

Лекции.Принят.Управ.Решений
.pdf72
признаками. Характеристикой взаимосвязи пар объектов на множестве ранжировок является матрица коэффициентов ранговой корреляции. Известны коэффициенты ранговой корреляции Спирмена и Кендалла.
Коэффициент ранговой корреляции Спирмена определяется по формуле
|
|
|
6 |
|
m |
2 |
|
|
1 |
|
|
|
|
r1j r2 j |
, |
|
|
m |
3 |
|
|
|
||||
|
|
m j 1 |
|
|
|
|||
где m – число ранжируемых объектов; r1j |
и r2j – |
ранги двух |
||||||
сравниваемых ранжировок. |
|
|
|
|
|
|
|
|
Коэффициент –1< < |
|
1. |
При |
r1j r2 j |
1 |
(прямая и |
||
обратная ранжировки). При = 0 сравниваемые ранжировки считаются линейно независимыми.
7.3.4. Вопросы количественного состава экспертной
группы при решении задач по разработке управленческих
решений
Все слабо структурируемые проблемы, требующие для своего решения привлечения экспертов, можно разбить на 2 класса.
Проблемы 1-го класса – те, в отношении которых имеется достаточный информационный потенциал знаний экспертов. В этом случае групповая экспертная оценка близка к истинному значению оцениваемого признака.
Проблемы 2-го класса – те, для которых недостаточен информационный потенциал знаний экспертов. В оценках экспертов появляются значительные расхождения. Применение осреднительных методов для получения групповой оценки может привести к большим ошибкам. Однако именно для этих проблем наиболее часто возникает необходимость в экспертной оценке.
73
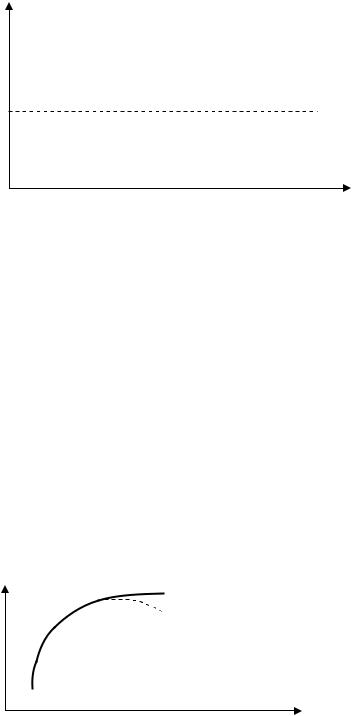
Очевидно, что с ростом численности группы достоверность
получаемых оценок растет. Однако этот рост не является
|
|
|
|
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Средн. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
арифмет. |
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,66 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
|
|
|
|
||||
нормир. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
0,57 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
0,55 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
оценка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 3 4 5 6 7 8 9
Количество экспертов
Рис. 10. Зависимость среднеарифметической нормированной
оценки значений параметра от состава группы экспертов
непрерывным, так как, начиная с некоторого момента, на групповую
оценку почти не оказывает влияния суждения отдельного эксперта.
Эта оценка стабилизируется на уровне 0,55 и n 9 (рис. 10).
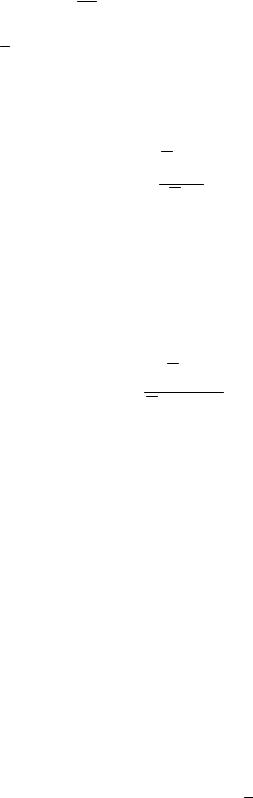
Досто-
верность
Количество экспертов
Рис. 11. Зависимость достоверности оценки от состава группы
экспертов
На рис.11 видно, что с увеличением состава группы возможно
74
снижение достоверности за счет дополнительного привлечения малоквалифицированных специалистов.
Введем следующие обозначения:
n – количество экспертов; n – требуемое минимальное
количество экспертов; an - среднеарифметическое значение оценок
n экспертов; an 1 - среднеарифметическое значение оценок группы из n+1 эксперта; с – мера влияния суждений одного эксперта на групповую оценку определяется по формуле
c an 1 ;
|
an |
||||
1,05 c 1,1 |
при b |
|
|
n ; |
|
a |
|||||
0,9 c 0,95 |
при b |
|
n . |
||
a |
|||||
Формула для определения n
c аn b n an 1 c ,
где b – оценка эксперта, более всего отклонившаяся от среднего значения.
Порядок применения этой формулы рассмотрен в следующем примере.
Пример.
1) Подбирается группа экспертов в количестве 4–5 человек, каждый из которых дает свое значение нормированной оценки
параметра:
№ эксперта |
1 |
2 |
3 |
4 |
5 |
|
|
|
|
|
|
Нормированные оценки |
0,15 |
0,10 |
0,4 |
0,11 |
0,24 |
|
|
|
|
|
|
2) по полученным оценкам находится an n 5 :

75
a5 1 0,15 0,1 0,4 0,11 0,24 0,20 ; 5
3)прогнозируется возможная оценка b=0,4;
4)задается конкретное значение с, например, с=1,1. Тогда
1,1 0,2 0,4
n 0,2 1 1,1 9.
Следовательно, группу экспертов необходимо увеличить до 9
человек.
8. МЕТОДЫ НАХОЖДЕНИЯ ОПТИМАЛЬНОГО РЕШЕНИЯ ИЗ МНОЖЕСТВА АЛЬТЕРНАТИВ ПУТЕМ ПОСЛЕДОВАТЕЛЬНОГО УЛУЧШЕНИЯ РЕЗУЛЬТАТА (МЕТОДЫ МАТЕМАТИЧЕСКОГО ПРОГРАММИРОВАНИЯ)
Математическое программирование (МП) – раздел
математики, |
в |
котором изучаются методы |
экстремизации |
||
(минимизации и максимизации) скалярной |
функции f y , |
||||
называемой |
целевой |
функцией |
n-мерного векторного аргумента |
||
y y1, , |
yn |
на |
заданном |
подмножестве YД |
(подмножестве |
допустимых решений) n-мерного векторного пространства Rn.
Возможным допустимым вариантом решения (альтернативой)
является в этом случае вектор y YД .Общая постановка задачи МП:
найти y такой, что |
|
|
|
|
|
f y max |
f y , |
Y |
Д |
Rn |
|
y |
YД |
|
|
|
|
или
|
|
|
|
|
|
|
76 |
y |
y |
|
|
y arg extr f |
y |
||
|
|||||||
|
y Y |
Д |
|||||
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
y |
|
Вектор y |
называется оптимальным допустимым решением, |
||||||
а соответствующее |
ему значение |
целевой |
функции f y – |
||||
оптимальным значением. Если оптимальное значение целевой
функции достигается более чем на одном векторе y ,то говорят, что
оптимальное решение не единственно. В зависимости от вида множества YД задачи оптимизации подразделяются на два типа:
1) задачи безусловной оптимизации, в которых допустимым
является любой n-мерный вектор, т.е. YД в этом случае совпадает с
Rn;
2) задачи условной оптимизации, когда YД Rn.
Для решения задач 1-го типа используются такие методы МП,
как:
- дифференциальные исчисления, когда f y выражается в
форме аналитической функции и всякие ограничения на альтернативы отсутствуют; оптимальное решение может быть найдено из системы уравнений
|
f |
0; ; |
f |
0; |
|
|
y1 |
yn |
|||
|
|
|
|
||
- вариационное исчисление, |
когда искомое решение не |
||||
является постоянным, а само является функцией (например,
времени);
-принцип максимума Л.С.Понтрягина;
-динамическое программирование (метод Беллмана).
Среди задач 2-го типа различают:
- задачи с ограничениями типа равенств, если
|
|
|
|
|
|
|
|
|
77 |
|||
YД y |
|
y 0, |
i |
|
, |
|||||||
|
1,m |
|||||||||||
т.е. YД включает в |
себе |
только |
те |
векторы y, которые |
||||||||
удовлетворяют системе уравнений: |
|
|
|
|
|
|
|
|
||||
i y 0; |
|
|
|
|
||||||||
i |
1,m |
; |
(1) |
|||||||||
- задачи с ограничениями типа неравенств, если |
||||||||||||
YД y |
|
i y 0; |
i |
|
, |
|||||||
|
|
|||||||||||
1,m |
||||||||||||
т.е. допустимыми решениями являются такие решения y , которые удовлетворяют системе неравенств
|
i y 0, |
|
|
|
|
||||
|
i |
1,m |
; |
|
(2) |
||||
задачи со смешанными условиями, если |
|
||||||||
YД y |
|
i y 0;i |
|
j y 0; j |
|
. |
|||
|
1,m |
m 1,l |
|||||||
Условия (1) и (2) называются ограничениями задачи. В |
|||||||||
зависимости от |
свойств целевой функции f y и |
функций |
|||||||
ограничений i y среди задач МП выделяют следующие: |
|||||||||
- задачи |
нелинейного программирования (НП), |
когда на |
|||||||
свойства целевой функции и функций ограничений не накладываются никакие условия;
- задачи выпуклого программирования (ВП), когда и
i y в виде неравенств являются выпуклыми функциями;
-задачи линейного программирования (ЛП), если f y и
i y – линейные функции;
-задачи квадратичного программирования (КП), когда f y
–квадратична, а i y – линейны;

|
|
|
|
78 |
- задачи дискретного программирования (ДП), если |
||||
множество YД |
дискретно (частным случаем являются задачи |
|||
целочисленного программирования); |
|
|
||
- |
задачи |
параметрического программирования (ПП), когда |
||
f y |
и i y |
зависят от одного |
или нескольких параметров |
|
(например, времени); |
|
|
||
- |
задачи |
стохастического |
программирования |
(СП), |
содержащие какой-либо тип неопределенности (например,
случайность отдельных параметров, отсутствие полных сведений о виде целевой функции.
В задачах МП различают понятия глобального и локального
максимумов целевой функции f y . Точка 




 называется точкой
называется точкой
глобального максимума функции f y на множестве YД , если
f y f y y YД ,
В противном случае точка y , на которой достигается max f y ,
является точкой локального максимума. Существующие методы решения задач МП в основном позволяют находить лишь точки локального максимума.
Среди перечисленных выше задач в технологии разработки управленческих решений для экономических и планово-
производственных ситуаций наибольший интерес представляют задачи ЛП. Запись этой задачи в общем виде выглядят так:
f y c1y1 c2 y2 cn yn max
при ограничениях:
a11y1 a12 y2 a1n yn b1
a21y1 a22 a2n yn b2
79
……………………. (3)
am1y1 am2 y2 amn yn bm
или в матричной форме:
|
|
|
|
|
|
|
|
max c y |
, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
y YД |
|
|
|
|
|
||
|
c c ,c |
|
YД y |
|
A y b y 0 , |
||||||||||||
|
|
|
|||||||||||||||
|
|
, ,c |
|
; |
A |
|
a |
|
|
|
mn |
|
|||||
|
|
|
|
|
|
|
|||||||||||
где |
2 |
n |
|
ij |
|
|
– матрица коэффициентов |
||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||
системы |
линейных |
|
неравенств; |
|
|
b b1,b2, ,bm T – вектор |
|||||||||||
ограничений; |
y y1, |
y2, ,yn T |
– вектор решений (альтернатив). |
||||||||||||||
Допустимыми решениями задачи ЛП, которые формируют множество YД , являются всевозможные неотрицательные векторы
y , для которых выполняется условие
A y b.
Допустимые решения называются также опорными планами.
Вектор y , значения целевой функции при котором максимально на
множестве YД , называется оптимальным решением, оптимальным планом или оптимальным управлением.
Задача ЛП имеет следующую геометрическую интерпретацию.
Введем в n-мерном векторном пространстве Rn cистему координат
0y1y2…yn. Тогда любое неравенство системы (3) делит Rn на два полупространства, в одном из которых неравенство выполняется, а в другом не выполняется. Границей этих полупространств является гиперплоскость, уравнение которой получается путем замены соответствующего неравенства на равенство. Допустимое множество YД является пересечением m+n полупространств
80
(включая n осей координат). Если YД ограничено, то оно
представляет собой выпуклый многогранник, называемый
симплексом. |
Гиперповерхности, |
координаты |
которых |
|
удовлетворяют |
условиям |
f y ; |
const, |
называются |
линиями уровня. Линии уровня в задаче ЛП – это семейство
параллельных |
гиперплоскостей |
c,y . |
Для |
всех |
точек yi , |
|||
лежащих на |
гиперплоскости |
c,y , |
значение |
целевой |
||||
функции равно . Градиентом целевой функции |
f y называется |
|||||||
вектор: |
|
|
|
|
|
|
|
|
|
|
f |
|
f |
|
|
|
|
|
f y |
, , |
. |
|
|
|
||
|
|
|
|
|
|
|||
|
|
y1 |
|
|
|
|
|
|
|
|
|
yn |
|
|
|
||
Очевидно, f y c .
Направление градиента есть направление наискорейшего возрастания целевой функции. При переходе от одной линии уровня к другой в направлении градиента значение целевой функции будет возрастать до тех пор, пока не дойдет до точки y YД , в котором оно будет максимальным. Можно показать, что оптимальное
решение y всегда находится либо в одной из вершин симплекса,
либо на одной из его граней. Графический метод применяется в основном для решения двумерных задач (n=2).
Эффективным и универсальным методом решения задач ЛП
(для любых n) является симплекс-метод, который за конечное число шагов ( итераций ) позволяет получить оптимальное решение. При этом простой перебор вершин симплекса заменяется направленным переходом от одной его вершины к соседней в направлении возрастания значений целевой функции. Переход продолжается до тех пор, пока не будет достигнута оптимальная точка.
В том случае, когда использование аналитических методов
81
затруднительно или даже невозможно (например, целевая функция задана в виде набора логических условий), для нахождения оптимального решения y применяют численные методы поиска экстремума целевой функции. Эти методы разделяют на следующие:
1)регулярные, при которых поиск оптимального решения производится по строго определенной процедуре;
2)случайные, когда при поиске используется элемент случайности.
1. Регулярные методы включают в себя:
- пассивный поиск, при котором область допустимых решений разделяется на равные интервалы, в точках пересечения которых вычисляются значения целевой функции; за оптимальную принимается та точка, где получено max (min) значение функции;
- метод покоординатного подъема (спуска), состоящий в следующем: фиксируется одна координата y2 и изменяется вторая y1
до тех пор, пока f y1,y2 возрастает (убывает), затем фиксируется
величина y1 и меняется y2 до тех пор, пока возрастать (убывать)и т.д.;
- градиентный метод, состоящий в отыскании направления,
по которому целевая функция изменяется наиболее сильно;
нахождение такого направления происходит следующим образом:
вычисляется значение в пяти точках (исходной и равноотстоящих от нее в двух взаимно перпендикулярных направлениях); найдя для них такое направление, вдоль него совершается шаг и, принимая полученную точку за новую исходную, повторяют ту же процедуру;
- метод скорейшего подъема (спуска) аналогичен предыдущему, но только в направлении наиболее сильного увеличения (уменьшения) целевой функции делают не один шаг, а