

•Операторная функция передачи
(ОФП)
Получаем из дифференциального уравнения:
Уравнение в операторной форме после замены:
a0 pn y p +a1 pn−1 y p +a2 pn−2 y p ...+an y p = =b0 pm x p +b1 pm−1 x p . .. +bm x p

•Операторная функция передачи
(ОФПa0 pn y p) +a1 pn−1 y p +a2 pn−2 y p ...+an y p = =b0 pm x p +b1 pm−1 x p . .. +bm x p
Вынесем y(p) и x(p) за скобки:
y p a0 pn +a1 pn−1 +a2 pn−2 . . .+an = =x p b0 pm +b1 pm−1 . .. +bm
Запишем ОФП:
W p = |
y p |
= |
b0 pm+b1 pm−1 |
.. .+bm |
|
x p |
a0 pn +a1 pn−1 +a2 pn−2 .. .+an |
||||
|
|
||||

Типовые звенья САУ и их
•Звеньяхарактеристикис математическим описанием обыкновенными дифференциальными
уравнениями первого и второго порядка называются типовыми динамическими звеньями.
•Из типовых динамических звеньев составляются алгоритмические структурные схемы систем управления.
•Знание характеристик типовых звеньев значительно облегчает изучение свойств таких систем.

Типовые звенья САУ и их
• характеристики
Классификацию типовых звеньев удобно осуществить, рассматривая различные
частные случаи общего дифференциального
уравнения: |
|
dy(t) |
|
|
|
dx(t) |
|
|
a |
d 2 y(t) |
a |
a |
|
y(t) b |
b x(t) |
||
0 dt2 |
|
|
|
|||||
|
1 dt |
|
2 |
0 dt |
1 |
|||
В операторной форме:
a0 p2 y( p) a1 py( p) a2 y( p) b0 px( p) b1x( p)

Типовые звенья САУ и их характеристики
•Вынесем x(p) и y(p) за скобки:
y( p)(a0 p2 a1 p a2 ) x( p)(b0 p b1 )
•Передаточная функция в общем виде для типовых звеньев САУ:
W ( p) |
y( p) |
|
|
|
b0 p b1 |
|
x( p) |
a |
0 |
p2 a p a |
2 |
||
|
|
|
|
1 |

Типовые звенья САУ и их
• характеристики
Принято уравнение:
|
y( p)(a |
0 |
p2 |
a p a |
) x( p)(b p b ) |
|||||||||
• |
|
|
|
|
1 |
|
|
2 |
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
): |
|
|
записывать в виде (разделив на |
|||||||||||||
|
y( p)(T 2 p |
2 T p 1) x( p)K( p 1), |
||||||||||||
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
•где T 2 |
a0 |
, |
T |
a1 |
, |
K |
b1 |
, |
b0 . |
|||||
|
|
|||||||||||||
|
2 |
a2 |
|
1 |
|
a2 |
|
|
a2 |
|
b1 |
|||
|
|
|
|
|
|
|
|
|||||||
•Параметры T2, T1, называются
постоянными времени, измеряемыми в секундах;
•K называется коэффициентом передачи.

Типовые звенья САУ и их
характеристики
•Передаточная функция из уравнения:
y( p)(T22 p2 T1 p 1) x( p)K( p 1)
•в общем виде для типовых звеньев САУ:
W ( p) |
y( p) |
|
K ( p 1) |
|
||
x( p) |
T 2 p2 |
T p 1 |
||||
|
|
|||||
|
|
|
2 |
1 |
|
|

Типовые звенья САУ и их
•Типовыехарактеристикидинамические звенья делятся по зависимостям выходной величины y от входного воздействия x в установившихся режимах работы на:
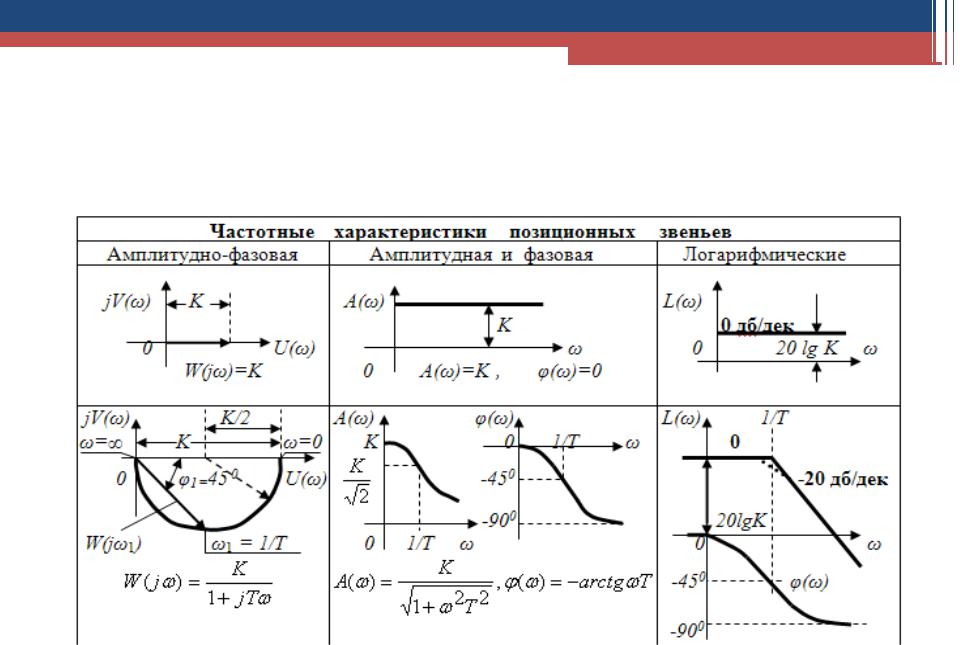
•позиционные, в которых выходная величина пропорциональна входному воздействию y=Kx;
•интегрирующие, в которых выходная величина пропорциональна интегралу от входного воздействия y=K∫xdt;
•дифференцирующие, в которых выходная величина пропорциональна дифференциалу (первой производной по времени) от входного воздействия y=K dx/dt;
•запаздывающие, в которых выходная величина равна входной величине, сдвинутой в текущем

Типовые звенья САУ и их
•Подробнохарактеристикина лабораторных работах.
•Пример:
Типовые звенья САУ и их
•Подробнохарактеристикина лабораторных работах.
•Пример: