

Приложение б
Форма бланка отчёта по лабораторной работе
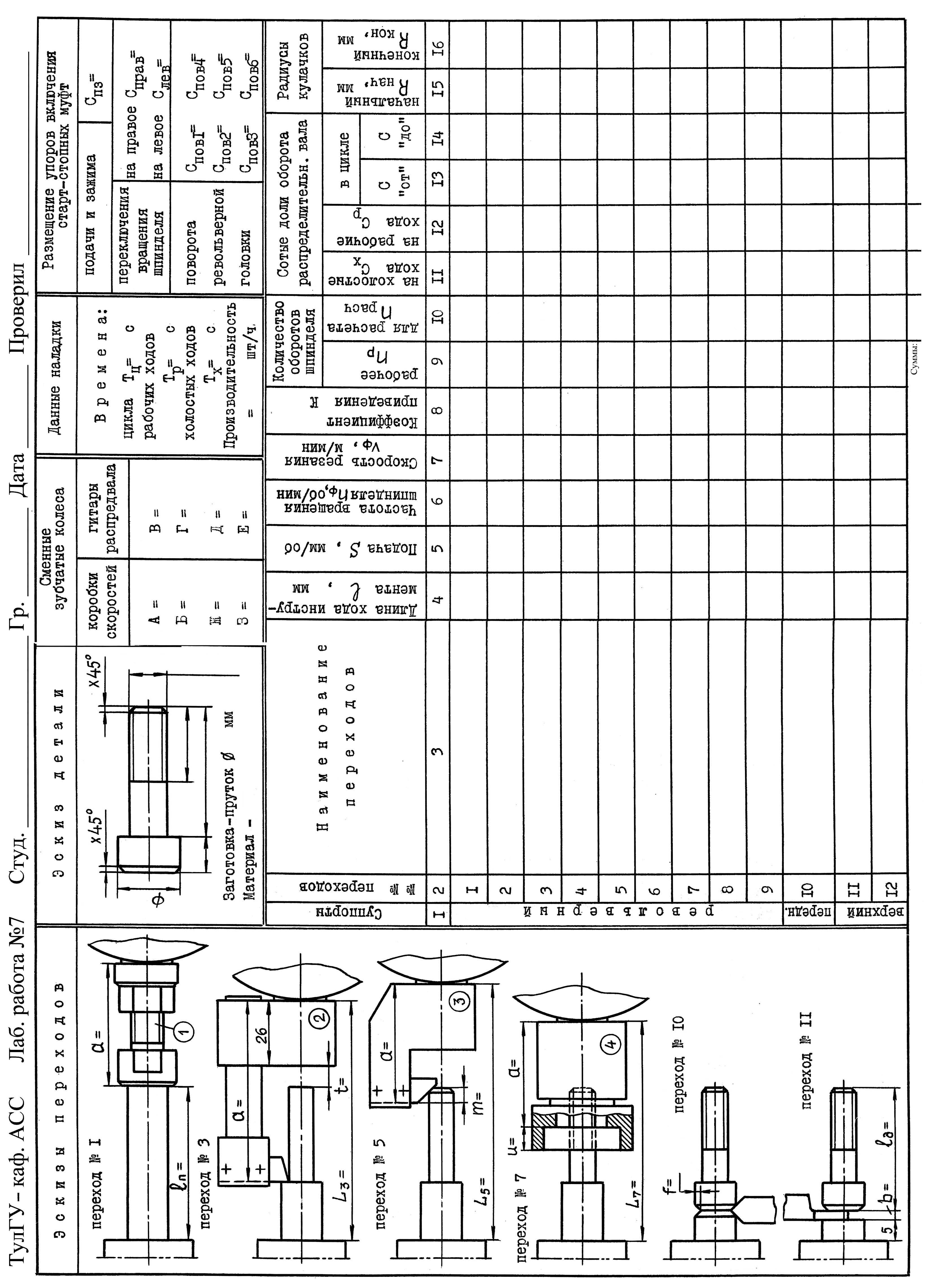
Первая сторона листа
Вторая сторона листа

НАСТРОЙКА И НАЛАДКА ПРОМЫШЛЕННОГО РОБОТА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ЛАБОРАТОРНОЙ РАБОТЕ № 2
1. ЦЕЛЬ И ЗАДАЧИ РАБОТЫ
Цель работы
Изучить устройство, пневмокинематическую схему, работу и программирование робота РФ-201 М.
Задачи работы
Изучение компоновки, устройства, пневмокинематической схемы и порядка программирования промышленного робота РФ-201М.
Расчет числа степеней подвижности и определение рабочей зоны робота.
Разработка планировки роботизируемого участка и программы управления промышленным роботом.
Ознакомление с наладкой, набором программы и работой промышленного робота.
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ ОБ ОСНОВНЫХ ПАРАМЕТРАХ ПРОМЫШЛЕННЫХ РОБОТОВ
Основными параметрами любого промышленного робота являются грузоподъемность, число степеней подвижности, рабочая зона, компоновочная схема и точность позиционирования.
Под грузоподъёмностью робота подразумевается суммарная грузоподъемность его рук. Грузоподъемность руки робота – это наибольшая сила, развиваемая в любом положении.
Число степеней подвижности определяется как сумма всех возможных движений кисти руки робота без учета движения захвата (зажима) детали. Расчет числа степеней подвижности осуществляется по формуле Малышева, которая имеет вид
![]() (1)
(1)
где
![]() – общее число кинематических пар;
– общее число кинематических пар;
![]() – количество кинематических пар 5-го,
4-го и 3-гоклассов соответственно.
– количество кинематических пар 5-го,
4-го и 3-гоклассов соответственно.
Кинематическая пара 5-го класса лишает звено пяти независимых перемещений, 4-го – четырех, 3-го – трех.
В
качестве примера расчета
числа степеней
подвижности рассмотрим робот, структурная
схема которого приведена на рис.1. Робот
имеет 3 кинематические пары 5-го класса
– 2
поступательного
движения и 1 вращательного движения,
кроме того, имеется пара 3-го класса –
шаровой шарнир. Общее число, кинематических
пар ![]() .
Тогда
.
Тогда ![]() ,
,
![]() ,
и число
степеней подвижности будет
,
и число
степеней подвижности будет
![]()
Рабочей
зоной (рабочим объемом) называется
пространство, в котором при работе может
находиться захват манипулятора. При
этом рабочая зона может быть либо
свободной (в ней не находятся какие-либо
предметы), либо несвободной (в ней
присутствуют
какие-либо элементы обслуживаемых
станков или другие предметы). Размеры
рабочей зоны характеризуются как
размерами конструктивных элементов
робота, так и величинам перемещений его
звеньев (длинами ![]() ,
, ![]() и углами
и углами ![]() –
на примере рис.1). Форма рабочей зоны
определяется компоновочной схемой
робота.
–
на примере рис.1). Форма рабочей зоны
определяется компоновочной схемой
робота.
Каждый робот характеризуется максимальной и реальной рабочими зонами. Максимальная рабочая зона имеет место при максимально возможном перемещении звеньев. Реальная рабочая зона – зона, существующая при настройке на заданное перемещение звеньев робота.
Компоновочная схема определяет кинематические и функциональные возможности робота. Компоновочные схемы классифицируются в зависимости от применяемой системы координат основных перемещений. Классификация компоновочных схем представлена в табл.1. К 1-й и 2-й группам отнесены роботы, имеющие перемещения в декартовой системе координат. К3-й, 4-й и 5-й группам отнесены роботы, имеющие перемещения в полярной системе координат, к 6-й и 7-й группам относятся роботы с шарнирной плечелоктевой конструкцией руки, имеющие перемещения в сложной полярной системе координат.

Рис. 1. Пример структурной схемы промышленного робота
Таблица 1
|
Система координат основных движений |
Схема системы координат | |
|
Декартова |
плоская |
|
|
пространственная |
| |
|
Полярная |
плоская |
|
|
цилиндрическая |
| |
|
сферическая |
| |
|
Сложная полярная |
цилиндрическая |
|
|
сферическая |
| |






