

Лекция № 13
Тема:
Выбор переменных состояния дискретной системы.
План лекции:
1. Способ прямого программирования.
2. Способ параллельного программирования.
3. Способ последовательного программирования.
1. Способ прямого программирования.
Рассмотрим переход от описания импульсной системы с помощью Z-передаточных функций к описанию с помощью переменных состояния. Как уже отмечалось, выбор переменных состояния не является единственным, и определяется выбором соответствующего базиса. Практически удобным приемом выбора переменных состояния является составление схем моделирования дискретных систем. Схемы включают в себя элементы задержки на такт и сумматоры. Пpи выбope пepeмeнныx cocтoяния импульсных систем за них удобно принимать выходы элементов задержки на такт.
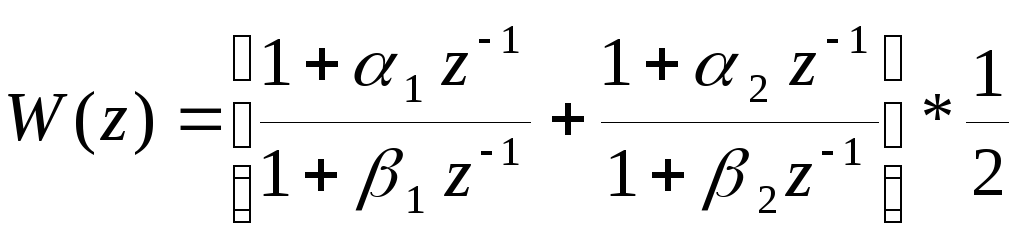
Рассмотрим три способа перехода от Z-передаточной функции дискретной системы к уравнениям (57), (58): способы прямого программирования, последовательного программирования и параллельного программирования на примере звена второго порядка с одним входом и одним выходом и передаточной функцией
![]()
При способе прямого программирования,
разделив числитель и знаменатель
передаточной функции на
![]() (в общем случае на
(в общем случае на![]() ),
получим
),
получим
![]() (60)
(60)
По определению передаточной функции
![]()
Введем новую переменную e[kT], Z-преобразование которой имеет вид
![]() .
.
Тогда
![]()
или
![]()
В соответствии с выражением (60) составляем
схему моделирования (рис.35). При этом
учитываем, что множитель
![]() соответствует задержке переменной на
один такт квантования.
соответствует задержке переменной на
один такт квантования.
Р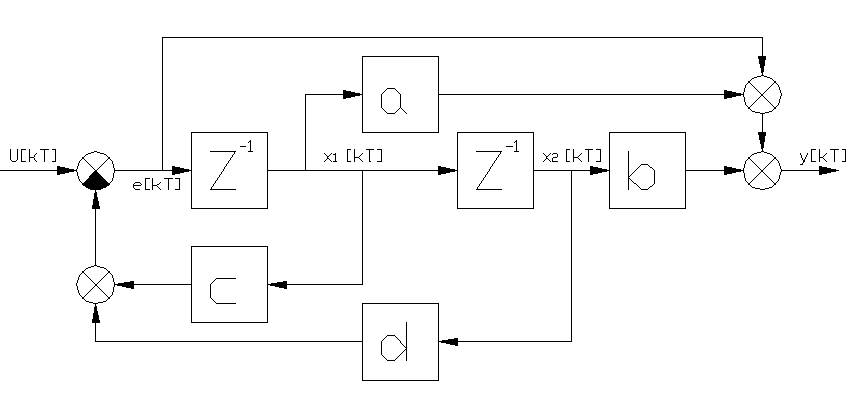 ис.
35
ис.
35
Уравнения состояния системы можно получить, записывая соотношения, связывающие координаты на выходах элементов задержки. В итоге имеем
![]()
![]() .
(61)
.
(61)
Так как
![]()
и при этом
![]() ,
,
то для выходной переменной y[kT] получим уравнение
![]() (62)
(62)
Таким образом, уравнения (57), (58) принимают вид (61). (62), а матрицы Ф, Н, C, D определяются выражениями
 .
.
Запись системы уравнений (61) для общего случая не представляет сложности. При этом матрица Ф будет иметь структуру, аналогичную собственной матрице системы дифференциальных уравнений, записанных в первой нормальной форме Коши.
2. Способ параллельного программирования.
Рассмотрим способ параллельного программирования. Передаточная функция системы, приведенная к виду (60), разбивается на сумму элементарных звеньев.
Изображение переменных состояния определяется выражениями
![]()
Соответствующая схема моделирования представлена на рис.36.
Р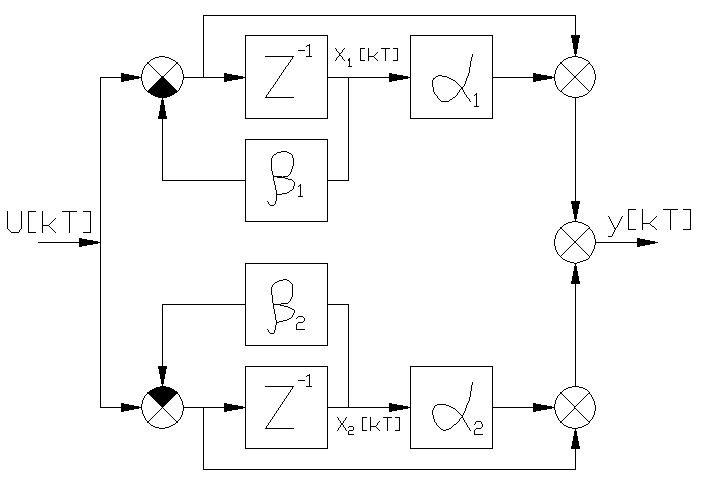 ис.36
ис.36
Разностные уравнения системы имеют вид
![]()
![]()
Прежде чем записать уравнение для выходной переменной системы, наполним некоторые преобразования передаточной функции

Переходя от изображений к оригиналам, получим
![]()
При таком выборе переменных состояния матрицы Ф, Н, С, Dсоответственно имеют вид

Преимущество этого подхода состоит в
том, что собственная матрица дискретной
системы Ф оказывается .диагональной,
но при этом числа
![]() (корни характеристического уравнения
системы) могут оказаться комплексными.
Такие же уравнения можно получить, если
передаточную функцию
(корни характеристического уравнения
системы) могут оказаться комплексными.
Такие же уравнения можно получить, если
передаточную функцию![]() непосредственно разложить на простейшие
дроби и каждой дроби поставить в
соответствие переменную состояния.
непосредственно разложить на простейшие
дроби и каждой дроби поставить в
соответствие переменную состояния.