

39. Типовая методика структурно-параметрического синтеза контуров регулирования су им по желаемой передаточной функции. Привести пример.
Рассматриваемая методика широко применяется при синтезе систем подчиненного регулирования координат электроприводов и базируется на компенсации больших постоянных времени (БПВ) объекта упр-я устр-ом упр-я. Послед-ть этапов синтеза:
Структурно-параметрическая декомпозиция объекта управления.
Линейный объект управления разбивают на n последовательно соединенных динамических звеньев с одним или двумя доминирующими полюсами (апериодические первого-второго порядка и интегрирующие); в объект регулирования каждого контура последовательно включают фильтр (апериодическое звено первого порядка) с эквивалентной малой постоянной времени (ЭМПВ) T,i, i = 1,…, n; величину эквивалентной малой постоянной времени T,i каждого контура регулирования выбирают как минимум в 2 раза больше эквивалентной малой постоянной времени предыдущего контура регулирования, т. е. T , i 2T , i-1, i = 2,…, n .
В результате структурно-параметрической декомпозиции в объекте каждого контура регулирования должны быть выделены 1-2 БПВ и одна ЭМПВ T , i .
Выбор критерия качества регулирования контура.
За критерий качества регулирования каждого контура принимаем желаемую передаточную функцию разомкнутого контура. Для электромеханических СУ ЭП целесообразно применять настройки контуров регулирования на ТО или СО. Желаемую передаточную функцию разомкнутого контура в этом случае записывают в виде:
а) при настройке на ТО:
![]() , (1)
, (1)
б) при настройке на СО:
![]()
3. Определение структуры и параметров регулятора каждого контура регулирования (структурно-параметрический синтез регуляторов).
Передаточная функция оптимального регулятора i–го контура определяется в виде:
![]() (2) где
Wоу,
i
(p)
– передаточная функция объекта
регулирования, входящая в
i
– й контур регулирования;
(2) где
Wоу,
i
(p)
– передаточная функция объекта
регулирования, входящая в
i
– й контур регулирования;
Wос, i (p) – передаточная функция звена отрицательной обратной связи i-го контура регулирования.
Далее производится расчет численных значений параметров синтезированных регуляторов (коэффициентов передач, постоянных времени интегрирования, дифференцирования).
4. Выбор элементной базы и расчет параметров принципиальной схемы регулятора каждого контура.
Современные электронные устройства управления непрерывных систем управления реализуют, на основе операционных усилителей в интегральном исполнении. Расчет параметров принципиальной схемы регулятора сводится к расчету численных значений резисторов и конденсаторов во входной цепи и цепи обратной связи операционного усилителя.
Рассмотрим применение рассмотренной методики для синтеза контура регулирования тока якоря электродвигателя постоянного тока. Структурная схема системы регулирования приведена на рис1.
1. ОУ представляет собой 2 аперио-х звена первого порядка, описывающих тиристорный преобразователь (Kтп и Tтп – его параметры) и якорную цепь двигателя. При синтезе контура рег-я тока якоря обр-ой связью по э.д.с. двигателя Eд можно, пренебречь, поскольку скорость ее изменения значительно ниже скорости изменения тока якоря.
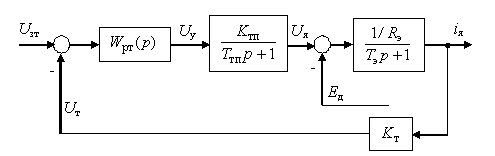
Рис1. Структурная схема контура регулирования тока якоря электродвигателя
К большим постоянным времени объекта управления относится постоянная времени Tэ электромагнитной цепи, к малым – постоянная времени Tтп тиристорного преобразователя. Тогда эквивалентная малая постоянная времени контура регулирования тока Tт = Tтп.
2. Зададимся настройкой контура регулирования тока на ТО, т. е. критерием качества в виде (1).
3. Тогда структура регулятора тока якоря в соответствие с (2) после элементарных преобразований будет иметь вид
 , т.
е. является пропорционально-интегральной
(ПИ).
, т.
е. является пропорционально-интегральной
(ПИ).
Параметры этого регулятора:
![]() ,
,
![]() ,
,
![]() ,
причем только 2 из них являются
независимыми, поскольку
,
причем только 2 из них являются
независимыми, поскольку
![]() .
.
4. Для расчета параметров регулятора рассмотрим его принципиальную схему на основе операционного усилителя (рис2.).

Рис2. Принципиальная схема ПИ-регулятора тока якоря
Заметим, что принципиальная схема регулятора содержит 4 элемента Rзт , Rот , Rост и Сот, значения которых неизвестны, однако в распоряжении проектировщика имеется лишь 2 параметра регулятора (см. п. 3). Зададимся значением емкости Сот, например Сот = 1 мкф. Тогда Rост = Tэ / Сот , Rзт = Rост / Kрт .
Поскольку сумма
входных токов операционного усилителя
в потенциально нулевой точке M
(см. рис.2) равна нулю, то
![]() .
Отсюда
.
Отсюда![]() ,
гдеUзт
, Uост
– напряжения
задания и обратной связи по току,
соответствующие максимально допустимому
току якоря.
,
гдеUзт
, Uост
– напряжения
задания и обратной связи по току,
соответствующие максимально допустимому
току якоря.