

ЛЕКЦИЯ 1. Виды и особенности нелинейных систем.
План.
-
1. Понятие нелинейной системы.
2. Статические нелинейности.
3. Динамические нелинейности.
Система автоматического управления или регулирования называется нелинейной в том случае, если хотя бы одно звено системы описывается нелинейным уравнением (обладает нелинейной характеристикой). В первой части курса изучались линейные системы как обыкновенные, так и другие (с запаздыванием, с распределенными параметрами, с переменными параметрами и дискретные). Система любого из этих видов становится нелинейной, если хотя бы в одном звене системы имеется какое-либо отклонение от линейной зависимости. Поэтому класс возможных нелинейных систем весьма широк.
Строго говоря, все реальные системы являются в большей или меньшей степени нелинейными. Однако во всех случаях, когда с инженерной точки зрения допустимо рассматривать линеаризованную систему, обращаются к линейной теории как более простой и более разработанной. И только тогда, когда нелинейность играет существенную роль в поведении системы, прибегают к теории нелинейных систем. Последняя становится все более важной для практики по мере повышения требований к качеству процессов и к точности расчета систем автоматического управления и регулирования. Можно различать статические и динамические нелинейности.
Статические
нелинейности
— это нелинейности статических
характеристик.
Они могут
быть непрерывными (рис. 1.1), или релейными
(рис. 1.2). С другой стороны, они могут быть
однозначными (рис. 1.1 и 1.2), петлевыми
гистерезисными (рис. 1.3) или опережающими
(рис. 1.4). Па рисунках даны примеры
аналитического описания статических
нелинейностей.

Нелинейные статические характеристики могут иметь и более сложный вид, как это показано, например, на рис. 1.5. а) Комбинация релейной и линейной характеристик; б) характеристика расхода газа х2 при разных давлениях в зависимости от открытия клапана х1 в) зависимость скорости

Рис. 1.2.
привода х2 от управляющего сигнала х1 при разных нагрузках; г) зависимость между моментом и угловой скоростью электродвигателя при разных напряжениях.
Динамические нелинейности — это нелинейности, связанные с дифференциальными уравнениями динамики звена. К ним относится, например, нелинейное трение. Так, нелинейная сила вязкого трения характеризуется выражением
![]()
Сила сухого трения в простейшем случае (имеются и более сложные зависимости) описывается соотношением

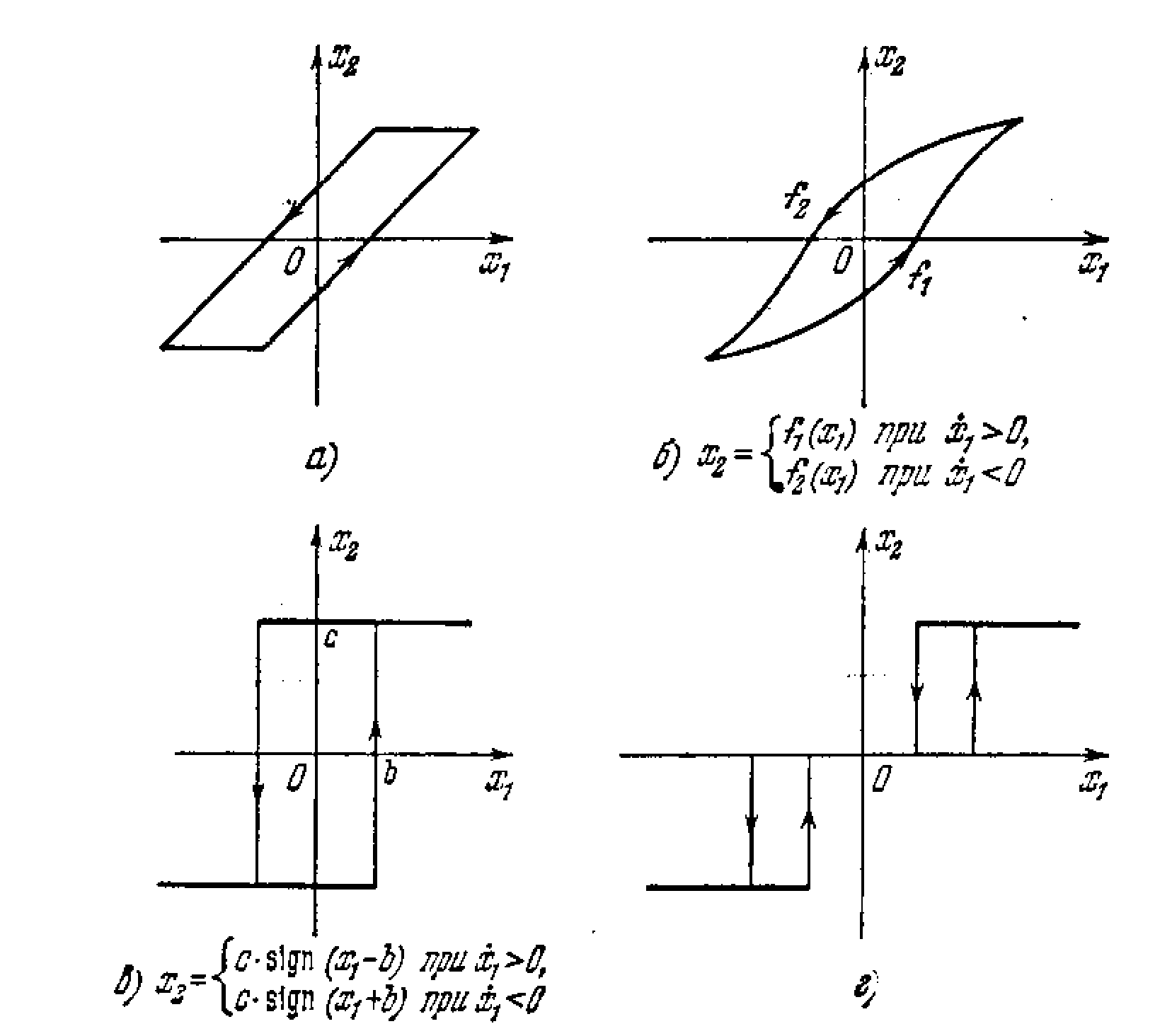
Рис. 1.3.
Звено с изменяющейся постоянной времени имеет вид
или же


Рис. 1.4.

Рис. 1.5.
Здесь надо отметить особенность такой динамической нелинейности по сравнению с линейным звеним с переменным параметром вида
![]()
В системе с переменными параметрами фигурирует зависимость коэффициентов от времени, в то время как нелинейность характеризует их зависимость от координат (или производных). Точно так же, например, гистерезис (рис. 1.3) представляет собой нелинейное (координатное) запаздывание, в отличие от временного или инерционного в линейных системах. Аналогично на рис. 1.4 представлено нелинейное (координатное) опережение.
Конечно, -могут быть нелинейные звенья с переменным параметром, например вида
![]()
а также нелинейные запаздывающие звенья типа
![]()
Примерами динамических нелинейностей могут служить также любые нелинейные дифференциальные, разностные и интегральные уравнения.
Нелинейности в системах управления и регулирования могут быть естественно присущими реальной системе (трение, люфт, гистерезис, зона нечувствительности, насыщение) и зачастую вредными; влияние их в этом случае надо стремиться уменьшить. Но могут быть и специально вводимые нелинейности для придания системе желаемых свойств. Таковы, например, релейные элементы и различные нелинейные и псевдолинейные корректирующие устройства. Большой интерес представляют также логические нелинейные управляющие блоки и системы с переменной структурой, о которых речь будет в последующих главах. Оптимизация систем автоматического управления также в большинстве случаев связана с введением специальных нелинейностей в контур системы. Введение специальных нелинейностей приводит к различным нелинейным законам управления, которые обладают более богатыми возможностями по сравнению с линейными.