

Чаще всего применяют 2-х скоростные двигатели: 1500 – 3000, 750 – 1500, 500 – 1000; 3-х скоростные: 750 – 1500 – 3000 об/мин; 4-х скоростные: 375 – 750 – 1500 – 3000 об/мин.
В электродвигателях постоянного тока регулирование ведётся за счёт изменения напряжения в цепи возбуждения статора.
Ч
φ
= 1,12; 1,06
Двухскоростной электродвигатель можно условно
рассматривать как «электрическую группу» состоящую из 2-х передач.
Характеристика группы хэ определяется так:
хэ
= lg2/lg
φ
|
φ |
1,12 |
1,26 |
1,41 |
2,0 |
|
хэ |
6 |
3 |
2 |
1 |
Пример:
Пусть задано z = 12; φ = 1,26.
Принимаем 2-х скоростной электродвигатель переменного тока.
φ = 1,26; хэ = 3.
Для обычной коробки: z = 12 = 31 · 23 · 26.
Для нашего случая: z = 23 · (31 · 26).




 I
II
III
I
II
III
n12

 n11
n11





 n10 n9
n10 n9





 n8
n8


 n7
n7



 n6
n6



 n5
n5

 n4
n4
n3
 n2
n2

 n1
n1
хэ = 3
х1 = 1 х2 = 6
Механизмы переключения передач в станках с чпу и с ручным переключением
В станках с ЧПУ в качестве механизмов для переключения передач применяют электромагнитные муфты.
С












































































































 хема
селективного (избирательного) переключения
передач
хема
селективного (избирательного) переключения
передач

3










 6 8 7
6 8 7
2
 5
5


 9
9




















































1



 4 10
4 10
Рычаги 3 и 7 нижними концами жёстко связаны с колёсами 4 и 8, находящимися в зацеплении с зубчатыми рейками 2, 5, 6, 9. Последние могут по высоте занимать 3-и положения, в зависимости от наличия под хвостовиками торцевой плоскости, отверстий и потайных площадок диска 1. Для установки конкретной скорости диск при помощи зубчатого сектора 10 и рейки отводят вниз, поворачивают и вновь возвращают к рейкам 2, 5, 6, 9, устанавливая их в соответствующее положение.
9.3. Несущая система станков. Назначение несущей системы, основные проектные критерии
Несущая система служит для создания требуемого пространственного размещения узлов, несущих инструмент или деталь и обеспечивает точность их взаимоного расположения под нагрузкой.
К несущей системе относят: станины, основания, колонны, стойки, поперечины, ползуны, траверсы, столы, каретки, суппорты, планшайбы, корпуса шпиндельных бабок и т.п.
Несущая система должна обеспечивать:
высокую жесткость.
высокие демфирующие свойства, т.е. способность гасить колебания между инструментом и заготовкой от действия различных источников вибраций.
долговечность, выражающуюся в стабильности формы деталей, из которых состоит система.
малые температурные деформации.
§ Материалы и конструктивные формы несущей системы
1. СТАНИНЫ.
Несут на себе подвижные и неподвижные узлы станка. В зависимости от расположения оси станка делятся на горизонтальные и вертикальные.

Сечения горизонтальных станин.
Расчетная схема станины токарного станка.
Рассчитывается прогиб f в середине пролета двухопорной балки.
![]() ,
где
,
где
Р – поперечная сила в середине пролета;
(ЕJ)пр – приведенная жесткость балки на изгиб.

Расчетная схема сверлильного станка.
Прогиб
свободного конца балки с заделанным
концом:
![]()
§ Жесткость стыков базовых деталей
Влияет на точность обработки, т.к. деформации в стыках составляют от 30 до 70 % всех упругих перемещений несущей системы станка.
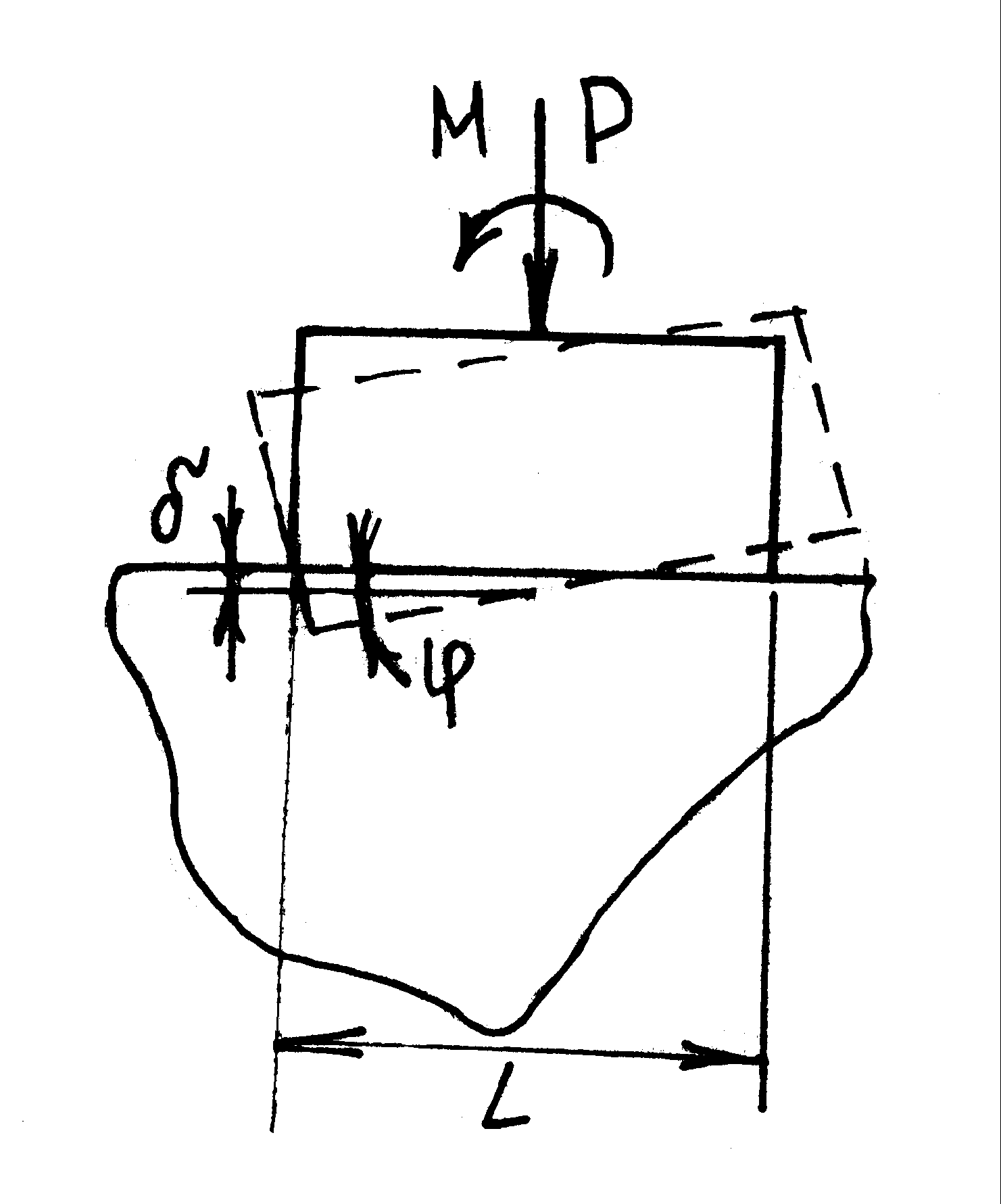
Линейная деформация δ и поворот в плоском стыке при нагружении центральной силой Р и моментом М определяется:
![]() ;
;
![]() ,
где
,
где
С и Сm – коэффициенты контактной податливости.
Для деталей из стали и чугуна:
при чистовой обработке (точное точение, шлифование) С = 0,15÷0,2;
при притирке С = 0,07;
при грубой обработке (фрезеровании) С = 0,8÷1,2.
![]() ,
где
,
где
S, J – площадь и момент инерции сечения контакта;
m – показатель степени, m = 0,5 – для чистовых методов обработки поверхностей.
Точность приближенных расчетов оценивается сравнением результатов расчетов и экспериментов на реальных станках при статическом нагружении, соответствующем нагружению резанием.
Во многих случаях когда базовые детали из-за сложности формы не поддаются расчету, проводят исследование жесткости на моделях.
Материалы для моделей – оргстекло и конструкционная сталь (для сварных моделей).