

atp_shemu_1354515770
.pdf1.6 РОЗРАХУНОК РЕГУЛЯТОРУ І РЕГУЛЮЮЧОГО БЛОКУ
|
|
E(S |
|
|
в(S |
|
y(S) |
||
|
Wp(S) |
|
Wоб(S |
||||||
|
|
|
|
|
) |
|
|
||
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
y |
S |
|
Wоб (S) |
|
|
|
|
||
в |
|
|
|
|
|
|
|
||
|
1 Wоб (S) Wp (S) |
|
|
|
|
||||
1.6.1 ПЕРЕХІДНИЙ ПРОЦЕС В ЗАМКНЕНІЙ САР
в
,од.часу
y,од.ви
y1
y3
|
|
|
|
|
y2 |
,од.часу |
|
|
|
|
|
p |
|
y1 – динамічний викид |
|
|||||
|
||||||
p – тривалість перехідного процесу |
|
|||||
|
y2 |
100 |
- перерегулювання (0-100%) |
|
||
|
|
|||||
|
|
y1 |
|
|
||
|
y1 y3 |
|
- ступінь затухання (1,0- |
|
||
|
|
|||||
|
|
y1 |
|
|
||
|
p |
- інтегральний квадратичний критерій [0- (од.вих2)(од.часу)] |
||||
Ікв y2( )d |
||||||
0 |
|
|
|
|
||
11
1.6.2. РОЗРАХУНОК ПАРАМЕТРІВ РЕГУЛЯТОРУ
Тип перехідного процесу |
|
|
|
|
Параметри |
|
Бажані параметри перехідного |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
в замкненій САР при |
|
|
|
|
регулятору |
|
|
процесу |
|
|
||||||||||||
збуренні із сторони |
|
|
|
|
|
|
|
|
|
|
||||||||||||
регулюючого органу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кр |
|
|
|
|
|
|
|
Ті |
|
1, |
р, |
|
, |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
од.вих |
од.часу |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Об`єкт з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
До |
До |
|
|
|
|
самовирів- |
0,6 |
1 |
|
|
Тоб |
|
|
0,6*Тоб |
0,6*Коб* |
10*τоб |
|
0,0 |
1,0 |
||||||||
Аперіодич- |
нюванням |
|
|
Kоб |
|
|
|
об |
|
|
|
|
Δu |
(до 2*Тоб) |
|
|
|
|||||
ний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Об`єкт без |
0,6 |
|
|
1 |
|
|
|
|
|
|
|
6,0*τоб |
- |
До |
|
0,0 |
1,0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
самовирів- |
|
|
|
об |
об |
|
|
10*τоб |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
нювання |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Об`єкт з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
До |
До |
|
|
|
|
самовирів- |
|
|
1 |
|
|
|
Тоб |
|
|
0,7*Т |
|
0,4 К |
15 τ |
|
20,0 |
1,0 |
|||||
З 20%-м |
|
0,7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
* об* |
* об |
|
|
|
|
нюванням |
|
|
Kоб |
|
об |
|
|
|
|
Δu |
(до 3*Тоб) |
|
|
|
||||||||
перерегул |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
юванням |
Об`єкт без |
0,7 |
|
1 |
|
|
|
|
|
|
|
|
|
|
До |
|
|
|
||||
|
самовирів- |
об |
об |
|
|
3,0*τоб |
- |
|
20,0 |
1,0 |
||||||||||||
|
|
|
|
|
|
|
15*τоб |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
нювання |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
З |
Об`єкт з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
До |
До |
|
|
|
мінімумом |
самовирів- |
1,0 |
|
1 |
|
Тоб |
|
|
1,0*Тоб |
0,2*Коб* |
20*τоб |
|
40,0 |
0,85 |
||||||||
квадратич- |
нюванням |
|
|
|
|
|
|
|
|
|
Δu |
(до 4*Тоб) |
|
|
|
|||||||
|
Kоб |
об |
|
|
|
|
|
|
||||||||||||||
ного |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
інтеграль- |
Об`єкт без |
1,0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
об |
об |
|
|
|
|
|
|
|
|
|
||||||||||||
ного |
самовирів- |
|
|
|
|
4,0*τоб |
- |
До |
|
40,0 |
0,85 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
критерію |
нювання |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20*τоб |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.6.3 РОЗРАХУНОК РЕГУЛЮЮЧОГО БЛОКУ
Vзв |
Spo |
Kвим |
|
|
|
%ВБ |
|
;Vзв 0 |
|
|
%ВБ |
|
|
1 |
|
|
с |
|
|
|
||
|
, |
|
|
|
2,5 |
|
; n |
|
|
|
, |
|
|
; |
|
|||||||
K p |
|
с |
с |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Vзз |
|
%ВБ |
||||||||
Spo |
|
100%РО |
, |
%РО |
|
; Kвим |
|
100%ВБ |
|
, |
%ВБ |
; K p |
|
%РО |
||||||||
|
с |
|
|
|
|
|
|
од.вих |
||||||||||||||
|
|
ТВМ |
|
|
|
|
|
|
(ymax ymin ) |
од.вих |
|
|
|
|
||||||||
12
1.7 СПОСОБИ КОРИГУВАННЯ КОЕФІЦІЄНТУ ПЕРЕДАЧІ ОБ’ЄКТУ
Kоб=KТОУ*KКМ*KРО
Kоб – коефіцієнт передачі об`єкту управління
KТОУ – коефіцієнт передачі технологічного об`єкту управління
KКМ – коефіцієнт передачі кінематичного механізму «вал виконавчого механізму – вал регулюючого органу»
KРО – коефіцієнт передачі регулюючого органу
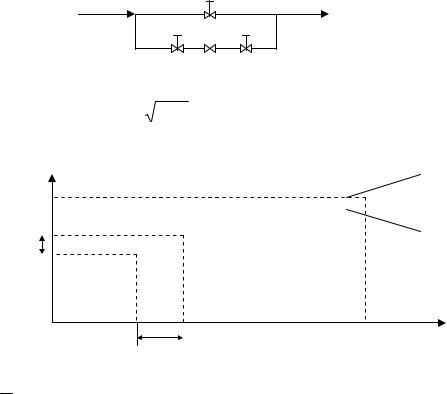
Коригування Kоб зміною KТОУ (байпасуванням витрати регулюючого середовища) В1,В2,В3 – допоміжні вентилі РО – регулюючий орган
В1
газ |
в топку |
В2 РО В3
Коригування Kоб зміною KРО (вибором робочого діапазону витратної характеристики регулюючого органу)
|
|
|
|
|
Q K F |
PPO |
|
Q |
|
|
|
|
|
нелінійна витратна |
|
100,% |
характеристика |
||||||
|
|||||||
Qmax 100 |
лінійна |
||||||
|
|
|
|
|
|
||
|
|
|
|
конструктивна |
|||
|
|
|
|
|
|||
Q |
|
|
|||||
|
|
|
|
F |
100,% |
|
|
|
100 |
||
|
|
|
|
||
F |
|
Fmax |
|||
KPO |
|
|
Q |
|
|
Q |
; |
|
- робочий діапазон регулюючого органу |
|
F |
||||||||
|
|
|
|
||||||
|
|
F |
|
|
F |
||||
Коригування Kоб зміною KКМ (вибором довжин важелів і початкових кутів взаємне розташування важелів кінематичного механізму “виконавчий механізм – регулюючий орган”)
13
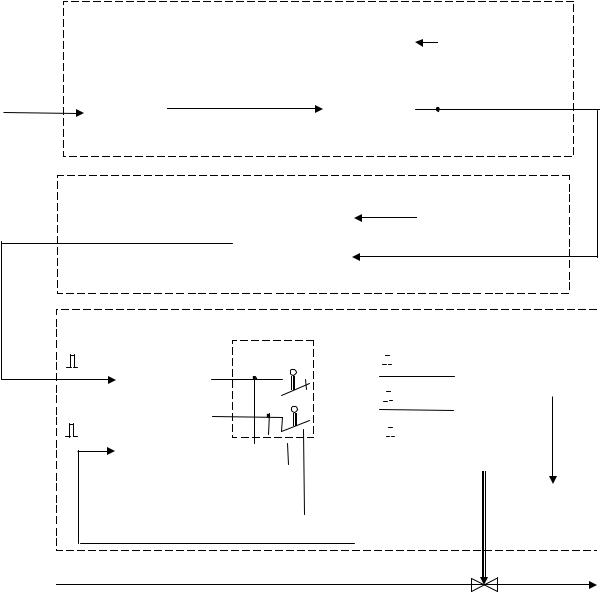
1.8 СХЕМА СТРУКТУРНА КОМЛЕКСУ ТЕХНІЧНИХ ЗАСОБІВ ПРОМИСЛОВОЇ АСР РЕЖИМНОГО ПАРАМЕТРУ
Регульований |
параметр |
Б/М
Вимірювальний канал |
ПРП |
|
=(0-5) мА, |
|
|
|
|
=(0-20) мА, |
|
|
|
|
||
|
=(0-100) мВ, |
|
|
=(4-20) мА, |
|
|
|
=(-10-0-+10)В, |
|
|
(0-300) Ом, |
|
|
|
Д |
~ (0-2) B, |
НП |
|
=(0-5) В |
|
|
|
||
|
|
|
||
|
|
|
|
|
Регулюючий канал |
+ |
РЗД |
|
|
РЕГ |
||
|
|
||
|
- |
|
|
|
|
||
|
|
|
|
|
|
|
|
Виконавчий канал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПП |
|
|
|
|
|
ВМ |
|
|
|
||||
0В |
|
ПВРУ |
|
|
КВБ |
|
|
|
|
~220/380 B |
|
20 мА, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Автомат |
|
|
|
|
|
|
Б |
|
|
|
|
|
|
~220/380 B |
Б |
|
|
~ 2 В |
|||||||||
|
|
|
|
КВМ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
0В |
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
~220/380 B |
М |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЕТ |
|
|
|
|
|||
|
|
Ручне |
|
|
П |
|
Б |
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДПП |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Регулююче середовище |
РО |
|||||||||||||||||
Д-давач НП-нормуючий перетворювач
ПРП-показуючий /реєструючий прилад РЗД-ручний задатчик РЕГ-регулюючий блок/програмований контролер
Б,М-команди (входи/виходи) БІЛЬШЕ ,МЕНШЕ ПВРУ-перемикач вибору режиму управління (АВТОМАТ/РУЧНИЙ, БІЛЬШЕ/МЕНШЕ)
ПП-підсилювач потужності КВБ,КВМ-кінцевий вимикач БІЛЬШЕ і МЕНШЕ відповідно ВМ-виконавчий механізм ЕТ-електричне гальмо РО-регулюючий орган
ДПП-дистанційний показчик положення валу ВМ/РО
14
1.9 ЗАДАЧІ РЕГУЛЮВАННЯ ТЕПЛОВОГО РЕЖИМУ ОБ’ЄКТІВ В ЕНЕРГЕТИЦІ ТА ПРОМИСЛОВОСТІ
№ |
|
|
|
|
п/п |
Функція |
Задача |
АСР |
Тип АСР |
|
|
|
режимного |
|
|
|
|
параметру |
|
1 |
2 |
3 |
4 |
5 |
1 |
Регулювання |
1.1. Стабілізація температури |
АСР |
Одноконтурна |
|
температурно |
газового середовища |
температури |
САР. |
|
го режиму |
впродовж прохідної топки |
газового |
Двоконтурна САР |
|
|
(позонна стабілізація |
середовища |
температура- |
|
|
температури) |
|
задана витрата |
|
|
1.2. Програмне регулювання |
|
палива |
|
|
( в часі) температури |
|
|
|
|
газового середовища в |
|
|
|
|
камерній топці |
|
|
2 |
Регулювання |
2.1. Стабілізація витрати |
2.1. АСР |
2.1. Одноконтурна |
|
економічності |
повіьря на значенні |
коефіцієнту |
САР |
|
згоряння |
( L0 Bn ), де Bn -поточна |
надлишку |
|
|
палива |
витрата палива, - заданий |
повітря |
|
|
|
коефіцієнт надлишку |
|
|
|
|
(витрати) повітря,L0 - |
|
|
|
|
стехіометричне |
|
|
|
|
співвідношення "повітря / |
|
|
|
|
паливо" |
2.2. АСР |
2.2. Одноконтурна |
|
|
2.2. Стабілізація витрати |
витрати |
САР |
|
|
повітря на уставці, що |
повітря |
|
|
|
визначається регулятором |
|
2.3. Двоконтурна |
|
|
температури |
2.3. АСР |
САР " вміст |
|
|
2.3. Стабілізація вмісту |
вмісту кисню |
кисню - заданий |
|
|
кисню в димових газах |
в димових |
коефіцієнт |
|
|
|
газах |
надлишку повітря |
|
|
|
|
(задана витрата |
|
|
|
|
повітря)". |
|
|
|
|
|
3 |
Регулювання |
Стабілізація розрідження |
АСР |
Одноконтурна |
|
аеродинамічн |
(тиску) в топці |
розрідження |
САР. Комбінована |
|
ого |
|
(тиску) в |
САР (з |
|
(гідравлічного |
|
топці |
компенсацією |
|
) режиму |
|
|
збурення |
|
топки |
|
|
витратою повітря) |
|
|
|
|
|
15
4 |
Регулювання |
4.1. Стабілізація рівня рідини |
4.1. АСР |
4.1. Одноконтурна |
||
|
продуктивнос |
в акумуляторному баці |
рівня |
САР. САР з |
|
|
|
ті |
(барабані котла) |
|
триім-пульсним |
||
|
|
4.2. Стабілізація швидкості |
|
регулятором |
|
|
|
|
обертання ротору турбіни |
4.2. АСР |
4.2. Двоконтурна САР |
||
|
|
|
числа обертів |
"частота |
змінного |
|
|
|
|
|
струму – потужність - |
||
|
|
|
|
число обертів ротору" |
||
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
|
|
|
|
4.3. Стабілізація тиску в |
4.3. АСР |
4.3. Одноконтурна |
||
|
|
колекторі |
тиску в |
САР. Система |
||
|
|
|
колекторі |
зв'язаного |
|
|
|
|
|
|
регулювання |
|
|
|
|
|
|
|
||
5 |
Регулювання |
5.1. Стабілізація температури |
5.1. АСР |
Двоконтурна САР ( з |
||
|
перегріву |
первинної пари |
температури |
корекцією |
|
за |
|
пари |
|
первинної |
температурою |
із |
|
|
|
проміжної |
|
точки |
||
|
|
5.2. Стабілізація температури |
пари |
|
||
|
|
об’єкту) |
|
|
||
|
|
вторинної пари |
5.2. АСР |
|
|
|
|
|
|
температури |
|
|
|
|
|
|
вторинної |
|
|
|
|
|
|
пари |
|
|
|
1.10 ПЕРЕЛІК ЗАДАЧ РІВНЯ КООРДИНАЦІЇ АСУТП (на прикладі АСУТП нагріву
слябів в методичній печі)
№ |
Функція/задача |
Система автоматичного |
п/п |
|
управління/комплекс задач |
1 |
Інформаційне супроводження слябів в |
САУ транспортування |
|
методичних печах |
слябів |
2 |
Прогноз темпу прокатки (тривалості |
Комплекс задач |
|
нагріву слябів в печах) |
прогнозування темпу |
|
|
прокатки |
3 |
Вирішення задач внутрішнього і |
Комплекс задач розрахунку |
|
зовнішнього теплообмінів |
теплообміну |
4 |
Реалізация гарантованого режиму нагріву |
САУ нагрівом слябів |
|
слябів з фіксуванням моменту виходу в |
|
|
режим витомлення |
|
5 |
Реалізація режиму нагріву слябів за |
САУ нагрівом слябів |
|
середньомасовою температурою слябів |
|
6 |
Реалізація режиму нагріву слябів за |
САУ нагрівом слябів |
|
балансовим методом |
|
7 |
Діагностування стану автоматизованого |
Комплекс задач |
|
технологічного комплексу, розрахунок |
діагностики і розрахунку |
|
техніко-економічних показників |
техніко-економічних |
|
|
показників |
16
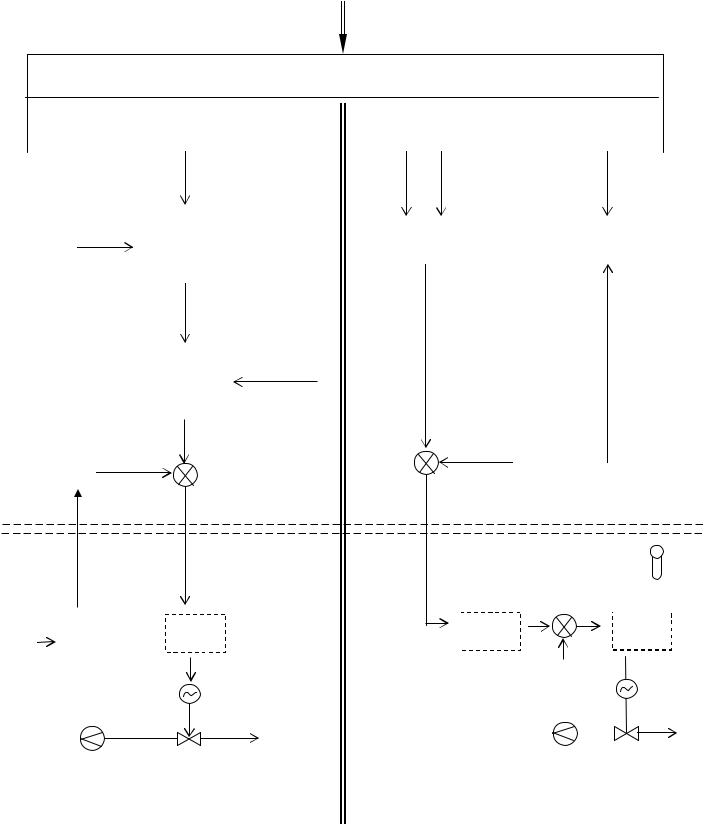
1.11 РЕАЛІЗАЦІЯ РЕЖИМУ НАГРІВУ СЛЯБІВ
Режимна карта (статична i динамiчна оптимiзацiя off–line ) Рп – продуктивнiсть, що прогнозуеться
Po – поточна продуктивнiсть
t *( )
I K O K
|
|
t *( ) |
|
t *(L) |
|
|
|
|
|
|
|
|
|
t *( ) |
t *(L) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
t *,K |
|
|
|
Pп , |
кг |
|
t *,K |
|
Po , |
кг |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
с |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
C , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дж |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
* |
* |
|
1 |
|
|
|
2 |
|
|||||||||||||
|
|
кг К |
|
* |
|
|
|
|
|
|
|
|
|
|
tг |
=f(t |
,t ,Pn) |
|
|
t =f(tг,Po) |
|
|||||||||
|
|
|
|
|
|
С t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i * , Дж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
кг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pп , |
кг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Pп i * |
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q *, Дж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
||
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qнр , Дж |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
кг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
р |
|
|
3 |
|
|
Wpп |
|
|
|
|
|
WpT |
|
|
|
|
|
|
|
|
|
Wpп |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qн |
|
Вп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВМ |
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ДФ |
|
|
|
|
|
В топку |
ГАЗ |
|
|
|
ДФ |
|
|
|
В топку |
|||||||||||||||
|
ГАЗ |
|
|
|
РО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РЕЖИМ НАГРIВУ СЛЯБIВ |
РЕЖИМ НАГРIВУ СЛЯБIВ |
||||||||||||||||||||||||||||||||||
|
ЗА БАЛАНСОВИМ МЕТОДОМ |
ЗА CЕРЕДНЬОМАСОВОЮ |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕМПЕРАТУРОЮ СЛЯБIВ |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17 |
|
|||||
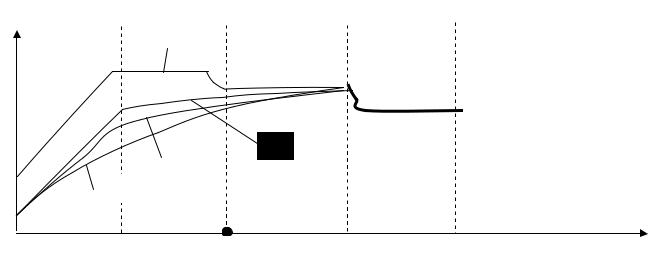
t. C
tг
tn
tc
tц
|
|
ІІз |
|
ІІІз |
IVз |
L печі, поз. |
Із |
|
|
||||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ x]
1.11.1 ГРАФІК ГАРАНТОВАНОГО НАГРІВУ СЛЯБІВ
IЗ – зона швидкого нагріву при q=const
IIЗ – зона витрати при tг*=const
IIIз – зона витомлення при tг**=const, tг** tг*
IVЗ – зона охолодження при tг***=const, tг*** tг**
tг – температура газового середовища |
|
|
|
tп– температура поверхні слябу |
|
|
|
tц– температура центру слябу |
|
|
|
tс – середньомассова температура слябу |
|
|
|
x – момент фіксації виходу слябів в режимі витомлення |
(момент x |
||
кореспондується з відповідної |
позицією нагріву в |
печі ; |
вірогідність |
правильної фіксації |
|
|
|
n
Р= (1 pi ),
i 1
де pi – вірогідність правильної фіксації моменту виходу в режим витомлення за окремою ознакою ,
n – кількість вибраних ознак, при цьому P>min{Pi})
18
1.12 СХЕМА ДВОРIВНЕВОI АСУ ТП
|
Intarnet |
|
|
|
|
|
|
|
|
|
|
|
Сервер БД |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПК |
|
|
|
|
|
|
|
|
ПК |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Field Bus |
|
|
|
|
|
|
|
Field Bus |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
… |
|
|
|
||||
|
ПЛК |
|
|
|
ПЛК |
|
PC-based |
PC-based |
||||||||||||||
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
… |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ТОК |
|
|
|
|
|
|
|
|
|
ТОК |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Сервер БД - сервер бази даних |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ПК |
- персональний компьютер |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Intranet |
- центральна обчислювальна мережа |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Field Bus |
- польова шина |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ПЛК |
- програмований логічний контролер |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
PC-based |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТОК |
- техгологічний об’єкт керування |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
19
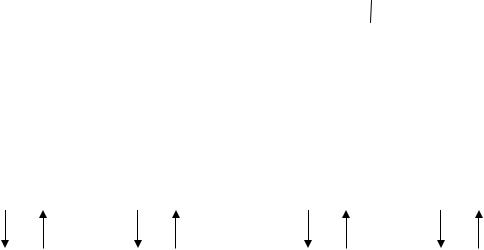
2. СХЕМИ СТРУКТУРНІ І ФУНКЦІОНАЛБНІ ТИПОВИХ АСР ПРОМИСЛОВИХ ОБ’ЄКТІВ
2.1 СТРУКТУРНА СХЕМА ОДНОКОНТУРНОЇ САР
Y* |
в |
|
н |
|
|
||
|
Wоб( |
|
|
Wр(s) |
|
y |
|
|
|
|
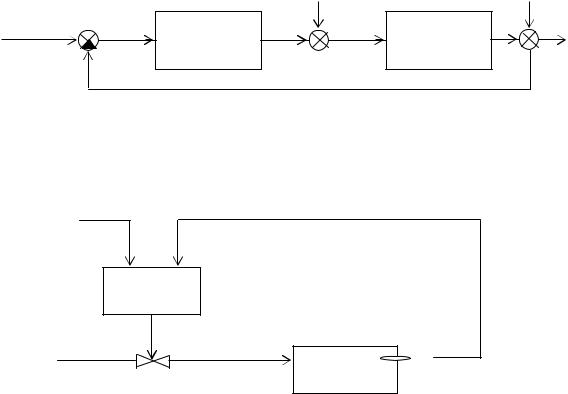
2.2 СХЕМА ФУНКЦІОНАЛЬНА АСР ТЕМПЕРАТУРИ
t*( ) t
+-
РТР
Газ РО
ТОПКА  ТП/ТО
ТП/ТО
РТР-регулятор температуры ТП/ТОтермопара/термометр опору РО-регулюючий орган
20