


Рис. 1.1.24
Здесь полная энергия E = K + E.
Отсюда легко найти кинетическую энергию: K = E – U.
1.1.21. Потенциальная энергия упругой деформации (пружины)
Найдём работу, совершаемую при деформации упругой пружины.
Сила упругости Fупр = –kx, где k – коэффициент упругости. Сила непостоянна, поэтому элементарная работа
dA = Fdx = –kxdx.
(Знак минус говорит о том, что работа совершена над пружиной). Тогда
(1.1.55)
.
т.е. A = U1 – U2. Примем: U2 = 0, U = U1, тогда
(1.1.56)
.
На рис. 1.1.25 показана диаграмма потенциальной энергии пружины.
39
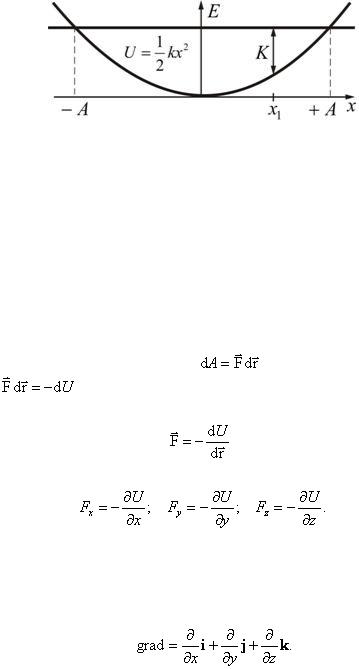
Рис. 1.1.25
Здесь E = K + U – полная механическая энергия системы, К – кинетическая энергия в точке x1.
1.1.22. Связь между потенциальной энергией и силой
Пространство, в котором действуют консервативные силы, называется потенциальным полем.
Каждой |
точке |
потенциального |
поля |
соответствует |
некоторое |
значение |
силы F , |
действующей на тело, и некоторое значение потенциальной энергии U. Значит, между |
|||||||
силой F |
и U |
должна быть |
связь |
, |
с другой |
стороны, |
dA = –dU, |
следовательно |
, отсюда |
|
|
|
|
|
|
|
|
|
|
. |
|
(1.1.57) |
|
|
|
|
|
|
|
|
|
Проекции вектора силы на оси координат:
Вектор силы можно записать через проекции:
 , (1.1.58)
, (1.1.58)
F = –grad U,
где |
. |
Градиент – это вектор, показывающий направление наибыстрейшего изменения
функции. Следовательно, вектор  направлен в сторону наибыстрейшего уменьшения
направлен в сторону наибыстрейшего уменьшения
U.
40