

МОЙ ДИПЛОМ_1 / 14 Приложение А
.docПриложение А
Ввод эмпирических данных изменения концентрации хлора во времени на выходе из установки ультрафильтрации:
(0.57; 0.54; 0.54; 0.57; 0.57; 0.54; 0.58; 0.54; 0.54; 0.58;0.59; 0.59; 0.71; 0.71; 1.21; 1.22; 1.64; 1.64; 1.22; 0.8; 0.71; 0.63; 0.58; 0.58; 0.58; 0.59; 0.59; 0.56; 0.56; 0.6; 0.63; 0.57; 0.57; 0.72; 0.56; 0.56; 0.77; 1.03; 0.66; 0.58; 0.58; 0.8; 0.8; 0.6; 0.57; 0.57; 0.72; 0.72; 0.59; 0.8; 0.58; 0.72; 0.65; 0.89; 0.7; 0.91; 0.71; 0.81; 0.72; 0.8; 0.71; 0.79; 0.9; 0.7; 0.7; 0.8; 0.71; 0.75; 0.72; 0.78; 0.72; 0.77; 0.7; 0.78; 0.71; 0.78; 0.72; 0.81; 0.8; 0.71; 0.79; 0.72; 0.8; 0.73; 0.73; 0.78; 0.78; 0.77; 0.73; 0.79; 0.75; 0.80; 0.75; 0.8; 0.75; 0.81; 0.8; 0.77; 0.76; 0.77)
Ввод эмпирических данных изменения положения клапана во времени:
(0,192; 0,182; 0,182; 0,192; 0,192; 0,182; 0,196; 0,182; 0,182; 0,196; 0,199; 0,199;
0,24; 0,24; 0,408; 0,412; 0,554; 0,412; 0,27; 0,24; 0,196; 0,196; 0,196; 0,199; 0,199;
0,189; 0,189; 0,203; 0,213; 0,192; 0,192; 0,243; 0,189; 0,189; 0,26; 0,348; 0,223;
0,196; 0,196; 0,27; 0,27; 0,203; 0,92; 0,192; 0,243; 0,243; 0,199; 0,27; 0,196; 0,243;
0,219; 0,236; 0,307; 0,24; 0,273; 0,243; 0,27; 0,24; 0,267; 0,304; 0,236; 0,236; 0,27;
0,24; 0,253; 0,243; 0,263; 0,243; 0,26; 0,236; 0,24; 0,263; 0,243; 0,273; 0,27; 0,24;
0,243; 0,27; 0,246; 0,246; 0,263; 0,263; 0,246; 0,267; 0,253; 0,27; 0,253; 0,27;
0,253; 0273; 0,27; 0,26; 0,257; 0,26)
Ввод эмпирических данных временной оси:
(0 420 460 480 540 600 720 780 1.25*10^3 1.26*10^3
1.32*10^3 1.36*10^3 1.38*10^3 1.44*10^3 1.5*10^3 1.53*10^3 1.54*10^3 1.56*10^3 1.62*10^3 1.68*10^3 1.74*10^3 1.86*10^3 1.88*10^3 2.1*10^3 2.16*10^3 2.22*10^3 2.28*10^3 2.4*10^3 2.46*10^3 2.48*10^3 2.52*10^3 2.64*10^3 3.54*10^3 4.26*10^3 4.44*10^3 5.04*10^3 5.28*10^3 5.34*10^3 5.58*10^3 6.42*10^3 6.84*10^3 7.02*10^3 7.26*10^3 7.28*10^3 7.56*10^3 7.68*10^3 7.74*10^3 7.98*10^3 8.64*10^3 8.7*10^3 8.94*10^3 9.06*10^3 9.6*10^3 9.78*10^3 9.9*10^3 1.02*10^4 1.032*10^4 1.05*10^4
1.062*10^4 1.08*10^4 1.092*10^4 1.104*10^4 1.116*10^4 1.128*10^4 1.164*10^4 1.176*10^4 1.194*10^4 1.206*10^4 1.218*10^4 1.23*10^4 1.236*10^4 1.254*10^4 1.266*10^4 1.284*10^4 1.29*10^4 1.302*10^4 1.314*10^4 1.326*10^4 1.338*10^4 1.356*10^4 1.374*10^4 1.392*10^4 1.41*10^4 1.446*10^4 1.452*10^4 1.47*10^4 1.482*10^4 1.506*10^4 1.518*10^4 1.524*10^4 1.53*10^4 1.536*10^4 1.542*10^4 1.566*10^4 1.584*10^4 1.596*10^4 1.632*10^4 1.644*10^4 1.65*10^4 1.656*10^4)
Интерполяция измеренных сигналов положения клапана во времени:
![]()
![]()
![]()
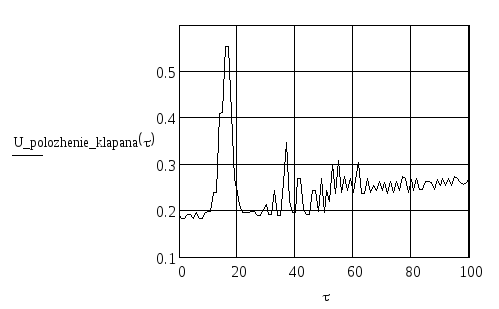
Рисунок 1 – изменение положения клапана во времени
Начальные условия для построения на графике изменения концентрации хлора на выходе установки ультрафильтрации:
![]()
![]()
![]()
![]()
![]()
![]()
![]()

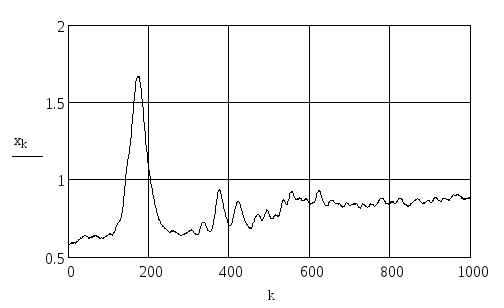
Рисунок 2 – изменение концентрации хлора на выходе из УУФ
Ввод начальных данных для нахождения коэффициентов методом наименьших квадратов:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Метод наименьших квадратов в матричной форме:
![]()
Коэффициенты найденные методом наименьших квадратов:
Уравнение по которому строится график предварительно обученной модели:
![]()
![]()

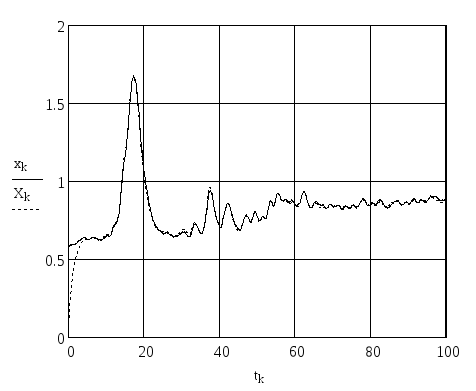
Рисунок 3 – сплошная линия – реальный выходной сигнал изменения концентрации хлора на выходе УУФ и пунктирная линия – сигнал предварительно обученной модели УУФ.
Находим погрешность измерения предварительно обученной модели:
![]()
Далее строим общий график погрешности на всем интервале времени
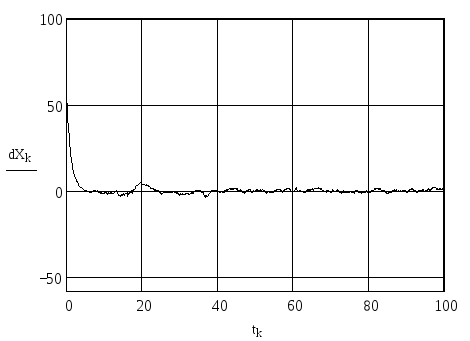
Рисунок 4 – относительная погрешность предварительно обученной модели
Изменяя пределы значений по оси Y делая их намного меньше от -3,5 до +5,5 на том же интервале времени показываем ту же погрешность в установившемся режиме более наглядно
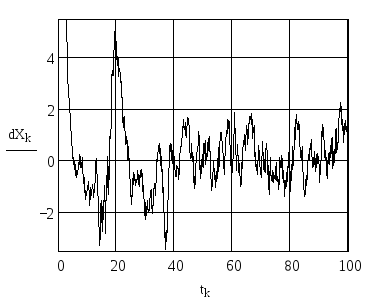
Рисунок 5 – относительная погрешность в установившемся режиме
Задаем начальные условия для реализации рекуррентного методе наименьших квадратов (алгоритм Калмана):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Задаемся вспомогательными матрицами V, A, R:

Находим вспомогательную матрицу V:
![]()
Записываем рекуррентный метод наименьших квадратов в матричной форме (алгоритм Калмана):

После чего на плоскости координат строим два графика предварительно обученную модель и обученную модель в контуре управления
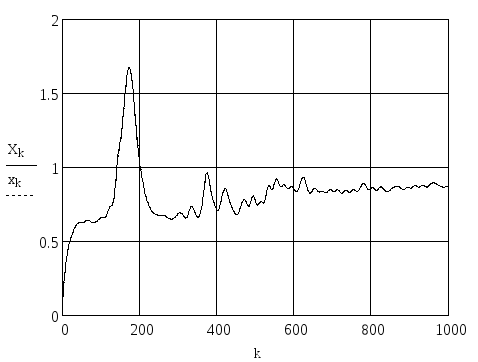
Рисунок 6 – предварительно обученная модель ХК УУФ и обученная в контуре управления хК
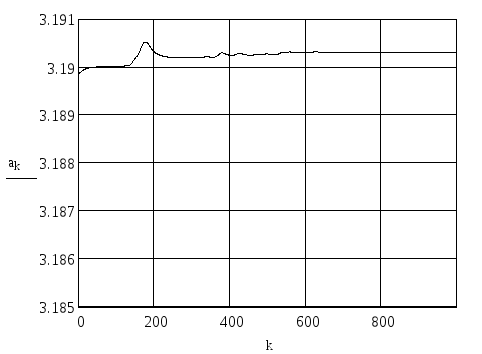
Рисунок 7 – оценка параметра модели «аК» в процессе обучения
Рассчитываем абсолютную погрешность обученной модели в контуре управления:
![]()
Минимальная погрешность составляет:
![]()
Максимальная погрешность составляет:
![]()
Рисунок 8 – абсолютная погрешность обученной модели в контуре управления
Рассчитываем относительную погрешность обученной модели в контуре управления:
![]()
.
Минимальная погрешность составляет:
![]()
Максимальная погрешность составляет:
![]()
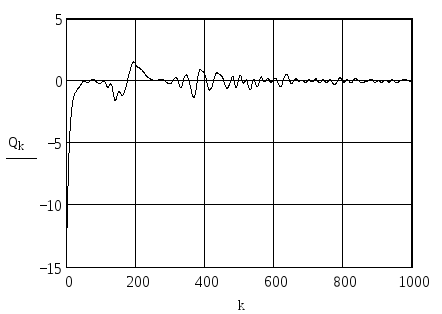
Рисунок 9 – относительная погрешность обученной модели в контуре управления
Изменяя пределы значений по оси Y делая их намного меньше от -1 до +1,5 на том же интервале времени показываем ту же погрешность в установившемся режиме более наглядно
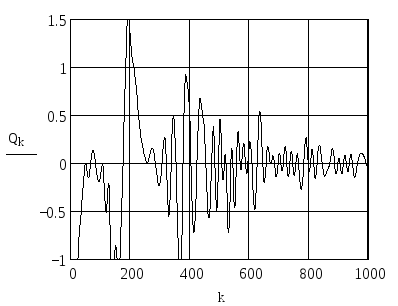
Рисунок 10 – относительная погрешность обученной модели в контуре управления в установившемся режиме
Далее рассчитываем среднее квадратичиское отклонение погрешности управления существующей САУ:
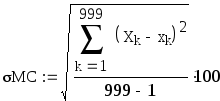
![]()
Далее рассчитываем среднее квадратичиское отклонение погрешности адаптивной САУ:
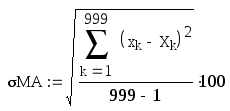
![]()
Засчитываем среднее значение требуемого реагента в литрах (бисульфит натрия)
Na2SO3 :
![]() .
.