

ЛЕКЦИЯ 11: Примеры точечного преобразования.
План.
-
Математическое описание системы.
-
Получение закона точечного преобразования.
-
Диаграмма точечного преобразования.
-
Построение графиков переходных процессов.
-
Применение метода точечного преобразования для системы с релейной характеристикой общего вида.
В качестве первого примера рассмотрим ту же систему, что и при разборе метода припасовывания (лекция 9). Уравнения объекта и регулятора имеют вид
![]()
где F(x) — гистерезисная релейная характеристика (рис. 3.10). Эту систему уравнений перепишем в виде
![]()
На фазовой плоскости (х, у) нанесем линии переключения, соответствующие заданной нелинейной характеристике (рис. 3.10): х=b при у > 0, х = -b при у < 0. Это будут полупрямые П0 и П1 (рис. 3.11).

Рис. 3.10
Ввиду нечетной симметрии характеристики F (х) можно рассматривать только участок фазовой траектории QQ1, идущий от полупрямой П0 до П1,так как закон возвращения этой траектории к линии П0 будет аналогичен. Таким образом, будем рассматривать точечное преобразование полупрямой П0 в полупрямую П1 (а не саму П0 в себя, как ранее). При этом исходная точка Q имеет последующую Q1.
Пусть в точке Q будет t=0, а в точке Q1 обозначим t=. На участке фазовой траектории QQ1 имеем F(x)= с. Поэтому уравнения (3.17) принимают вид
![]()
Интегрирование их дает

Используем здесь параметрический способ точечного преобразования. Обозначим ординаты точек Q и Q1 через у0 и y1 соответственно. Закон точечного преобразования будем искать в виде функций у0() и у1(). При начальных условиях (точка Q) t=0, х=b, у=у0 определяются произвольные постоянные в (3.18) и (3.19):
![]()
В точке Q1 имеем t=, х= -b, у= у1. Подставляя эти величины в уравнение (3.18), получаем
![]()

Рис. 3.11.
А подстановка в уравнение (3.19) даёт
![]()
Из последнего уравнения непосредственно находим

Тогда из (3.20) с учетом (3.21) получим
![]()
Формулы (3.21) и (3.22) и являются искомым законом точечного преобразования в параметрической форме.
Построим диаграмму (рис. 3.12) точечного преобразования в виде кривых у0() и у1() - (Переменная у1 берется по абсолютному значению, так как она отрицательна). Здесь в одном графике отражено все протекание переходного процесса (обозначено стрелками) и периодическое решение - точка пересечения кривых. При этом в переходном процессе найдены последовательные значения ординат у0 и у1, а также времена движения на

Рис. 3.12.

Рис. 3.13.
каждом участке, а в периодическом режиме — амплитуда у* и полупериод Т.
На рис. 3.13 показаны точки образующей переходных колебаний, взятые из диаграммы точечных преобразований (рис. 3.12). Дальше эти точки соединяются экспонентами (рис. 3.14) согласно уравнению (3.18). Таким образом, в виде единого простого геометрического построения здесь решается вся задача припасовывания решений по

Рис. 3.14.

Рис. 3.15.
участкам для переменной у. Затем, имея длины участков 1, 2, 3, ... и зная, что на границах участков х= ±b, легко по уравнению (3.19) построить также и кривую переходного процесса для переменной х (рис. 3.15, где х*—амплитуда автоколебаний). Аналогично получается и затухающий процесс (выше точки у*, рис. 3.12).
В качестве второго примера возьмем ту же систему (3.17), но с релейной характеристикой общего вида (рис. 3.16). Здесь на фазовой плоскости получаем четыре линии переключения (рис. 3.17).
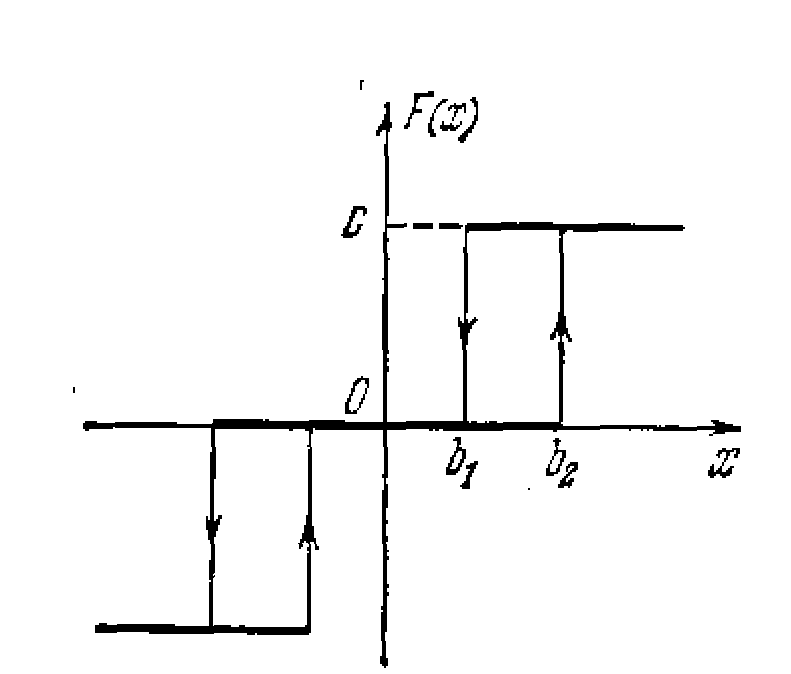
Рис. 3.16.

Рис. 3.17.
Ввиду нечетной симметрии характеристики F(x) достаточно рассмотреть участок фазовой траектории QQ1Q2, идущий от линии П0 через П1 до линии П2. При этом часть Q1Q2 фазовой траектории будет прямолинейная, так как там F(х)=0, и в силу (3.17)
![]()
Итак, будем рассматривать точечное преобразование полупрямой П0 в полупрямую П2 при условии, что последующая точка Q2 находится на линии П2. Но существуют фазовые траектории Q' Q1'Q2' у которых последующая точка Q2' находится не на линии П2, а на отрезке –b2<х <b1. Следовательно, надо будет также рассмотреть точечное преобразование части полупрямой П0 и в этот отрезок.
Начнем с первого случая (QQ1Q2). На участке QQ1, где F(x)= с, имеем решения уравнений (3.17) в виде
![]()
В силу начальных условий t=0, х= b2, у=у0 находим
![]()
В точке Q1 имеем: t = 1, х= b1, у=у1. Поэтому из (3.24) получаем

откуда находим

Используем далее уравнение (3.23) для участка траектории Q1Q2. С учетом начальных условии
![]()
найдем произвольную постоянную

В точке Q2 имеем t=, х= -b2, у =у2. Поэтому из (3.23) получаем

или, согласно (3.26),

Мы получили параметрические выражения (через параметр 1) ординат исходной у0 (3.25) и последующей у2 (3.30) точек. Это позволяет построить диаграмму точечного преобразования в параметрической форме (рис. 3.18). Параметр 1 в данном случае обозначает не все время движения от Q1 до Q2, а лишь время движения для траектории (QQ1).
Чтобы определить время для всей траектории QQ1Q2, решим первое уравнение (3.17) на участке Q1Q2, где F(х)=0. Получим
![]()
Из начальных условий (3.27.) следует
![]()
а в точке Q2
![]()
![]()

Зная из диаграммы (рис. 3.18) значения у2 и 1 для каждого шага точечного преобразования, можем по формуле (3.31) подсчитать и время для этого шага.

Рис. 3.18.
Так определяется
переходный процесс, когда точка Q2
находится
на линии П2.
Предельное (нижнее) положение исходной
точки Q0,
при котором это справедливо, найдется
из диаграммы (рис. 3.18) при
![]() ,
как показано
,
как показано
штриховой линией.
Это будет значение
![]() .
Следовательно, при ординате
.
Следовательно, при ординате
![]() исходной точки Q
выражение (3.30) надо заменить другим.
Здесь последующая точка Q2
(рис. 3.17)
определяется абсциссой х2.
Поскольку в точке
исходной точки Q
выражение (3.30) надо заменить другим.
Здесь последующая точка Q2
(рис. 3.17)
определяется абсциссой х2.
Поскольку в точке
![]() имеем у=0, то из (3.23) и (3.28) находим
имеем у=0, то из (3.23) и (3.28) находим
![]()
Следовательно,
для каждой точки кривой y0(1),
лежащей на диаграмме (рис. 3.18) ниже
точки
![]() берем на оси абсцисс значение 1.
Для него
но формуле (3.26) вычисляем у1,
а затем х2
(3.32). Если при этом окажется
берем на оси абсцисс значение 1.
Для него
но формуле (3.26) вычисляем у1,
а затем х2
(3.32). Если при этом окажется
![]() ,
то процесс заканчивается равновесным
состоянием системы внутри зоны
нечувствительности релейной
характеристики.
,
то процесс заканчивается равновесным
состоянием системы внутри зоны
нечувствительности релейной
характеристики.