

6. Операции в криволинейных координатах
6.1. Криволинейные ортогональные координаты. В декартовой системе координат положение в пространстве некоторой точки М(х', у', z') определяется пересечением трёх взаимно перпендикулярных координатных плоскостей (рис. 6.1)
х = х', у = у', z=z'.
Через точку М, таким образом,, проходят
три прямые, каждаяиз
которых принадлежит двум координатным
плоскостям. Они называются
координатными
прямыми; положение
точки на каждой
из них зависит от одной координаты х,
у или z.
Произвольно
перемещая точку М
в пространстве,
можно построитьсколько угодно
координатных плоскостей и соответствующих
координатных прямых. Изменению положения
точкиМ соответствует изменение
направленного
отрезка
 ,
соединяющего
её с началом координат О, т. е.
радиус-вектора (I.1.3).
,
соединяющего
её с началом координат О, т. е.
радиус-вектора (I.1.3).
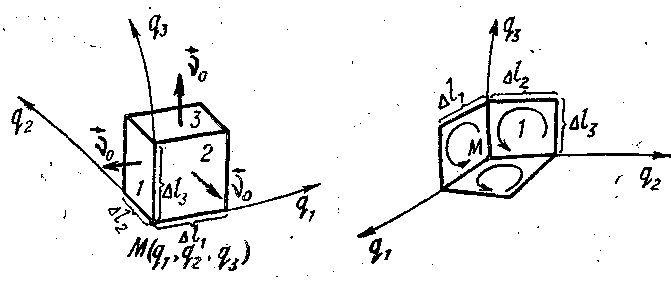
Понятно, что точка в пространстве может быть с тем же успехом определена как пересечение трех произвольных однозначно заданных поверхностей. Так, в цилиндрической системе координат фиксируется пересечение поверхности кругового цилиндра и двух плоскостей, одна из которых проходит через его ось, а другая ей перпендикулярна. В сферической системе пересекаются полуплоскость, поверхность конуса и поверхность сферы. Мы пришли, таким образом, к понятию координатных поверхностей. Последние в общем случае можно описать уравнениями
q1(x, у, z) = const, q2(x, у, z) = const и q3(x, у, z) = const, (6.1)
где в левых частях равенств стоят некоторые однозначные функции декартовых координат.
На линии пересечения двух координатных поверхностей выполняются одновременно два равенства из (6.1), а следовательно, её точки определяются только одной из функцийq1, q2, q3. Поэтому каждая такая линия называетсякоординатной, а эти функции - криволинейными координатами.
Для произвольной точки М в системе криволинейных координат устанавливается обозначение М (q1, q2, q3).
В каждой точке можно
рассматривать единичные векторы (орты),
касательные координатным линиям и
направленные в сторону
возрастания соответствующих координат;
они будут обозначены символами
 .
.
В дальнейшем мы будем использовать только ортогональные системы координат, т. е. такие, орты которых в любой точке взаимно перпендикулярны:
 (6.2)
(6.2)
Перемещение точкиМ выражается
приращением её радиус-вектора .
Разлагая дифференциал
.
Разлагая дифференциал noopтам
noopтам ,
имеем:
,
имеем:
 , (6.3)
, (6.3)
где dl1, dl2 и dl3 - дифференциалы длины по соответствующим криволинейным координатам.
С другой стороны,
 . (6.4)
. (6.4)
Причём частные производные радиус-вектора по координатам - это векторы, параллельные их ортам:
 . (6.5)
. (6.5)
Сопоставляя равенства (6.3) и (6.4) с учётом (6.5), видим, что дифференциалы длины криволинейных координат отличаются от дифференциалов самих координат множителями h1, h2 и h3:
 . (6.6)
. (6.6)
Множители эти называются метрическими коэффициентами, или коэффициентами Ламэ. Вообще метрические коэффициенты являются функциями координат. В тех случаях, когда приращения длины и приращения соответствующих координат идентичны, эти коэффициенты равны единице.
Заметим, что если в криволинейных координатах рассматривается поле вектора

то дифференциал длины силовой линии выражается в отличие от (2.6) по формуле (6.3) и, соответственно, вместо пропорции (2.7) получается:
 (6.7)
(6.7)
или подставляя (6.6):
 (6.8)
(6.8)
6.2. Цилиндрические и сферические координаты. Из всех ортогональных криволинейных систем координат чаще всего иcпользуют цилиндрическую и сферическую, которые мы уже упоминали. Цилиндрические координаты r, φ, z (см. рис. 6.2) - это расстояние точки наблюдения от оси цилиндра (z), угол ориентации проходящей через эту точку и ось плоскости по отношению к некоторой фиксированной плоскости (x0z) и расстояние точки от горизонтальной плоскости(х0у). Заметим,что радиальное направление здесь не совпадает с радиус-вектором. Сферические координаты r, θ, φ (см. рис. 6.3) имеют соответственно следующий смысл: расстояние от начала координат (0), угол ориентации радиального направления по отношению к некоторой оси (z) и угол ориентации плоскости, проходящей через ось и точку наблюдения, по отношению к фиксированной плоскости (x0z).
Основные характеристики цилиндрической и сферической систем сведены в следующую таблицу 6.1.
Орты здесь обозначены теми же буквами, что и соответствующие координаты, и порядок перечисления координат выбран таким, что орты образуют правую тройку векторов; орты угловых координат направлены в сторону возрастания соответствующих углов (рис. 6.6 а, б).
Метрические коэффициенты легко находятся из геометрических соображений (рис. 6.6а, б). Как видно, отвечающие угловым координатам qi коэффициенты hi - это просто радиусы окружностей, дугами которых являются элементы длиныdli.
Таблица 6.1
|
Номер координаты, i |
Система координат коорди* ат | ||||||||
|
Цилиндрическая ическая |
Сферическая | ||||||||
|
qi |
|
hi |
dli |
qi |
|
hi |
dli | ||
|
1 |
r |
|
1 |
dr |
r |
|
1 |
dr | |
|
2 |
α |
|
r |
rdα |
θ |
|
r |
rdθ | |
|
3 |
z |
|
1 |
dz |
α |
|
rsinθ |
rsinθdα | |








Элемент объема ΔV = Δl1Δl2Δl3 в цилиндрических координатах есть rΔrΔφΔz, а в сферических r2sinθΔrΔθΔφ. Элемент поверхности координатного цилиндра есть rΔφΔz, а координатной сферыr2sinθΔθΔφ.
6.3. Операции векторного анализа в криволинейных ортогональных координатах. На основании общих определений операций векторного анализа нетрудно построить их выражения'в произвольных криволинейных ортогональных координатах.
Градиент.
Согласно (2.4) проекции вектора
 на
осикриволинейных
координат q1,
q2
и q3
(т. е. на
направления касательных, задаваемые
ортами
на
осикриволинейных
координат q1,
q2
и q3
(т. е. на
направления касательных, задаваемые
ортами имеют вид:
имеют вид:

Но ввиду (6.6)
 и
т. д.
и
т. д.
Поэтому

Дивергенция.
Вычислим
 в криволинейных
координатах подобно тому, как это
делалось ранее (п 3.3) в декартовых.
Элементарный параллелепипед изображен
на рис. 6.7 (ср. рис. 3.5); объём его равен
в криволинейных
координатах подобно тому, как это
делалось ранее (п 3.3) в декартовых.
Элементарный параллелепипед изображен
на рис. 6.7 (ср. рис. 3.5); объём его равен

Поток вектора
 через грань1 и противоположную
ей грань1' вычисляется, как и в п. 3:
через грань1 и противоположную
ей грань1' вычисляется, как и в п. 3:

q1, q2, q3 q1+Δq1, q2, q3
 i
Рис.
6.7 Рис. 6.8
i
Рис.
6.7 Рис. 6.8
(теперь существенно, что не только вектор, но и метрические коэффициенты - функции координат). Аналогичные выражения для потокаФ2 (грани 2 и 2') и потока Ф3(грани 3 и 3') имеют вид:

А поскольку

получаем следующее
выражение расхождения в криволинейных
координатах:
(6.10)
Ротор. Вычисляя в криволинейных координатах rot F, построим рис. 6.8, подобный рис. 4.1. Действуя так же, как и в § 4, п. 2, имеем:

Следовательно,
 (6.11a)
(6.11a)
Запишем аналогичные выражения:
 (6.11б)
(6.11б)
и
 (6.11в)
(6.11в)
Таким образом, имеем:

Оператор Лапласа. Формулы (6.10) и (6.9) позволяют записать в криволинейных координатах оператор Лапласа, действующий на скалярную функцию ψ:

Внося в (6.10)

и т. д., получаем:
 (6.13)
(6.13)
При вычислении
 (действие
на векторную функцию
(действие
на векторную функцию )
исходят из выражения (5.12):
)
исходят из выражения (5.12):
 .
.
Действия в правой части производятся на основании полученных выше выражений (6.9), (6.10), (6.12).
6.4. Операции векторного анализа в цилиндрических и сферических координатах. На основании формул (6.9), (6.10), (6.12) и (6.13) и табл. 6.1 имеем: