

Выбор ширины конуса сопровождения
На
рис. 34,а цель находится внутри конуса
сопровождена и отклонена от РСН вправо
на угол .
Максимальная величина сигнала принимается
в момент 1, минимальная - в момент 3.
Сечения диаграммы плоскостью, проходящей
через ось РСН и ось
в моменты 1 и 3, показаны на рис. 34,б
в декартовой системе координат. 
 Величина
сигнала ошибки2U.
(рис. 34 в,г)
может быть найдена по характеристике
углового различителя (пеленгационной
характеристике), полученной вычитанием
сечений 1 и 3. Участок АВ
разностной кривой определяет
чувствительность системы к ошибкам
сопровождения. Чувствительность тем
лучше, чем выше крутизна этого участка.
При малых углах конуса
кривые
пересекаются в окрестностях максимумов,
где крутизна мала, поэтому мала крутизна
характеристики углового различителя
(рис. 35,б). С увеличением угла
крутизна характеристики углового
различителя увеличивается (рис. 35.б).
Однако слишком большой ширину конуса
сканирования выбирать нельзя. При
больших углах
уменьшается
уровень сигнала от цели, находящейся
вблизи РСН. Точка А (рис.35,б) является
важнейшей на характеристике, так как в
режиме слежения цель удерживается
вблизи её. При этом при увеличении угла
в
значительной
степени уменьшается отношение сигнала
ошибки к величине флюктуации на выходе
детектора приёмника (детектор является
нелинейным элементом).
Величина
сигнала ошибки2U.
(рис. 34 в,г)
может быть найдена по характеристике
углового различителя (пеленгационной
характеристике), полученной вычитанием
сечений 1 и 3. Участок АВ
разностной кривой определяет
чувствительность системы к ошибкам
сопровождения. Чувствительность тем
лучше, чем выше крутизна этого участка.
При малых углах конуса
кривые
пересекаются в окрестностях максимумов,
где крутизна мала, поэтому мала крутизна
характеристики углового различителя
(рис. 35,б). С увеличением угла
крутизна характеристики углового
различителя увеличивается (рис. 35.б).
Однако слишком большой ширину конуса
сканирования выбирать нельзя. При
больших углах
уменьшается
уровень сигнала от цели, находящейся
вблизи РСН. Точка А (рис.35,б) является
важнейшей на характеристике, так как в
режиме слежения цель удерживается
вблизи её. При этом при увеличении угла
в
значительной
степени уменьшается отношение сигнала
ошибки к величине флюктуации на выходе
детектора приёмника (детектор является
нелинейным элементом).
 Обычно
ширину конуса сканирования выбирают
примерно равной ширине диаграммы
направленности 2.
Обычно
ширину конуса сканирования выбирают
примерно равной ширине диаграммы
направленности 2.
Частота сканирования луча
Частота равна числу оборотов луча (по конусу) за одну секунду. Максимально возможное её значение ограничивается частотой повторения импульсов радиолокатора. Для качественного выделения огибающей сигнала ошибки необходимо, чтобы период сканирования примерно в десять раз превышал период повторения РЛС (Тск>10Т).
Выбор
низких частот сканирования нежелателен,
так как система становится более
инерционной, возрастают динамические
ошибки. Возрастают также и флюктуационные
ошибки из-за увеличения влияния флюктуаций
амплитуды отражённого сигнала.
Поясним
это со спектральных позиций. Каналы
выделения составляющих сигнала ошибки
по азимуту и наклону включают операции
умножения на опорные напряжения частоты
сканирования cost
и sint
и фильтрацию на видеочастоте (рис. 36).
Совокупность этих двух операций
эквивалентна фильтрации на частоте
сканирования. Пусть для цели, находящейся
на РСН, энергетический спектр флюктуаций
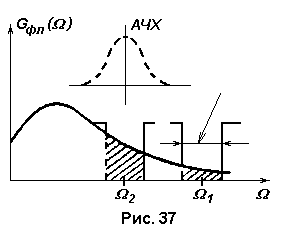 огибающей
импульсов описывается функциейGфл()
(рис. 37).
Амплитудно-частотная характеристика
каналов выделения составляющих сигнала
ошибки показана пунктиром. На рисунке
заштрихована часть спектральной
плотности флюктуации амплитуд, попадающая
в полосу следящей системы. С понижением
частоты сканирования (2<1)
эта часть будет возрастать, что приведёт
к увеличению флюктуационной ошибки.
огибающей
импульсов описывается функциейGфл()
(рис. 37).
Амплитудно-частотная характеристика
каналов выделения составляющих сигнала
ошибки показана пунктиром. На рисунке
заштрихована часть спектральной
плотности флюктуации амплитуд, попадающая
в полосу следящей системы. С понижением
частоты сканирования (2<1)
эта часть будет возрастать, что приведёт
к увеличению флюктуационной ошибки.
Автоматическая регулировка усиления
АРУ поддерживает постоянство среднего уровня амплитуды сигнала на выходе приёмника, т.е. осуществляет нормировку среднего уровня сигнала, предотвращая перегрузку приёмника. Коэффициент усиления УПЧ обратно пропорционален средней величине амплитуды сигнала на входе приёмника - Āfp
![]() ,
(46)
,
(46)
Ā - среднее значение амплитуды сигнала;
fp - коэффициент передачи антенны на РСН
Ū0 - среднее значение амплитуды напряжения на выходе УПЧ.
Используя (39), можно записать огибающую напряжения на выходе УПЧ
![]() .
(47)
.
(47)
Величина
![]() называется
коэффициентом пеленгационной
чувстви-тельности.
называется
коэффициентом пеленгационной
чувстви-тельности.
Стабилизация напряжений на выходе приёмника с помощью системы АРУ обеспечивает устойчивость всей следящей системы. Динамический диапазон АРУ должен быть большим (80-90 дБ), что обусловлено изменением дальности до целей и различием их ЭПР. Постоянная времени АРУ должна быть такой, чтобы не было демодуляции сигнала ошибки.