

76. Дистанционные защиты (дз).
Один из способов
защиты сложных систем – использ-ние
ДЗ. ДЗ - защита, время действия которой
зависит от расстояния (дистанции) между
местом установки защиты и точкой КЗ.
Выдержка времени нарастает в зав-ти от
увелич-я расстояния до т очки
КЗ.При таком принципе ближайшая к месту
КЗ защита всегда будет иметь меньшую
выдержку времени. ДЗ всегда выполняются
направленными.
очки
КЗ.При таком принципе ближайшая к месту
КЗ защита всегда будет иметь меньшую
выдержку времени. ДЗ всегда выполняются
направленными.
На рис. представлена
условная сх.замещ-я ЛЭП. Слева изображен
ист.питания, представляемый ЭДС системы
Eс
и эквивалентным сопр-ем энергосистемы
Zc.
Справа от ЛЭП изображено сопр-ние Zнaгp,
выполняющее роль потребителя мощ-ти. В
норм.режиме в месте установки реле
сопр-ния протекает ток Iн.р , a
TV
измеряет напряжение Uн.р
„ на шинах. Отнош-е напряжения к току
хар-ет общее (эквивалентное) сопр-ние
всего участка изображенной сети в
норм.режиме
![]()
По величине
![]() >>Zc
+ ZЛЭП,
и общее комплексное сопр-ние имеет
активно-индуктивный хар-р, причем
акт.сост-щая сопр-ния больше, чем реакт.
Это связано с тем, что обычно Рнагр
> Qнагр.
При возникновении
КЗ сопр-ние Zнaгp
шунтируется, происходит снижение
напряжения Uкз
и резкое увеличение тока Iкз.
Экв-ное сопр-ние участка значит-но
сниж-ся за счет отсекания Zнaгp
и части Zлэп,
при этом
>>Zc
+ ZЛЭП,
и общее комплексное сопр-ние имеет
активно-индуктивный хар-р, причем
акт.сост-щая сопр-ния больше, чем реакт.
Это связано с тем, что обычно Рнагр
> Qнагр.
При возникновении
КЗ сопр-ние Zнaгp
шунтируется, происходит снижение
напряжения Uкз
и резкое увеличение тока Iкз.
Экв-ное сопр-ние участка значит-но
сниж-ся за счет отсекания Zнaгp
и части Zлэп,
при этом
![]() .
Т.о.,
.
Т.о.,![]() значит-но уменьш-ся по модулю в сравнении
с
значит-но уменьш-ся по модулю в сравнении
с![]() ,
и т.к. для эл-тов энергосистемы о
,
и т.к. для эл-тов энергосистемы о бычно
вып-ся усл-еR
< X,
то ZK3
поворачивается отн-но Zн.р,
как это изображено на рис:
бычно
вып-ся усл-еR
< X,
то ZK3
поворачивается отн-но Zн.р,
как это изображено на рис:
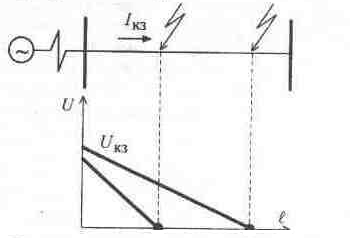
Если КЗ явл-ся
3хфазным и металлическим, то остаточное
напряж-е на шинах ПС Uкз
будет зависеть от расст-я до точки КЗ в
соотв-вии с графиком, приведенным на
рис.2, т.к. на каждом км ЛЭП происходит
падение напряж-я на величину
![]() ,
гдеZ0
– уд.сопр-ние
ЛЭП, Ом/1 км.
,
гдеZ0
– уд.сопр-ние
ЛЭП, Ом/1 км.
Т
Рис.Напряжение вдоль
ЛЭП при КЗ
 .о,принцип действия ДЗ
основан на резком снижении сопр-ния при
КЗ. В связи с тем, что при КЗ напряж-е
сниж-ся, а ток увелич-ся, ДЗ получаются
более чувствит-ми, чем токовые, т.к.
реагируют на измен-е сразу 2х пар-ров -
тока и напряж-я. Причем сопр-ение при КЗ
уменьш-ся в неск-ко раз > по сравн-ю с
уменьш-ем напряж-я или увелич-ем тока.
.о,принцип действия ДЗ
основан на резком снижении сопр-ния при
КЗ. В связи с тем, что при КЗ напряж-е
сниж-ся, а ток увелич-ся, ДЗ получаются
более чувствит-ми, чем токовые, т.к.
реагируют на измен-е сразу 2х пар-ров -
тока и напряж-я. Причем сопр-ение при КЗ
уменьш-ся в неск-ко раз > по сравн-ю с
уменьш-ем напряж-я или увелич-ем тока.
Осн.эл-т ДЗ -
дистанционный орган, опред-щий удаленность
КЗ от места установки защиты. В кач-ве
его используют реле сопр-ния, реагирующее
чаще всего на полное сопр-ние
![]() .
Для обеспечения селективности:
.
Для обеспечения селективности:
- ДЗ выполняются направленными, для этого применяется реле направления мощ-ти или направленное реле сопр-ния:
- выдержки времени у защит, работающих при одном направлении мощности, согласуются между собой. Выдержка времени защиты при к.з. за пределами защищаемой линии на Δt больше, чем на соседней.
Для реле сопр-ния, используемого в ДЗ, наиболее наглядно изображает на плоскости рабочую и нерабочую зоны хар-ка срабатывания.
Рис
3. Хар-ка срабатывания реле сопр-ния.
Хар-кой сраб-ния
реле сопр-ния наз-ся зависимость
![]() .
Реле сопр-ния подключено к ТА и ТV.
Если измеряемое сопр-ние
.
Реле сопр-ния подключено к ТА и ТV.
Если измеряемое сопр-ние
![]() попадает внутрь хар-ки сраб-ния реле,
изображаемой в координатах (R,
jX)
- рис. 3, то оно замыкает свои контакты,
если не попадает, то контакты реле
остаются разомкнутыми. Если место
установки защиты совместить с началом
координат, то для ненаправленного реле
полного сопротивления
попадает внутрь хар-ки сраб-ния реле,
изображаемой в координатах (R,
jX)
- рис. 3, то оно замыкает свои контакты,
если не попадает, то контакты реле
остаются разомкнутыми. Если место
установки защиты совместить с началом
координат, то для ненаправленного реле
полного сопротивления
![]() будет
иметь вид окружности (рис. 3), радиус
которойZ
= ZCp
выставлен
на реле сопр-ния. Т.о, хар-ка
будет
иметь вид окружности (рис. 3), радиус
которойZ
= ZCp
выставлен
на реле сопр-ния. Т.о, хар-ка
![]() представляет
собой геометрич.место точек, удовл-щих
усл-ю
представляет
собой геометрич.место точек, удовл-щих
усл-ю![]() .
При
.
При![]() реле
работает, при
реле
работает, при![]() - не работает. Следовательно, реле
сопротивления явл-ся реле минимального
действия, которое срабатывает при
уменьшении воздействующей величины.
Хар-ки сраб-ния
направленного реле имеют вид, показанный
на рис. 4:
- не работает. Следовательно, реле
сопротивления явл-ся реле минимального
действия, которое срабатывает при
уменьшении воздействующей величины.
Хар-ки сраб-ния
направленного реле имеют вид, показанный
на рис. 4:
Д ля
всех реле сопр-ния необходимо выполнение
следующих требований:
ля
всех реле сопр-ния необходимо выполнение
следующих требований:
1. Быстродействие, чтобы мгновенная ступень отключала КЗ как можно быстрее.
2. Точность работы
![]() реле
не должно отличаться от
реле
не должно отличаться от![]() более, чем на 10%. Это требование обеспечивает
стабильность зон ДЗ.
более, чем на 10%. Это требование обеспечивает
стабильность зон ДЗ.
3. Высокое значение
![]()
Зав-сть выдержки
времени защиты t=f(![]() )
может возрастать плавно или ступенчато
(рис.5).Технически наиболее просто
выполнена ступенчатая зависимость.
)
может возрастать плавно или ступенчато
(рис.5).Технически наиболее просто
выполнена ступенчатая зависимость.
ДЗ, используемые в энергосистемах, имеют 3 или 4 ступени.
Рис.
5. Завис-сть t=f( Реле
сопр-ния, основной э
Реле
сопр-ния, основной э
![]() )
)
Условие работы
реле сопротивления можно записать
следующим образом:
![]() .
.
Рис. 7. Зависимость
![]() .
.
Реле сопр-ния
работают с погрешностью, т.е.
![]() - действительное значениеZcp
отличается
от установленного Zyст.
Основными причинами этого явл-ся мех-кие
моменты реле ИО и другие факторы,
ограничивающие чувствит-сть конструкций
реле, а также нелинейность магнитопроводов
и выпрямителей реле. Хар-р зав-сти
- действительное значениеZcp
отличается
от установленного Zyст.
Основными причинами этого явл-ся мех-кие
моменты реле ИО и другие факторы,
ограничивающие чувствит-сть конструкций
реле, а также нелинейность магнитопроводов
и выпрямителей реле. Хар-р зав-сти
![]() приведен
на рис.7.
приведен
на рис.7.
Отличие Zcp
от Zyст
особенно значительно при малых и больших
значениях Iр.
Если Up
= 0, то реле сработает только в случае
![]() .
При увеличенииIр
величина ΔZ
уменьшается. При больших значениях Iр
величина ΔZ
снова возрастает. Из графика видно, что
существует область токов Iр,
при которых отличие Zcp
от Zyст
практически отсутствует, т.е. работает
с минимальной погрешностью
.
При увеличенииIр
величина ΔZ
уменьшается. При больших значениях Iр
величина ΔZ
снова возрастает. Из графика видно, что
существует область токов Iр,
при которых отличие Zcp
от Zyст
практически отсутствует, т.е. работает
с минимальной погрешностью
![]() .
.
ДЗ явл-ся основными защитами ЛЭП 35; 110 кВ. На ЛЭП 220 кВ и 500 кВ они используются как резервные.