi+1),…...
Визначення. Нескінченим в обох напрямках маршрутом у нескінченому графі G називається нескінчена послідовність ребер …, (v-2,v-1), (v-1,v0), (v0,v1), (v1,v2),…...
Очевидним чином у нескінченому графі визначаються нескінчені в одному й обох напрямках ланцюг, шлях, відстані між вершинами.
Теорема 3.24 У зв‘язному локально скінченому нескінченому графі G для кожної його вершини v існує нескінченний в однму напрямку шлях з початковою вершиною v.
Доведення.
Для нескінченних графів маються аналоги більшості теорем про властивості графів. Зокрема, розглянемо властивості ейлерових і напівейлеровых нескінченних графів.
Визначення. Нескінченний в обох напрямках ланцюг, що містить кожне ребро зв‘язного зліченого графа G, називається двостороннім ейлеровим ланцюгом. Зв‘язний злічений граф G називається ейлеровим, якщо він містить двосторонній ейлерів ланцюг.
Визначення. Зв‘язний злічений граф G називається напівейлеровим, якщо він містить нескінченний в одному чи обох напрямках ланцюг, що містить кожне ребро графа G.
Теорема 3.26. Для зв‘язного зліченого ейлерового графа G виконуються такі твердження:
1)У графі G немає вершин непарного ступеня;
2)Для кожного cкінченого підграфа H графа G нескінченного графа H , одержуваний видаленням з G ребер підграфа H, має не більш двох нескінченних зв‘язних компонент;
68

3) Якщо, крім того, ступінь будь-якої вершини з підграфа H парний, то H має рівно одну нескінченну зв‘язну компоненту.
Доведення.
Теорема 3.27. Для зв‘язного зліченого напівейлерового, але не ейлерового графа G виконуються такі твердження:
1)граф G містить або не більш однієї вершини непарного ступеня, або не менш однієї вершини нескінченного ступеня;
2)Для кожного скінченого підграфа H графа G нескінчений графа H , одержуваний видаленням з G ребер підграфа H, містить рівно одну нескінченну зв'язну компоненту.
59. Укл д ння гр фів.
Оскільки геометричне задання графа вимагає зображння ребра відрізком прямої чи кривої на площині, то інтуїтивне уявлення про перетинання відрізків прямих і кривих може зажадати уточнення. Зокрема деякі автори вважають за необхідне додати, що ребра повинні зображуватися жордановою кривою, тобто неперервною кривою, що не має самоперетинань. Інакше можуть виникати незвичайні ситуації, найбільш проста з який може бути відбита на наступному прикладі графа із самоперетинанням ребер.
v 1 |
e1 |
v2 |
Визначення. Будемо говорити, що граф G укладений у даному просторі, якщо він зображений у цьому просторі за допомогою точок, що зображують вершини, і жордановых кривих, що зображують ребра, причому криві не перетинаються одна з одною.
Тут розуміється, що криві не перетинаються в точках простору, що не відповідають вершинам. Крім того, крива не проходить через точку, що відповідає вершині, не інцидентній ребру, яке ця крива зображує.
Теорема 2.28. Довільний граф може бути укладений у тривимірному просторі.
Доведення. Тому що число вершин графа скінченне, то кожній з них поставимо у відповідність різні точки осі x. Тому що число ребер скінченне, то для кожного з них виберемо площину, що проходить через вісь x і відрізняється від інших площин кутом нахилу. Тепер петля буде зображена колом у своїй площині, що проходить через точку, що відповідає вершині, а ребро – півколом у своїй площині, що проходить через точки, що відповідають інцидентним цьому ребру вершинам. Тому що всі ребра лежать у своїх площинах, вони не перетинаються. Теорема доведена.
60. Плоскі й пл н рні гр фи.
Використання проекцій для ілюстрації теореми про укладання підказує шлях одержання укладання графів на площині. Потрібно тільки знайти таку проекцію тривимірного укладання на площину, щоб проекції ребер не перетиналися, а проекції вершин не накладалися. Але чи завжди існують такі проекції?
Визначення. Назвемо плоским граф, зображений на площині так, що ніякі криві, що зображують його ребра, не перетинаються.
Тут у відношенні перетинання кривих справедливі висловлені вище зауваження. Визначення. Назвемо граф планарним, якщо він ізоморфний плоскому графу.
Існують як планарні графи, так і графи, що не є планарними. Покажемо, що такими є часто використовувані повний і двочастковий повний графы.
Теорема 2.29. Графи повний K5 і повний двочастковий K3,3 не є планарними.
Доведення.Спочатку покажемо непланарність повного графа K5 з п'ятьма вершинами. Тому що він обов'язково має цикл довжиною п'ять, то всі укладання на площині варто виконувати з урахуванням того, що існує укладання на площині п'ятикутника, що містить п'ять з десяти ребер графа K5:
v1
v5 |
v2 |
v4 |
v3 |
У такий спосіб залишається укласти на площині ще п'ять ребер. Очевидно, кожне ребро повинне цілком лежати усередині або поза п'ятикутником. Розглянемо випадок, коли нове ребро (без утрати загальності, нехай це буде ребро (v2, v5)) цілком лежить усередині циклу. Тоді вершину v1 зв'язати з вершинами v3 і v4 можна тільки провівши відповідні криві поза циклом. Але тоді зв'язати вершину v5 з вершиною v3, вершину v2 з вершиною v4 можна тільки провівши відповідні криві цілком усередині циклу, що зробити без перетинання неможливо. Ідея доведення для випадку проведення нового ребра (v2, v5) поза циклом зовсім аналогічна: показати, что усередині чи за межами п'ятикутника, але з'єднати усі вершини без перетинання ребер не можливо.
Тепер покажемо непланарність повного двочасткового графа K3,3. Для цього скористаємося тією ж ідеєю, але доведення побудуємо на існуванні циклу довжиною шість, прийнявши за частки: V1={v1, v2, v3} і
V2={v4, v5, v6}.
69

v4 |
|
v1 |
v3 |
v5 |
v6 |
|
v2 |
А тепер залишається провести ребра: (v1, v6), (v2, v4), (v3, v5). Очевидно, что ніякі 2 з них ні в середині ні зовні циклу не провести. Теорема доведена.
Існує ряд загальних результатів про ознаки планарності. Очевидно, що кожен підграф планарного графа планарний і кожен граф, що містить непланарний підграф, не планарний. Звідси випливає, що будьякий граф, підграфом якого є повний K5 чи повний двочастковий K3,3 графи, не планарний. Взагалі існуючі ознаки непланарності графів так чи інакше пов'язані з застосуванням властивості непланарності згаданих графів K5 і K3,3. Розглянемо дві таких ознаки непланарності, побудованних на операціях стягування і включення вершини в ребро.
Визначення. Два графи гомеоморфні, якщо вони обоє можуть бути отримані з того самого графа включенням нових вершин у його ребра.
Очевидно, що відношення гомеоморфності є відношенням еквівалентності. Справедлива наступна
Теорема 3.30. Граф G планарний тоді і тільки тоді, коли він не містить підграфів, гомеоморфних повному графу K5 чи повному двочастковому графу К3,3.
Доведення.
Справедлива наступна
Теорема 3.31. Граф G планарний тоді і тільки тоді, коли він не містить підграфів, що стягуються до повного графа K5 чи повного двочасткового графа К3,3.
61.Пл н рність т двоїстість гр фів.
Тут на прикладі графів ми розглянемо те важливе поняття, що використовується в математиці для формалізації взаємної схожості властивостей, що доповнює математичні об'єкти. Так, ми скористалися принципом двоїстості, введеним у перших двох розділах для булевих операцій, щоб спростити доведення ряду теорем. Корисна і двоїстість графів. Між графом і двоїстим графом є дуже багато цікавих зв'язків, що дозволяють проблему дослідження одного графа замінити на проблему використання іншого графа. Зокрема, ми вивчимо зв'язок властивості планарности графів і двоїстих графів, а потім розглянемо зв'язок циклів і розрізів графів і двоїстих графів.
Введемо поняття грані графа, як множини точок таких, что між будь-якою їх парою можна провести жорданову криву, не перетинаючи її з вершинами або ребрами графа.
Більш формально можна ввести грані, як розбиття множини точок площини по відношенню еквівалентності точок. Точки x, y еквівалентні, якщо кожна з них не збігається ні з якою вершиною графа і не лежить на ребрі графа і вони можуть бути з'єднані жордановою кривою, кожні дві точки якої еквівалентні.
Визначення. Нехай заданий довільний граф G = (V, E, Θ). Двоїстим до нього називається граф Gg = (Vg, Eg, Θg), що отримується у такий спосіб: 1) множину Vg вершин графа Gg утворюють точки, вибрані по одній в кожній грані графа G; 2) кожному ребру e E графа G у графі Gg співставляємо жорданову криву e , що перетинає тільки і тільки ребро e E графа G і з'єднує ті вершини графа Gg, що лежать у гранях графа G, суміжних ребру e.
Приклад 3.24. Графа G і двоїстий до нього граф Gg:
e1 |
v1 |
|
|
|
|
|
f 1 |
e 7 |
|
||
|
e2 |
e7 |
|
|
|
|
|
e 2 |
|
|
e 1 |
|
e3 |
|
|
|
e4 |
|
|
e 3 e |
5 |
e 6 |
e 4 |
v2 e5 |
e6 v3 |
|
|
v4 |
f 3 |
f 4 |
|
|
|||
|
|
v5 |
|
|
|
|
|
f 2 |
|
|
|
|
|
|
G |
|
|
|
Gg |
|
|||
Грані графа G: f1 (суміжні ребра e2, e3, e7), f2 (суміжні ребра e5, e3, e6), f3 (суміжні ребра e2, e1), f4 |
|||||||||||
(нескінченна грань, який суміжні ребра e1, e4, e5, e6, e6). Граням f1, f2, f3, f4 |
графа G зіставлені вершини f 1, f 2, |
||||||||||
f 3, f 4 графа Gg відповідно. Ребрам e1,…,e7 |
графа G зіставлені ребра e 1,…,e 7 графа Gg відповідно. |
||||||||||
Очевидно, граф G однозначно визначає двоїстий до нього граф Gg. Але якби ми скористалися іншим визначенням графів, то можна було б говорити про множину двоїстих до графа G графів, причому всі двоїсті до графа G графи ізоморфні. У цьому випадку можна показати результат про те, що граф, двоїстий до двоїстого графа плоского і зв'язного графа G, ізоморфний графу G.
70