

Энергетические показатели трансформатора.
Трансформатор – статистический электромагнитный аппарат преобразующий систему переменного тока одного напряжения в систему переменного тока другого напряжения.Назначение: трансформаторы служат для передачи и распределения электроэнергии потребителей.
Потери ХХ . Мощность, потребляемая трансформатором при ХХ идет на покрытие в обмотках и стали: P0 = p эл1 + Pмагн
pэл1 = 1 2% от P0
Поэтому, мощность при ХХ трансформатора идет в основном на покрытие потерь в стали (на гистерезис и вихревые токи).
 pr
= r(f/100)B2
pr
= r(f/100)B2
Pосн мг
 pb
= вх(f/100)2B2
pb
= вх(f/100)2B2
pдоб = 15 20% Pосн мг Итак P0 = (1,15 1,2) Pмго
Потери КЗ. При коротком замыкании трансформатор потребляет из сети активную мощность. Эта мощность в основном идет на покрытие потерь в обмотках. Так как потери в стали pмг = B2 ; B U
При коротком замыкании напряжение уменьшено в 1520 раз, то потери в стали будут ничтожно малы и ими можно пренебречь.
опыт xx определяет: параметры цепи намагничивания, потери в стали, определяем коэффициент тр-ции.
Определение параметров цепи намагничивания экспериментально zm, xm,rm.
z0
= ;r0
=
;r0
=
 ;x0
=
;x0
=
 т. к.r1
<< rm
x1
<< xm
, то zm
z0
=
т. к.r1
<< rm
x1
<< xm
, то zm
z0
=
 ;
rm
r0
=
;
rm
r0
=
 ;xm
x0
=
;xm
x0
=
 потери в стали -Pосн
мг; коэффициент тр-ции к=w1/w2
потери в стали -Pосн
мг; коэффициент тр-ции к=w1/w2
Опыт
КЗ
– это режим, когда вторичная обмотка
накоротко замкнута, а к первичной обмотке
подводится такое пониженное напряжение,
когда по обмоткам протекает (ток)
номинальный ток – это UК
– напряжение короткого замыкания. UK
выражается в % . U
K%
=
 ,
, ;
; ;
; ;
; .
.
КПД. можно получить через данные полученные в опыте холостого хода и короткого замыкания.
 при холостом ходе
P0
= PМГ
При коротком замыкании PК=
PЭЛ1,2
= I2rк,
при холостом ходе
P0
= PМГ
При коротком замыкании PК=
PЭЛ1,2
= I2rк,
 .
Тогда
.
Тогда ;PКH
– при номинальном токе IH,
;PКH
– при номинальном токе IH,
 ,
, .
Задаваясь(коэф-ент
нагрузки) = 0,25; 0,5; 0.75; 1.0; 1.25 при
.
Задаваясь(коэф-ент
нагрузки) = 0,25; 0,5; 0.75; 1.0; 1.25 при 
cos2 = const построим зависимость = f()
Максимумы наступает тогда, когда потери в стали равны потерям в меди
p0 = 2pКН , откуда
Uн
Iн


Параллельная работа трансформаторов
Условия:
Напряжения первичных и вторичных обмоток тр-ов должны быть одинаковыми, т.е.
KI = KII = KIII = …
Напряжения короткого замыкания параллельно работающих тра-ов должны быть одинаковыми, т.е. UKI = UKII = UKIII
Группы соединения параллельно работающих трансформаторов должны быть одинаковыми. Кроме того, мощность параллельно работающих трансформаторов не должна отличаться более чем в три раза.
Параллельная работа трансформаторов при неравенстве коэффициентов трансформации.
При
равенстве KI
= KII
вторичные ЭДС Е2I
и Е2II
равны и по контуру направлены встречно
и их сумма равна 0 т.е. при этом не будет
никаких уравнительных токов. Теперь
пусть KI
< KII
т.е. E2I
> E2II
(U2I
> U2II).
В этом случае при холостом ходе сумма
напряжений по контуру не равна нулю, а
значит будет уравнительный ток. Появится
 ,
, .
Учтем для простоты только индуктивные
сопротивления, т.к. активные малы, тогда
.
Учтем для простоты только индуктивные
сопротивления, т.к. активные малы, тогда ,
,
создает в обмотках потоки, которые
создают ЭДС которые выравнивают
напряжение до U2
на шинах.
создает в обмотках потоки, которые
создают ЭДС которые выравнивают
напряжение до U2
на шинах.
Уравнительный
ток будет существовать и при нагрузке.
Он будет для каждого тр-ра складываться
с нагрузочным током геометрически. Из
диограммы видно, что в том тр-ре, где кI
меньше (напряжение больше) тр-р перегружен
наоборот. Т.е. получается, что первый
тр-р перегружен, а второй недогружен.
Для того, чтобы разница в нагрузке была
в допустимых пределах, часто предусматривают,
чтобы разница в коэффициентах трансформации
была не более 0,5% от их среднего значения.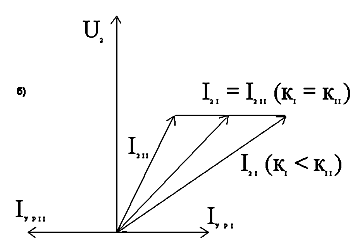
 ,
где
,
где

среднее геометрическое.
среднее геометрическое.
Если трансформатор меньшей мощности включается в парал-ую работу, то он должен иметь больший коэффициент трансформации.
3.Группы соединения трансформаторов.
Группой соединения тр-ра называется угол сдвига между линейными ЭДС первичной и вторичной обмоток тр-ра. За первичную обмотку принимают обмотку высокого напряжения. Для определения угла сдвига линейных ЭДС обмоток следует умножить номер группы на 30°.
Группа соединения зависит от:
от направления намотки;
маркировки концов обмотки;
схемы соединения обмоток.
Стандартными являются две группы соединений — 12 и 11:
1)
соединение
![]() /;
2)
соединение
/;
2)
соединение
![]() /
/![]() .
.
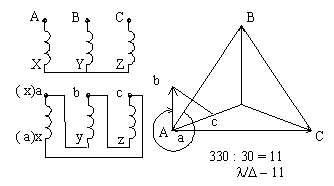

Группы соединения необходимо знать для включения тр-ров на параллельную работу. При различных группах соединений параллельно работающих тр-ров между векторами их вторичных напряжений будет сдвиг фаз, вызывающий уравнительные токи между обмотками тр-ров. При разных группах соединений, при самом малом сдвиге фаз, равном 30°, уравнительный ток превышает номинальный ток тр-ра в 5 раз, при самом большом сдвиге 180° — в 20 раз.
Возьмем для примера 12 и 11 группу
E
= 2E2Isin15
= 0,52E2I,
тогда
 ,
что составляет 26% от установившегося
тока короткого замыкания, что примерно
в 3-5 раз превысит номинальный ток.
Поэтому параллельная работа тр-ров с
различными группами соединения
недопустима.
,
что составляет 26% от установившегося
тока короткого замыкания, что примерно
в 3-5 раз превысит номинальный ток.
Поэтому параллельная работа тр-ров с
различными группами соединения
недопустима.
Моменты асинхронного двигателя.

М - электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0 .
Кривая
М=f(s),
ее физический смысл .
Зависимость M
= f(S)
.
Зависимость M
= f(S)
1.Область
от S = 0
Sкр.
При малом скольжении X2S
0, тогда ток в роторе
 активному току, с увеличением S
активному току, с увеличением S

 M.
Момент зависит от потока и активной
составляющей тока в роторе
M.
Момент зависит от потока и активной
составляющей тока в роторе
 .
В области Mmax
начинает проявляться индуктивное
сопротивление X2S.
.
В области Mmax
начинает проявляться индуктивное
сопротивление X2S.
2.Область
скольжений S = Sкр
1. В этой области с увеличением скольжения
S увеличивается индуктивное сопротивление
ротора X2S
= X2S
за счет которого увеличивается угол 2
между ЭДС
 и током (см. рис. 117), активная составляющая
при этом уменьшается, а следовательно
уменьшается и момент, т.е. S
X2S
и током (см. рис. 117), активная составляющая
при этом уменьшается, а следовательно
уменьшается и момент, т.е. S
X2S

 M.
при S = 1 равен пусковому, который в 57
раз больше номинального. При S = 0 ток I1
0, т.к. при S = 0 двигателем потребляется
реактивная мощность для создания
вращающего поля, кроме того, двигателем
потребляется активная мощность на
покрытие потерь в статоре. При S = 0 ток
ротора
M.
при S = 1 равен пусковому, который в 57
раз больше номинального. При S = 0 ток I1
0, т.к. при S = 0 двигателем потребляется
реактивная мощность для создания
вращающего поля, кроме того, двигателем
потребляется активная мощность на
покрытие потерь в статоре. При S = 0 ток
ротора
 ,
т.к.
,
т.к. Кривая зависимости M = f(S) характеризуется
тремя моментами: а) Пусковой момент Мп
при S = 1 . б) Максимальный момент Мmax
Sкр
. в) Номинальный момент МН
SН.
Отношение
максимального (критического) момента
к номинальному, называется перегрузочной
способностью
Кривая зависимости M = f(S) характеризуется
тремя моментами: а) Пусковой момент Мп
при S = 1 . б) Максимальный момент Мmax
Sкр
. в) Номинальный момент МН
SН.
Отношение
максимального (критического) момента
к номинальному, называется перегрузочной
способностью
 .Расчетная
формула:
.Расчетная
формула:
 ,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.Максимальный
критический момент МКР: критическое
скольжение - Sкр
соответствующего максимальному
моменту
,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.Максимальный
критический момент МКР: критическое
скольжение - Sкр
соответствующего максимальному
моменту
 ,
максимальный момент
,
максимальный момент .
Знак+
-
соответствует двигательному режиму .
Знак -
- соответствует генераторному режиму.
Из выражения Мкр
видно, что величина максимального
момента не зависит от активного
сопротивления роторной цепи, но сильно
оно влияет на его расположение. Если
сопротивление роторной цепи увеличивать
, то увеличивается Sкр
и кривая момента смещается вправо
.
Знак+
-
соответствует двигательному режиму .
Знак -
- соответствует генераторному режиму.
Из выражения Мкр
видно, что величина максимального
момента не зависит от активного
сопротивления роторной цепи, но сильно
оно влияет на его расположение. Если
сопротивление роторной цепи увеличивать
, то увеличивается Sкр
и кривая момента смещается вправо
 ,
, .
Как видно из кривых, чем больше активное
сопротивление в роторной цепи, тем
больше пусковой момент и меньше пусковой
ток. Это ценное свойство используется
в двигателях с фазным ротором.
.
Как видно из кривых, чем больше активное
сопротивление в роторной цепи, тем
больше пусковой момент и меньше пусковой
ток. Это ценное свойство используется
в двигателях с фазным ротором.