

1
2.2. Математические модели дискретных каналов с памятью
Введем ряд понятий (сущностей), определений и обозначений.
Множество состояний канала с памятью (КСП) – характеризует конечное множество состояний, в которых может находиться КСП. Обозначим через R – мощность этого множества. Например, R = 2 означает, что КСП может находиться в двух состояниях: {G («good – хорошее») и B («bad – плохое»)}. Если параметр R = 3, то КСП может находиться в трех состояниях: {G, GB, B} и т.д. В общем случае обозначим состояния КСП через переменную С, которая может принимать R значений.
Введем понятие память канала глубины l, которое означает, что существует статистическая связь между текущим состоянием канала С0 и l предшествующими состояниями канала. Эта связь количественно оценива-
ется переходной вероятностью: P(C0 C−1,C−2 ,...C−l ), т.е. вероятность пере-
хода из предшествующего состояния, в котором находился канал С–1, в рассматриваемое (С0) статистически определяется (l – 1) предшествующих состояний, в которых побывал канал связи. Последовательность состояний КСП глубины l – C−1,C−2 ,...,C−l образует состояние памяти КСП
глубины l. Мощность множества состояний памяти канала глубины l определяется как NП = Rl . Для описания дискретного канала с памятью (ДКП)
необходимо задать матрицу переходных вероятностей состояний памяти канала, называемую в дальнейшем матрицей памяти – МП, и множество
матриц ошибок {M 0ν} ν =(1, R) , характеризующих каждое состояние
СДКП.
2.2.1.Стационарныйk-ичныйдискретныйканалспамятьюглубины l
Ниже рассматриваем модели только стационарных ДКП, поэтому определение «стационарный» опускаем.
Матрица памяти ДКП имеет вид:
1 2 … ν…R
1 |
|
|
|
2 |
|
|
|
MП = : |
p( ν |
µ |
) |
µ |
|
|
:
Rl
МП имеет размерность [Rl ×R], и для каждой ее строки выполняется условие нормирования

2
∑R p( νµ) =1, µ =1, Rl .
ν=1
С учетом условия нормирования размерность матрицы памяти, определяющая минимальное число параметров, однозначно задающих МП и определяемых экспериментально, определяется как
N |
П |
= Rl (R −1). |
(2.10) |
|
|
|
Пример 2.1. ДКП характеризуются двумя состояниями {G, B}={0,1},
т. е. R = 2, глубина памяти l = 2. Тогда матрица памяти имеет вид
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
||||
00 |
|
|
|
|
|
|
|
|
|
|
|
00 |
|
p(0 |
00 |
) |
p( 1 |
|
) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
00 |
|
|
||
MП = 01 |
|
|
|
|
|
|
|
|
|
= |
01 |
|
p(0 01) |
p( 101) |
|
|
|||||||
|
|
|
C |
|
|
|
|
|
. |
|
|||||||||||||
10 |
|
|
p |
0C ,C |
|
|
|
10 |
|
p(0 |
) |
p( 1 |
|
) |
|
||||||||
|
|
|
|
|
−1 −2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
10 |
|
|
||
11 |
|
|
|
|
|
|
|
|
|
|
|
11 |
|
p(0 |
) |
p( 1 |
) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
11 |
|
|
|
Заметим, что p( |
0 |
|
) |
= p( |
00 |
|
), p( |
1 |
|
) = p( |
C0 |
|
|
|
|
10 |
). |
||||||
|
|
|
|
|
|
|
|
|
|
|
C |
) = p( |
|||||||||||
|
|
|
|
01 |
|
|
|
|
01 |
|
01 |
|
|
|
−1,C−2 |
|
|
|
01 |
||||
Для этого частного случая последовательность смены состояний ДКП такова:
...C−2 ,C−1,C0 → BGB101 .
Согласно (2.10) размерность МП определится по формуле
NП = 22 1 = 4 ,
т. е. переходные вероятности каждого столбца однозначно задают матрицу памяти данного примера.
Как отмечалось выше, каждое состояние ДКП характеризуется своей матрицей ошибок:
C1 C2 ... Cν... CR ,
M 10 M 02 ...M 0ν...M 0R .

3
Размерность каждой матрицы ошибок, как и в случае канала без памяти, равна [k ×k](для k-ичного канала).
Для каждой строки матрицы выполняется условие нормирования:
k |
ν |
|
y |
j |
|
|
|
|
|
|
( |
x |
) =1, |
i =1, k. |
|||||||
∑ p |
|
|
||||||||
j=1 |
|
|
|
|
|
i |
|
|
|
|
Вид матрицы ошибок ДКП, находящихся в состоянии Cν :
y1 …yj…yk
|
x1 |
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
M ν0 = |
xi |
p |
ν |
( |
y j |
xi ) |
. |
|
: |
|
|
|
|||
|
|
|
|
|
|
|
|
|
xk |
|
|
|
|
|
|
С учетом условия нормирования размерность каждой из R матриц ошибок, равная минимальному числу параметров, определяемых экспериментально и однозначно задающих матрицу ошибок, составляет
N (1) |
= k(k −1) . |
(2.11) |
0 |
|
|
Суммарное число параметров всех R матриц ошибок
N (1) |
= k(k −1)R . |
(2.12) |
0 |
|
|
Таким образом, полная размерность модели ДКП, с учетом (2.10) и (2.12), определяется как
N M |
= Rl (R −1) + k(k −1)R. |
(2.13) |
|||||
Пример 2.2. Рассмотрим двоичный ДКП с двумя состояниями G и B |
|||||||
(R = 2) и памятью глубины l = |
2 : |
G |
B |
|
|||
M |
G |
M |
B . Тогда, согласно (2.10); |
||||
|
|
|
0 |
0 |
|
||
NП = 22 1 = 4 и, согласно |
|
|
|
|
|
||
(2.12), |
N0 = 2 1 2 = 4. |
Полная размерность |
|||||
рассматриваемого ДКП, согласно (2.13), определяется как NM = 4 +4 =8.

4
2.2.2. Двоичный дискретный канал с памятью глубины l (ДДКП)
Матрица памяти ДДКП с числом состояний R имеет вид
1 |
1 2 … |
|
ν…R |
|
|
|
|
|
|
2 |
|
|
|
|
MП = : |
p( |
ν |
µ) |
. |
µ |
|
|||
: |
|
|
|
|
Rl |
|
|
|
|
Следовательно, размерность матрицы памяти МП определяется согласно (2.10).
Матрица ошибок ДДКП, находящихся в µ-м состоянии µ = (1, R), имеет вид
|
|
= 0 |
0 |
1 |
|
|
M µ |
pµ00 |
pµ01 |
, |
|
|
0 |
1 |
p10µ |
p11µ |
|
|
|
|
|||
где P ν |
– вероятность перехода символа i на входе ДДКП в символ j на |
||||
ij |
|
|
|
|
|
выходе ДДКП, находящемся в µ-м состоянии.
Размерность каждой из R матриц ошибок, согласно (2.11), определя-
ется как N0 |
(1) = 2. |
|
Полная размерность модели ДДКП согласно (2.12) |
|
|
|
NM = Rl (R −1) +2 R . |
(2.14) |
Пример 2.3. Для данных примера 2.2 определим полную размерность модели ДДКП.
Согласно (2.14) NM = 22 1+2 2 =8.
Для частного случая симметричного двоичного ДКП глубины l (симметричность распространяется на матрицы ошибок ДСДКП) справед-
ливы следующие утверждения: NП определяется из (2.10), N (01) =1 и
NM = Rl (R −1) + R . |
(2.15) |
Например, для данных предыдущего примера NM = 22 1+2 = 6.
5
Практический интерес представляют модели ДСДКП с числом независимых параметров (размерностью) не более 4–5, т.е. с харак-
теристиками вида: R = 2, l = 1, k = 2 и NM = 21 1+1 2 = 4.
Наиболее популярными моделями, отвечающими этим требованиям, являются модель Гильберта, модель Гильберта–Эллиота, модель Пуртова, которые рассматриваются ниже.
Прежде чем описать упомянутые модели, введем понятие, характерное для симметричных двоичных дискретных каналов с памятью, – пакет ошибок длины b. Это вектор ошибок длины b, первая и последняя компоненты которого всегда равны единице. Число единиц и нулей внутри пакета распределяется произвольно, но при этом число подряд идущих нулей должно быть меньше некоторого числа bЗ, называемого защитным интервалом.
Пример 2.4. Пусть дан некоторый поток ошибок:
….0 0 0 0 1 0 0 1 0 1 1 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0…. b = 9 b = 4 b = 1 b = 3
Пусть bЗ = 3, тогда в данном потоке ошибок можно выделить 4 пакета с длинами соответственно 9, 4, 1 и 3. В литературе иногда вместо термина пакет ошибок используют термин пачка ошибок.
2.2.3. Модель Гильберта
Это трехпараметрическая модель [2], описывающая ДСДКП с глуби-
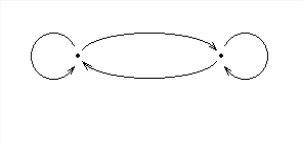
ной памяти l = 1. В основе модели – элементарная цепь Маркова, выделяющая два состояния канала (R = 2): «хорошее состояние» (G), в котором ошибки не возникают, и «плохое состояние» (В), в котором вероятность ошибки в одном разряде составляет рε. Граф марковской цепи показан на рис. 2.5.
Рис. 2.5. Граф переходов состояний ДСДКП модели Гильберта
|
pGB |
pGG |
pBB |
G |
B |
pBG pε
Матрица памяти канала имеет вид

6
|
|
G |
B |
||
M П =G |
|
pGG |
pGB |
|
. |
|
|
||||
B |
|
pBG |
pBB |
|
|
Согласно модели Гильберта матрица ошибок имеет место только в состоянии В:
|
0 |
1 |
|
|
|
M 0 = 0 |
|
1 − pε |
pε |
|
. |
|
|
||||
1 |
|
pε |
1 − pε |
|
|
Таким образом, с учетом (2.15) размерность модели Nм = Nп + N0 = = 2 + 1 = 3, т. е. модель Гильберта полностью описывается тремя парамет-
рами: рε, рGB, рBG, которые должны быть определены экспериментально. Имея указанные параметры, можно аналитически вычислить вероятностные показатели, характеризующие условия передачи информации по ДСДКП с глубиной памяти l =1.
Определим вероятности пребывания канала в состояниях G и B как финальные вероятности марковской цепи:
p(G) = p(G) pGG + p(B) pBG = p(G) pGG + (1 – p(G)) pBG,
p(G) = |
pBG |
, |
(2.16) |
pGB + pBG |
p(B) = p(B) pBB + p(G) pGB = p(B) pBB + (1 – p(B)) pGB,
p(B) = |
pGB |
|
pGB + pBG . |
(2.17) |
Если pGG или pBB велики, то наблюдается тенденция к сохранению возникшего состояния G или В, что и моделирует канал с пакетными (коррелированными) ошибками. В состоянии В возникает пакет ошибок.
Для вычисления вероятности возникновения ошибок определенной кратности в большинстве моделей ДСДКП, используемых на практике и описываемых простыми цепями Маркова, принимают следующее допущение. Считается, что в различных состояниях памяти канала имеет место биномиальное распределение ошибок, с соответствующей вероятностью ошибки [3]. Тогда, с учетом изложенного, определим вероятность ошибки на символ в ДСДКП:
p |
p p |
|
= |
pε pGB |
. |
(2.18) |
|
|
|||||
ош |
ε |
B |
|
pGB + pBG |
|
|
|
|
|
|
|||
7
Вероятность ошибки кратности i среди n символов, передаваемых по ДСДКП,
n |
|
(1 − p |
|
)n−i . |
(2.19) |
P(i, n) pi |
|
||||
i |
ош |
|
ош |
|
|
Вероятность искажения кодовой серии длины n
P(≥1, n) 1 −(1 − p |
ош |
)n . |
(2.20) |
|
|
|
Вероятность ошибки рош определяется из (2.18) и учитывает память канала.
2.2.4. Модель Гильберта – Эллиота
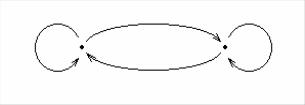
Это четырехпараметрическая модель ДСДКП [2,4] с глубиной памяти l = 1 и числом состояний канала R = 2. В отличие от предыдущей модели в данной модели допускается появление ошибок как в «хорошем» (G), так и в «плохом» (В) состояниях канала соответственно с вероятностями
pε0 и pε1.
Граф марковской цепи показан на рис. 2.6.
|
|
pGB |
pGG |
pBB |
|
|
G |
B |
|
pε0 |
pBG |
|
pε1 |
|
Рис. 2.6. Граф переходов и состояний ДСДКП модели Гильберта – Эллиота
Матрица памяти данной модели аналогична предыдущей. Матрица ошибок в ν-м состоянии памяти канала имеет вид
|
0 |
1 |
pεν ={pε0 , pε1}. |
M 0ν = 0 |
1 − pεν |
pεν |
|
1 |
pεν |
1 − pεν |
|
С учетом (2.16) размерность модели
8
NМ = NП + N0 = 2 · (2 – 1) + 2 = 4.
Модель Гильберта – Эллиота полностью описывается четырьмя па-
раметрами: pε0, pε1, pBG, pGB. Вероятности p(G) и p(B) определяются по
(2.16) и (2.17).
Вероятность ошибки на символ
p |
|
p |
|
p |
|
+ p |
|
p |
|
= |
pε0 pBG + pε1 pGB |
. |
(2.21) |
|
|
|
|
|
|
||||||||
|
ош |
|
ε0 |
|
G |
|
ε1 |
|
B |
|
pGB + pBG |
|
|
Вероятности р(i, n) и р (≥1, n) приближенно оцениваются выражениями, аналогичными (2.19) и (2.20).
2.2.5. Модель Пуртова
Модель ДСДКП, предложенная Л.П. Пуртовым [5], является многопараметрической и достаточно сложной. В то же время для практического использования им рекомендуется двухпараметрическая упрощенная модель, которая и будет рассмотрена ниже.
Согласно рассматриваемому подходу вероятность искажения серии из n элементов, передаваемой по каналу с пакетирующимися ошибками, определяется как
P(≥1, n) n1−α p. |
(2.22) |
Параметры модели: α – коэффициент пакетирования ошибок; р – вероятность ошибки на символ. При α →0 P(≥1, n) np , т. е. выражение
совпадает с оценкой вероятности искажения в канале с независимыми ошибками. При α →1 P(≥1, n) p , т. е. при любом искажении символа
начинается пакет ошибок.
Вероятность ошибки кратности не меньше i в серии длины n,
n 1−α |
|
|||
P(≥i, n) = |
|
|
p . |
(2.23) |
|
||||
i |
|
|
||
Вероятность i-кратной ошибки в серии длины n
n 1−α |
|
n |
|
1−α |
|
|
||
P(i, n) = |
|
|
p − |
|
|
|
p . |
(2.24) |
|
|
|
||||||
i |
i + |
1 |
|
|
||||
В заключение отметим, что, как показали экспериментальные исследования, большинство современных коммутируемых телефонных каналов достаточно корректно описывается моделями ДСДКП.