

5.2. Методы, использующие производные функции
Прямые методы используются при минимальных требованиях к целевой функции (x) – она считается унимодальной и вычислению подлежат значения только самой функции, но не ее производных.
Если усилить эти требования, предположив, что (x) является дифференцируемой или дважды дифференцируемой выпуклой функцией, и считать, что возможно вычисление производных (x) в произвольно выбранных точках, то эффективность процедур поиска точки минимума можно существенно повысить.
Рассмотрим
методы минимизации, в которых используются
значения производных целевой функции.
Напомним, что для выпуклой дифференцируемой
функции равенство ![]() (x)
= 0 является не только необходимым, но и
достаточным условием глобального
минимума. Поэтому, если известно, что
x
(x)
= 0 является не только необходимым, но и
достаточным условием глобального
минимума. Поэтому, если известно, что
x![]() является внутренней точкой отрезка [a;
b],
то приближенное равенство
является внутренней точкой отрезка [a;
b],
то приближенное равенство ![]() (x)
0 или
(x)
0 или ![]() (x)
может служить условием остановки
вычислений в рассматриваемых ниже
методах.
(x)
может служить условием остановки
вычислений в рассматриваемых ниже
методах.
Условие Липшица
Для определения глобального экстремума можно использовать равномерную сетку с достаточно мелким шагом (метод перебора). Однако такой подход требует слишком большого времени счета. Чтобы избежать этого, можно использовать некоторые априорные сведения о характере критерия оптимальности, позволяющие изменять шаг в процессе поиска в зависимости от ранее вычисленных значений. С этой целью можно использовать условие Липшица.
Определение.
Функция (x)
удовлетворяет условию Липшица в области
G,
если существует такая постоянная
величина L
> 0 (константа
Липшица),
что для любых двух векторов x![]() ,
x
,
x![]()
G
выполняется неравенство
G
выполняется неравенство
(x![]() )
- (x
)
- (x![]() )
Lx
)
Lx![]() - x
- x![]()
(5.8)
(5.8)
Это условие означает, что (x) убывает и возрастает не быстрее линейной функции с заданным коэффициентом L.
З а м е ч а н и я :
Если неравенство (5.8) выполняется с константой L, то оно справедливо и при всех L
 > L.
Поэтому для функции, удовлетворяющей
условию Липшица, существует бесконечное
множество констант L
из (5.8).
> L.
Поэтому для функции, удовлетворяющей
условию Липшица, существует бесконечное
множество констант L
из (5.8).
При использовании алгоритмов минимизации, включающих L как параметр, наилучшие результаты достигаются, как правило, если в качестве L берется минимальная из констант Липшица.
Из условия (5.8) непосредственно следует непрерывность (x) на отрезке [a; b]. Поэтому, согласно теореме Вейерштрасса, функция (x), удовлетворяющая на отрезке [a; b] условию Липшица, имеет на нем хотя бы одну точку минимума.
Условие (5.8) означает, что модуль углового коэффициента любой хорды графика (x) не превосходит L.
Переходя
в (5.8) к пределу при x1
- x20,
убеждаемся, что если в некоторой точке
существует касательная к графику функции
(x),
то модуль ее углового коэффициента
также не может превышать L.
Так, функция (x)
=![]() на отрезке [0; 1] условию Липшица не
удовлетворяет, потому что при x+0
угловой коэффициент касательной к ее
графику k
неограниченно возрастает (рис. 5.8).
на отрезке [0; 1] условию Липшица не
удовлетворяет, потому что при x+0
угловой коэффициент касательной к ее
графику k
неограниченно возрастает (рис. 5.8).
4.
Если функция (x)
имеет на отрезке [a;
b]
непрерывную производную, то она
удовлетворяет на этом отрезке условию
Липшица с константой L
= max![]() (x).
(x).
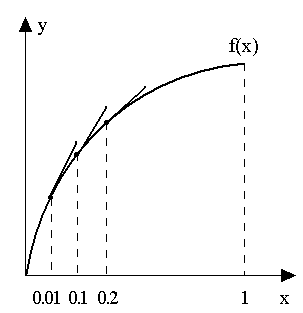
Рис.
5.8. График функции (x)
=![]() ,
x[0;
1], не влетворяющей условию Липшица
,
x[0;
1], не влетворяющей условию Липшица
По
формуле конечных приращений для
произвольных точек x![]() ,
x
,
x![]() [a;
b]
имеем:
[a;
b]
имеем:
(x![]() )
- (x
)
- (x![]() )
=
)
= ![]() ()(x
()(x![]() -x
-x![]() ),
),
где
– некоторая точка, лежащая между x![]() и x
и x![]() .
Отсюда с учетом условия
.
Отсюда с учетом условия![]() ()
max
()
max![]() (x)
= L
получаем неравенство (5.9) для (x).
(x)
= L
получаем неравенство (5.9) для (x).
5.
Если a
= x![]() <
x
<
x![]() <…<
x
<…<
x![]() = b,
а функция (x)
непрерывна на [a;
b]
и удовлетворяет условию (5.9) на каждом
из отрезков [x
= b,
а функция (x)
непрерывна на [a;
b]
и удовлетворяет условию (5.9) на каждом
из отрезков [x![]() ;
x
;
x![]() ],
i
= 0,1,…, n-1,
с константой L
],
i
= 0,1,…, n-1,
с константой L![]() ,
то она удовлетворяет условию Липшица
и на всем отрезке [a;
b]
с константой
,
то она удовлетворяет условию Липшица
и на всем отрезке [a;
b]
с константой
![]()
Использование
условия Липшица позволяет ускорить
процедуру детерминированного перебора
значений проектируемых параметров при
определении критерия оптимальности.
На рис. 5.9. представлена функция одной
переменной, удовлетворяющая условию
Липшица на отрезке 0
x
a
с константой L![]() .
После того, как найден локальный минимумx
.
После того, как найден локальный минимумx![]() функции (x),
удается ускорить поиск остальных
локальных минимумов по сравнению с
полным перебором на равномерной сетке.
функции (x),
удается ускорить поиск остальных
локальных минимумов по сравнению с
полным перебором на равномерной сетке.

Рис. 5.9. Функция, удовлетворяющая условию Липшица
Пусть
h![]() – некоторый шаг, осуществленный из
точки локального минимумаx
– некоторый шаг, осуществленный из
точки локального минимумаx![]() .
Если в точке x
.
Если в точке x![]() +
h
+
h![]() значение функции
не меньше, чем в точке x
значение функции
не меньше, чем в точке x![]() ,
т.е. (x
,
т.е. (x![]() +h
+h![]() )
(x
)
(x![]() ),
то, исходя из условия (5.8), можно определить
ближайшую точку, в которой функция (x)
может достигнуть значения (x
),
то, исходя из условия (5.8), можно определить
ближайшую точку, в которой функция (x)
может достигнуть значения (x![]() )
(подозрительного на глобальный минимум).
)
(подозрительного на глобальный минимум).
Действительно, согласно (5.8) функция (x) убывает не быстрее, чем линейная функция:
(x)
= (x![]() .
+h
.
+h![]() )+L
)+L![]() [x
- (x
[x
- (x![]() +
h
+
h![]() )].
)].
Отсюда
следует, что точка x![]() ,
в которой необходимо произвести новое
пробное вычисление функции (x),
может быть получена из условия
,
в которой необходимо произвести новое
пробное вычисление функции (x),
может быть получена из условия
(x)
= (x![]() ),
),
т.е.
x![]() =
(x
=
(x![]() +h
+h![]() )
+
)
+
![]() (5.9)
(5.9)
Поскольку
(x![]() )
(x
)
(x![]() )
(рис. 5.9), к ней также можно применить
сформулированный выше алгоритм для
определения следующей пробной точки
x
)
(рис. 5.9), к ней также можно применить
сформулированный выше алгоритм для
определения следующей пробной точки
x![]() .
.
В
точке x![]() выполняется равенство (x
выполняется равенство (x![]() )
= (x
)
= (x![]() ),
поэтому из нее производится поиск
локального минимума одним из известных
методов. В точке x
),
поэтому из нее производится поиск
локального минимума одним из известных
методов. В точке x![]() достигается значение меньшее, чем (x
достигается значение меньшее, чем (x![]() ),
поэтому все дальнейшие шаги до конца
отрезка определяются исходя из (x
),
поэтому все дальнейшие шаги до конца
отрезка определяются исходя из (x![]() ).
Ввиду того, что не оказывается новых
точек, подозрительных на глобальный
оптимум, поиск заканчивается.
).
Ввиду того, что не оказывается новых
точек, подозрительных на глобальный
оптимум, поиск заканчивается.