

1.5. Одноканальные методы автосопровождения
В режиме обзора системы часто не обеспечивают необходимой точности измерения угловых координат. Причиной является низкий темп поступления информации. Для точного измерения угловых координат необходимо непрерывное поступление информации о координатах объектов, что потребовало создания специальных РЛС сопровождения со следящей антенной. Задачей автоматического сопровождения объекта является непрерывное совмещение оси антенны с направлением на объект и передача угловых координат оси антенны в виде напряжений или углов поворота, пропорциональных азимуту и углу места в вычислительное устройство.
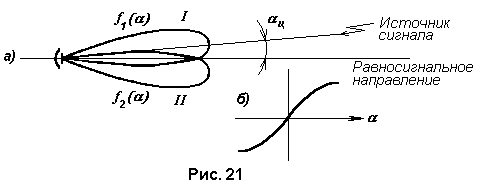
Наиболее просто пояснить принцип действия одноканальной системы сопровождения на примере системы с переключением луча. Луч скачком занимает положение I или II (рис. 21 а). Когда излучающий источник расположен на равносигнальном направлении (РСН), принятые сигналы оказываются равными по амплитуде. При смещении источника излучения в одну сторону от этого направления, например, вверх, сигнал, принимаемый по лучу I, будет больше, чем по лучу II. При смещении вниз, наоборот - по лучу II больше, чем по лучу I. Таким образом сравнение амплитуд указывает величину углового смещения от РСН и, что самое важное для систем сопровождения, направление этого смещения. Переключение луча позволяет определить направление отклонения источника излучения от РСН теоретически по каждой паре импульсов. Пеленгационная характеристика системы с переключением луча представлена на рис.21,б. Она определяется как разность первого и второго лучей. Однако, несмотря на простоту метода, в связи с необходимостью быстрого переключения антенного луча, возникает множество технических проблем. Кроме того, метод переключения луча в простейшей форме обеспечивает определение направления источника излучения от РСН только в одной плоскости. Определение направлений в двух плоскостях связано с переключением луча в двух взаимно перпендикулярных плоскостях.
Технически наиболее просто направление отклонения цели от РСН в двух плоскостях определяется при использовании метода конического сканирования.
Рассмотрим автоматическое сопровождение цели радиолокатором. Диаграмма направленности быстро вращается вокруг оси 001 (рис. 22,а). Максимум диаграммы отклонён от оси вращения на угол , поэтому он вращается по окружности 1-2-3-4. Ось диаграммы описывает коническую поверхность. С помощью моторов азимута и угла места (наклона) ось 001 вместе с конусом изменяет угловое положение, осуществляя медленный поиск цели. Когда цель попадает внутрь конуса, начинется автоматическое сопровождение. Сигналы, отраженные от цели, находящейся в точке А внутри конуса сопровождения, оказываются модулированными по амплитуде. В момент, когда ось антенны занимает положение 2 (рис.22), сигнал от цели А(2) - максимален, в момент 4 - сигнал А(4) - минимален. Амплитуда сигналов определяется длиной векторов. Модулированные по амплитуде импульсы с выхода детектора показаны на рис. 22,б. Период модуляции Тск определяется интервалом времени, втечение которого антенна совершит один оборот по окружности 1,2,3,4. Глубина модуляции пропорциональна величине отклонения цели от оси вращения антенны. Модулирующая кривая показана отдельно на рис.22,в. При небольших отклонениях цели относительно оси (<) модулирующая кривая близка к синусоиде. Её называют сигналом ошибки, так как содержащаяся в амплитуде и фазе информация позволяет доворачивать ось антенны (ось конуса сопровождения) так, чтобы свести эту ошибку к нулю, то есть совместить ось антенны с направлением на цель.

Р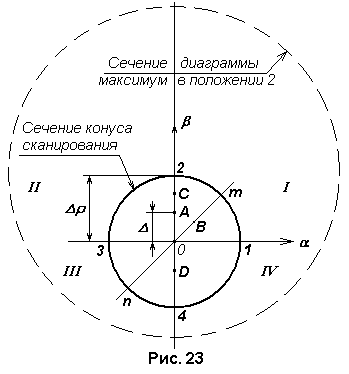 ассмотрим
образование сигнала ошибки подробнее.
На рис.23 показано сечение конуса
сопровождения плоскостью, совпадающей
с системой координат (,)
(окружность 1,2,3,4). Максимум диаграммы
совершает быстрое вращение по окружности,
проходя через направления точек 1,2,3,4.
Пунктиром на рисунке показано сечение
диаграммы для случая, когда её ось
совпадает с направлением 2. Если на этом
направлении находится цель, то принимаемый
от неё сигнал будет максимально возможным.
Для любого другого положения цели внутри
конуса (круга) при данном положении
диаграммы принимаемый сигнал будет
меньше. Точнее, величина сигнала будет
тем меньше, чем больше будет расстояние
от точки, определяющей положение
максимума диаграммы в данный момент
(точка 2), до точки, определяющей направление
цели. Например, для цели В сигнал будет
меньше, чем для цели А, так как расстояние
от точки 2 до В будет больше, чем от 2 до
А. Очевидно, минимально возможный сигнал
для указанного положения максимума
диаграммы (точка 2) будет приниматься
от цели, расположенной в точке 4 -
противоположная точка на круге 1,2,3,4.
ассмотрим
образование сигнала ошибки подробнее.
На рис.23 показано сечение конуса
сопровождения плоскостью, совпадающей
с системой координат (,)
(окружность 1,2,3,4). Максимум диаграммы
совершает быстрое вращение по окружности,
проходя через направления точек 1,2,3,4.
Пунктиром на рисунке показано сечение
диаграммы для случая, когда её ось
совпадает с направлением 2. Если на этом
направлении находится цель, то принимаемый
от неё сигнал будет максимально возможным.
Для любого другого положения цели внутри
конуса (круга) при данном положении
диаграммы принимаемый сигнал будет
меньше. Точнее, величина сигнала будет
тем меньше, чем больше будет расстояние
от точки, определяющей положение
максимума диаграммы в данный момент
(точка 2), до точки, определяющей направление
цели. Например, для цели В сигнал будет
меньше, чем для цели А, так как расстояние
от точки 2 до В будет больше, чем от 2 до
А. Очевидно, минимально возможный сигнал
для указанного положения максимума
диаграммы (точка 2) будет приниматься
от цели, расположенной в точке 4 -
противоположная точка на круге 1,2,3,4.
Рассмотрим теперь изменение величины сигнала в процессе движения антенны по кругу. Пусть цель находится в точке 0 - на оси вращения антенны. Рассогласование > 0. Тогда максимум диаграммы, вращаясь по кругу 1,2,3,4, всё время оказывается равноудалённым от цели и амплитуда принимаемых сигналов в любой момент времени (1,2,3,4 и т.д.) одинакова (рис. 24,а). Модуляция отражённых сигналов отсутствует потому, что отсутствует сама ошибка, так как ось вращения точно направлена на цель Uсо= 0 (рис.24,б).
 Пусть
цель находится теперь в точке А
(рис. 23). Рассогласование ее относительно
оси вращения 0.
Максимум диаграммы, двигаясь по кругу
(1,2,3,4) подходит к цели А
наиболее близко в момент 2, а в момент 4
находится на максимальном удалении.
Минимальный и максимальный углы удаления
соответственно равны (-)
и (+).
Рис. 25,а показывает поведение амплитуды
принимаемого сигнала и сигнала ошибки
(цель в точке А).
Если бы цель сдвинулась вверх ещё больше
(точка С),
то глубина модуляции импульсов возросла
бы, так как в момент 2 максимум сближается
с целью еще теснее, а в момент 4 удалялся
бы от неё ещё больше. Моменты максимумов
(2) и минимумов (4) огибающей дпя целей А
и С
совпадают (рис. 25, б пунктир). Факт этого
совпадения очень важен и является
следствием того, что обе цели находятся
на прямой линии (2-0-4) (рис.23), отклонены
строго вверх. Очевидно, если цель
по-прежнему находится на линии (2-0-4), но
отклонена вниз (точка D),
то положение максимумов и минимумов
поменяется местами.
Пусть
цель находится теперь в точке А
(рис. 23). Рассогласование ее относительно
оси вращения 0.
Максимум диаграммы, двигаясь по кругу
(1,2,3,4) подходит к цели А
наиболее близко в момент 2, а в момент 4
находится на максимальном удалении.
Минимальный и максимальный углы удаления
соответственно равны (-)
и (+).
Рис. 25,а показывает поведение амплитуды
принимаемого сигнала и сигнала ошибки
(цель в точке А).
Если бы цель сдвинулась вверх ещё больше
(точка С),
то глубина модуляции импульсов возросла
бы, так как в момент 2 максимум сближается
с целью еще теснее, а в момент 4 удалялся
бы от неё ещё больше. Моменты максимумов
(2) и минимумов (4) огибающей дпя целей А
и С
совпадают (рис. 25, б пунктир). Факт этого
совпадения очень важен и является
следствием того, что обе цели находятся
на прямой линии (2-0-4) (рис.23), отклонены
строго вверх. Очевидно, если цель
по-прежнему находится на линии (2-0-4), но
отклонена вниз (точка D),
то положение максимумов и минимумов
поменяется местами.
 Для
цели В, смещённой вверх-вправо (рис. 23),
моменты максимума огибающей (m)
и минимума (n)
будут определяться, как точки пересечения
круга (1-2-3-4) с прямой линией, проходящей
через ось вращения (точку 0)
и точку В.
Для
цели В, смещённой вверх-вправо (рис. 23),
моменты максимума огибающей (m)
и минимума (n)
будут определяться, как точки пересечения
круга (1-2-3-4) с прямой линией, проходящей
через ось вращения (точку 0)
и точку В.
|
|
Из рис. 23 видно, что момент m находится на круге между моментами 1 и 2 примерно посередине, поэтому на временной диаграмме (рис. 26) соответствующий момент максимума огибающей (m) будет наблюдаться на середине участка (1-2). Анализ огибающей при других расположениях цели внутри круга (1,2,3,4) позволяет сделать вывод о том, что если цель находится в первой четверти круга (I) (рис. 23), то максимум огибающей будет на временной оси между точками 1-2, если во второй четверти (II) - между точками 2-3 и т.д. |

Таким образом существует однозначная связь между положениями максимумов (минимумов) огибающей на временной оси по отношению к опорным точкам 1,2,3,4 и направлением рассогласования цели на плоскости ,.
При небольших угловых отклонениях цели от РСН огибающую можно считать модулированной гармонической функцией [3]
![]() .
(38)
.
(38)
Коэффициент
модуляции М
определяется величиной углового
отклонения
цели от РСН - ().
Так как отсчёт времени начинается от
точки (I),
то для цели А максимум сигнала ошибки
сдвинут относительно точки I
на /2
(рис.25
![]() ).
Для целиВ
максимум сдвинут на /4
(рис. 26), для цели D
- на 3/2.
На плоскости (,)
фазовый сдвиг
определяется геометрически как угол
между осью
и лучом, проходящим через точку 0 и
положение цели. Для целей А, В, D
углы отсчитываются против часовой
стрелки (рис. 27).
).
Для целиВ
максимум сдвинут на /4
(рис. 26), для цели D
- на 3/2.
На плоскости (,)
фазовый сдвиг
определяется геометрически как угол
между осью
и лучом, проходящим через точку 0 и
положение цели. Для целей А, В, D
углы отсчитываются против часовой
стрелки (рис. 27).
Если значение диаграммы на РСН равно fр, а крутизна fр (рис. 28), то (38) можно записать в виде
![]() ,
(39)
,
(39)
где А – амплитуда принимаемых сигналов.
Второе слагаемое в (39) называется сигналом ошибки
![]() .
(40)
.
(40)
Дальнейшая задача состоит в том, чтобы используя сигнал ошибки (39) привести в движение моторы азимута и наклона так, чтобы они свели эту ошибку к нулю, то есть совместили ось вращения антенны с направлением на цель. Решение этой задачи в векторной форме иллюстрируется на рис.29.

 Цель
находится внутри конуса сопровожде-
ния и отклоняется вверх-вправо на угол
.
Направление отклонения составляет угол
с осью
. Из (40) следует, что амплитуда сигнала
ошибки пропорциональна рассогласованию
,
фаза - углу .
Таким образом, прямая 0В может
рассматриваться как вектор сигнала
ошибки в полярной системе координат.
Для управления моторами азимута и
наклона необходимо этот вектор разложить
на составляхцие
и
Цель
находится внутри конуса сопровожде-
ния и отклоняется вверх-вправо на угол
.
Направление отклонения составляет угол
с осью
. Из (40) следует, что амплитуда сигнала
ошибки пропорциональна рассогласованию
,
фаза - углу .
Таким образом, прямая 0В может
рассматриваться как вектор сигнала
ошибки в полярной системе координат.
Для управления моторами азимута и
наклона необходимо этот вектор разложить
на составляхцие
и
![]() (41)
(41)
Разложение сигнала ошибки на составляющие, пропорциональные и , можно осуществить с помощью умножителей-усреднителей (фазовых детекторов), на вторые входы которых подаются опорные напряжения U=cost и U=sint, изменяющиеся с частотой вращения антенны.
Вначале преобразуем сигнал ошибки, определяемый (40), раскрыв косинус разности t и . Тогда
![]() .
.
Обозначив![]()
![]() и учитывая (41), получим
и учитывая (41), получим
![]() .
(42)
.
(42)
Напряжение на выходе фазового детектора азимута

так
как
![]() ,
то получим
,
то получим
![]() .
(43)
.
(43)
После усреднения в сглаживающих цепях фазового детектора, второе и третье слагаемое в (43) отфильтровывается. Тогда
![]() .
(44)
.
(44)
Составляющая ошибки по углу места определяется аналогично
![]() (45)
(45)

Важно понять, что разложение сигнала ошибки на составляющие и возможно лишь потому, что опорные напряжения sint и cost изменяются строго определенным образом по отношению к опорным точкам 1,2,3,4 (рис. 23). Опорное напряжение азимута U при отклонении луча антенны вправо - положительно (антенна движется от точки 4 к точке 2), при отклонении луча влево (от точки 2 к точке 4) - отрицательно. Опорное напряжение наклона при отклонении луча вверх (оn точки 1 до точки 3) положительно, вниз (от точки 3 к точке 1) - отрицательно (рис. 30 а,б). Часто для упрощения реализации устройств в качестве опорных напряжений используют прямоугольные импульсы положительной и отрицательной полярности (рис. 30 в,г). Временные диаграммы на рис.31 иллюстрируют выделение сигнала ошибки для случая, когда цель рассогласована строго вверх, максимум напряжения Uco наблюдается в точке 2. Умножение на прямоугольные опорные напряжения эквивалентно стробированию с изменением полярности сигнала ошибки на участках, где опорное напряжение отрицательно.
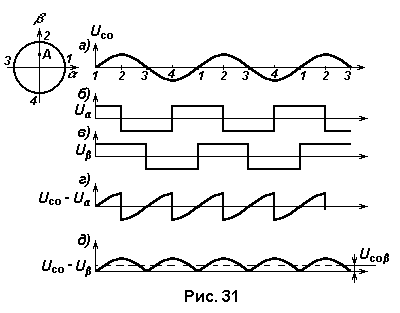
 Как
видно из рис. 31, постоянная составляющая
по наклону положительна, а по азимуту
ошибка равна нулю. На рис. 32 и 33 изображены
упрощённая функциональная схема станции
с коническим развёртыванием луча и
временные диаграммы. Синхронизатор
запускает передатчик, развёртку
индикатора и схему автоматического
сопровождения по дальности (АСД).
Как
видно из рис. 31, постоянная составляющая
по наклону положительна, а по азимуту
ошибка равна нулю. На рис. 32 и 33 изображены
упрощённая функциональная схема станции
с коническим развёртыванием луча и
временные диаграммы. Синхронизатор
запускает передатчик, развёртку
индикатора и схему автоматического
сопровождения по дальности (АСД).

Импульсы передатчика (1) через антенный переключатель (АП) передаются в антенну и излучаются. Облучатель смещён относительно фокуса параболоида и вращается с помощью мотора конического обзора (МКО), поэтому диаграмма направленности смещена относительно оси параболоида и совершает коническое вращение вокруг этой оси.
Отражённые импульсы, модулированные частотой вращения при излучении, модулируются при приёме еще раз, и через АП поступают на приёмник (диаграмма 2), где усиливаются и детектируются (3). Импульсы (4) поступают на второй вход селекторного усилителя (СУ), выделяя на дистанции цель, выбранную АСД для сопровождения (5). (Целей в конусе сканирования может находиться несколько). Модулированные импульсы с выхода СУ подаются на детектор сигнала ошибки - ДСО (пик-детектор), где выделяется огибающая (6). После фильтра (Ф) сигнал ошибки сглаживается (7) и подаётся на фазовые детекторы азимута и наклона (угла места), на другие входы подаются опорные напряжения (8,10) от генератора опорных напряжений (ГОН), связанного с мотором конического обзора. Опорные напряжения являются прямоугольными разнополярными импульсами, отличающимися от функций cost и sint. Это упрощает реализацию фазовых детекторов, хотя и приводит к появлению на их выходах дополнительных гармоник частоты сканирования. Напряжения с выходов фазовых детекторов сглаживаются в фильтрах ФА и ФН, при этом сглаживаются гармоники частоты сканирования и уменьшаются флюктуации. На выходе фильтров формируются сигналы ошибки Uco и Uco. После усиления усилителями постоянного тока сигналы ошибок поступают на электромашинные усилители (для питания моторов необходимы большие токи). Токи ошибок поступают на моторы азимута MА и наклона МН. Моторы, являясь интеграторами ошибки, управляют механизмом поворота антенны. Поворот заканчивается, когда равносигнальное направление совместится с целью и сигналы ошибок будут равны нулю. С моторов МА и МН снимаются азимут и угол места (наклон) в виде углов поворота или пропорциональных им напряжений. После преобразования в код эти данные поступают в вычислительное устройство.