

3. Объект исследования. Описание компоновки, устройства, пневматической схемы и программирования робота рф-201 м
3.1. Назначение робота рф-201 м
Промышленный робот РФ-201 М предназначен для автоматизации
процессов загрузки и разгрузки заготовок в механосборочном и штамповочном производствах.
3.2. Техническая характеристика промышленного робота рф-201 м
|
Грузоподъемность |
2,5Н |
|
Погрешность позиционирования |
|
|
Максимальные транспортирующие перемещения: | |
|
- вертикальное |
50мм |
|
- горизонтальное |
200мм |
|
- поворот |
98º |
|
- ротация руки робота относительно горизонтальной оси |
180 º |
|
Величина регулировок перемещений: | |
|
- горизонтального |
2,5 мм |
|
- поворота |
8 º |
|
Время перемещений: | |
|
- вертикального |
0,6с |
|
- горизонтального |
0,6с |
|
- поворота |
0,8с |
|
- ротации |
0,5с |
|
- зажима, разжима |
0,3с |
|
Тип привода |
пневматический |
|
Тип системы управления |
цикловой |
|
Рабочее давление воздуха |
0,4…0,6 Мпа |
|
Длительность цикла работы робота (без пауз и выстоев) |
12с |
|
Максимальное число переходов в цикле |
30 |
|
Максимальное число единиц обслуживаемого оборудования |
2 |
|
Масса робота |
20кг |
|
Масса узла подготовки воздуха |
4кг |
|
Масса распределительного устройства |
8 кг |
|
Габариты робота |
470×235×248 мм |
|
Габариты узла подготовки воздуха |
375×155×230 мм |
|
Габариты распределительного устройства |
604×182×306мм |
3.3. Описание конструкции робота
Изучаемый робот РФ-201 М относится к первому поколению роботов, поскольку он работает по жесткой программе от командоаппарата.
Промышленный робот РФ-201 М состоит из трех отдельных блоков: непосредственно робота, распределительного устройства (устройства управления с командоаппаратом) и узла подготовки воздуха.
Общий вид непосредственно робота представлен на рис.2. Робот содержит корпус, представляющий собой литую конструкцию из чугуна. Корпус имеет две базовые плоскости, любой из которых он может крепиться к технологическому оборудованию.
Внутри корпуса расположены механизмы, подъема и поворота колонны 4 с зажимом 5, в котором устанавливается рука робота 8. Рука содержит механизм горизонтального перемещения и снабжена механизмом ротации 7 (поворота охвата вокруг горизонтальной оси) и охватом 1. Движения робота ограничиваются конечными упорами. Величина горизонтального перемещения регулируется в пределах 2,5 мм путем вращения гайки 2, положение которой фиксируется контргайкой 3. Величина поворота регулируется специальными
конечными упорами, расположенными внутри корпуса. Кроме того, ослабляя винты зажима 5, можно регулировать вылет руки робота.
3.4. Описание пневматической схемы промышленного робота рф-201 м
Пневматическая схема промышленного робота РФ-201 М представлена на рис.3. Питание схемы сжатым воздухом осуществляется от цеховой пневмосети через узел подготовки воздуха, содержащий влагоотделитель ВД для отделения излишней влаги, редукционный клапан КР, служащий для установки необходимого рабочего давлений воздуха, манометр М – для контроля этого давления, маслораспылитель MP – для смешивания воздуха со смазывающим внутренние поверхности цилиндров маслом и обратный клапан КО, обеспечивающий неподвижность робота при падении давления в сети.
От
узла подготовки воздух подается в
распределительное устройство, которое
содержит электродвигатель
![]() ,
,
![]() с редуктором
с редуктором ![]() ,
который через зубчатую передачу
,
который через зубчатую передачу ![]() вращает барабан командоаппарата КА,
имеющий на своей внешней поверхности
30 продольных пазов. В пазы на барабане
вставляются пластмассовые кулачки,
служащие для нажима рычагов,
переключающих реверсивные пневмозолотники
P1…Р5.
Каждый
из
этих пневмозолотников управляет одним
из перемещений звеньев робота путем
подачи воздуха в соответствующие
пневмоцилиндры (Ц1…Ц6). На валу
командоаппарата имеется также барабан
с 30 пазами, в которые вставляются кулачки,
вызывающие переключения путевых
переключателей SQ1…SQ3.
вращает барабан командоаппарата КА,
имеющий на своей внешней поверхности
30 продольных пазов. В пазы на барабане
вставляются пластмассовые кулачки,
служащие для нажима рычагов,
переключающих реверсивные пневмозолотники
P1…Р5.
Каждый
из
этих пневмозолотников управляет одним
из перемещений звеньев робота путем
подачи воздуха в соответствующие
пневмоцилиндры (Ц1…Ц6). На валу
командоаппарата имеется также барабан
с 30 пазами, в которые вставляются кулачки,
вызывающие переключения путевых
переключателей SQ1…SQ3.
Переключатель SQ1 используется для остановки барабана в цикле, дальнейшее вращение барабана включается либо после нажатия оператором специальной кнопки (в ручном режиме работы),

Рис. 2. Общий вид промышленного робота РФ-201 М
либо после прихода сигнала об окончании работы с внешнего технологического оборудования. После этого барабан вновь начинает вращаться и цикл продолжается.
Переключатели SQ2 и SQ3 служат для выдачи сигналов на включение внешнего технологического оборудования.
При отсутствии кулачка, в пазе пневмозолотник под действием пружины находится в крайнем правом положении, в результате воздух поступает в полости пневмоцилиндров, устанавливающих
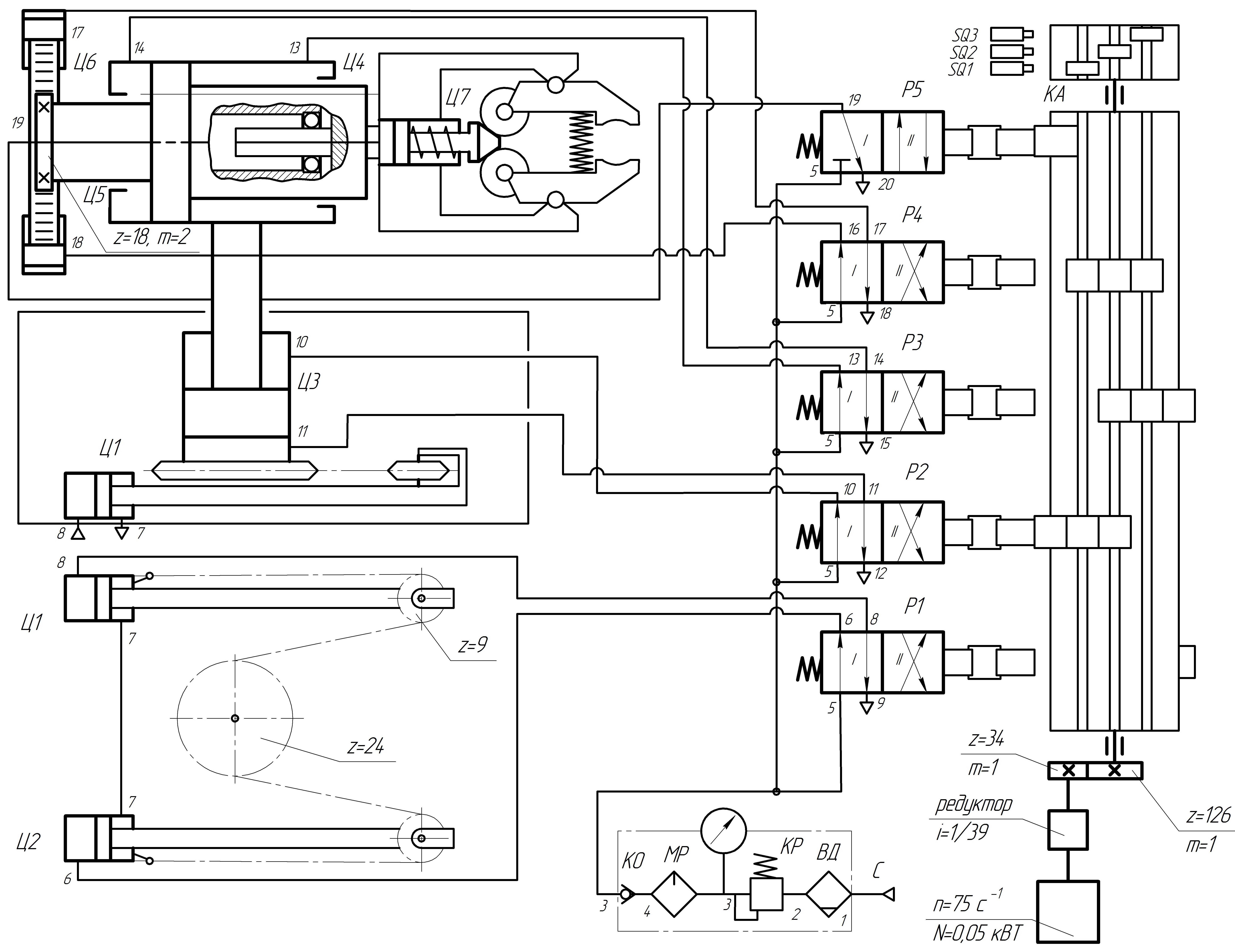
Рис. 3. Пневмокинематическая схема промышленного робота РФ-201М
соответствующий орган робота в исходное положение. Таким положением манипулятора является нижнее положение с рукой, перемещенной назад, повернутой против часовой стрелки с открытым охватом. При наличии кулачка пневмозолотник переходит в крайнее левое положение и осуществляется перемещение соответствующих органов робота. Поскольку барабан вращается с постоянной скоростью, то количеством кулачков на каждом перемещении можно задавать время выстоя каждого органа в одном из крайних положений. Рассмотрим пневмопотоки, возникающие при выполнении роботом различных движений.
3.4.1. Поворот руки по часовой стрелке
Под действием кулачка на барабане командоаппарата пневмозолотник P1 переключится в положение II (P1←II). При этом возникает следующий поток воздуха:
![]()
![]() 6 (Р1-2) 9 (А)
6 (Р1-2) 9 (А)
Поршень
цилиндра Ц1 перемещается вправо, а
цилиндр Ц2
– влево.
В результате под действием цепной
передачи, ведущие звездочки которой
![]() закреплены
на штоках цилиндров Ц1 к Ц2, а ведомая
звездочка
закреплены
на штоках цилиндров Ц1 к Ц2, а ведомая
звездочка ![]() установлена на колонне руки робота,
рука робота поворачивается по часовой
стрелке до регулируемого упора.
установлена на колонне руки робота,
рука робота поворачивается по часовой
стрелке до регулируемого упора.
3.4.2. Поворот руки против часовой стрелки
При отсутствии кулачка на барабане командоаппарата пневмозолотник P1 под действием пружины возвращается в положение I, и воздух начинает поступать в левую полость цилиндра Ц2, затем из правой полости Ц2 – в правую полость Ц1, а из левой полости Ц1 через Р1 – в атмосферу. В результате поршень Ц2 перемещается вправо, а Ц1 – влево, и рука поворачивается против часовой стрелки.
3.4.3. Движение руки вверх
Кулачок на барабане перемещает пневмозолотник Р2 в положение II, сжатый воздух поступает в нижнюю полость цилиндра ЦЗ, в результате колонна вместе с рукой робота перемещается вниз.
3.4.4. Движение руки вниз
При отсутствии кулачка в пазу барабана Р2 под действием пружины возвращается в положение I, воздух поступает в верхнюю полость цилиндра Ц3, и колонна с рукой опускаются вниз.
3.4.5. Движение руки вперед
Кулачок на барабане перемещает пневмозолотник РЗ в положение II, воздух поступает в левую полость цилиндра Ц4, в результате чего рука выдвигается вперед.
3.4.6. Движение руки назад
При отсутствии кулачка в пазах барабана РЗ под действием пружины возвращается в положение I, воздух начинает поступать в правую полость цилиндра Ц4, в результате чего рука перемещается назад.
3.4.7 Ротация схвата робота по часовой стрелке
Кулачок
на барабане командоаппарата перемешает
пневмозолотник Р4 в положение II,
воздух поступает в цилиндр Ц6, а из Ц5
стравливается в атмосферу. Поршень
цилиндра Ц6 воздействует на шток-рейку,
которая находится в зацеплении с зубчатым
колесом
![]() ,
установленным на поворотной части руки
робота, в результате осуществляется
ротация охвата руки робота по часовой
стрелке.
,
установленным на поворотной части руки
робота, в результате осуществляется
ротация охвата руки робота по часовой
стрелке.
3.4.8. Ротация схвата робота против часовой стрелки
При отсутствии кулачка в пазу барабана Р4 под действием пружины возвращается в положение I, воздух поступает в цилиндр Ц5, а из цилиндра Ц6 – стравливается в атмосферу. Шток-рейка перемещается вверх, и осуществляется ротация схвата руки робота против часовой стрелки.
3.4.9. Зажим схвата
Под действием кулачка на барабане командоаппарата пневмозолотник Р5 перемещается в положение II, воздух от узла подготовки поступает во внутреннюю полость руки робота и через специальную трубку, обеспечивающую подачу воздуха к схвату при выдвижении руки, воздух подается в цилиндр Ц7. Шток цилиндра Ц7 перемещается вправо, конус, укрепленный на штоке, воздействует на ролики губок схвата, в результате схват зажимает заготовку.
3.4.10. Разжим схвата
При отсутствии кулачка пневмозолотник Р5 под воздействием пружины возвращается в положение I. Воздух из цилиндра Ц7 стравливается в атмосферу. Под действием пружины шток цилиндра Ц7 вместе с конусом перемещается влево и пружина разжимает губки схвата.