

28. Регуляторы суим.
1. Аналоговые регуляторы класса “вход-выход” на основе операционных усилителей
Независимо от технологического назначения регуляторов все они подразделяются на 2 больших класса:
- параметрические регуляторы класса «вход/выход» (П- , ПИ-, ПИД- и т. п. регуляторы );
- регуляторы состояния САУ (апериодические, модальные и т.п.).
Первый класс регуляторов на функциональных схемах СУ ЭП обозначается в виде переходной функции.
1. Пропорциональный регулятор (П-регулятор).
 Принципиальная схема регулятора
приведена на рис. 4.19.
Принципиальная схема регулятора
приведена на рис. 4.19.
Будем полагать, что на входе регулятора - сигнал ошибки регулирования Хвх , причемХвх =Хз-Хос. При этом вместо двух резисторовRЗиRос используется один -Rвх .
Передаточная функция регулятора
![]() Временная
характеристика регулятора:
Временная
характеристика регулятора:
Увых(t)=КрегХвх(t).
 2. Интегральный регулятор
(И-регулятор).
2. Интегральный регулятор
(И-регулятор).
 Принципиальная
схема регулятора приведена на рис. 4.22.
Принципиальная
схема регулятора приведена на рис. 4.22.
Рис. 4.22. Принципиальная электрическая схема интегрального регулятора
Передаточная функция регулятора
![]() (4.50)
(4.50)
где TИ- постоянная времени интегратора,TИ =RВХС0.
Временная характеристика регулятора:
Увых(t)= Увых(0)+1/( RВХС0)Хвх(t)t.
П ереходный
процесс в регуляторе при нулевых
начальных условиях (Увых(0)=0)
будет иметь вид, изображенный на рис.
4.23.
ереходный
процесс в регуляторе при нулевых
начальных условиях (Увых(0)=0)
будет иметь вид, изображенный на рис.
4.23.
Функциональная схема интегрального регулятора приведена на рис. 4.24.
 3. Дифференциальный регулятор
(Д-регулятор).
3. Дифференциальный регулятор
(Д-регулятор).
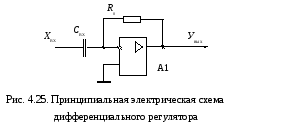 Принципиальная
схема регулятора приведена на рис. 4.25.
Принципиальная
схема регулятора приведена на рис. 4.25.
Передаточная функция регулятора
![]() (4.51)
(4.51)
где TД- постоянная времени интегратора,TД =R0СВХ.
Временная характеристика регулятора:
Увых(t)=TД(t),
где (t) - дельта-функция Дирака.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.26.
С ледует
отметить, что ограниченная полоса
пропускания частот самих операционных
усилителей не позволяет реализовать
чистое (идеальное) дифференцирование.
Кроме того, в силу низкой помехозащищенности
дифференциальных регуляторов сложилась
практика применения реальных
дифференцирующих звеньев и принципиальные
схемы таких регуляторов несколько
отличаются от приведенной на рис. 4. 25.
ледует
отметить, что ограниченная полоса
пропускания частот самих операционных
усилителей не позволяет реализовать
чистое (идеальное) дифференцирование.
Кроме того, в силу низкой помехозащищенности
дифференциальных регуляторов сложилась
практика применения реальных
дифференцирующих звеньев и принципиальные
схемы таких регуляторов несколько
отличаются от приведенной на рис. 4. 25.
Функциональная схема дифференциального регулятора приведена на рис. 4.27.

4. Пропорционально-интегральный регулятор (ПИ-регулятор).
 4.
Пропорционально-интегральный регулятор
(ПИ-регулятор).
4.
Пропорционально-интегральный регулятор
(ПИ-регулятор).
Принципиальная схема регулятора приведена на рис. 4.28.
Передаточная функция регулятора
![]() (4.52)
(4.52)
где KРЕГ- коэффициент передачи регулятора,KРЕГ =R0/RВХ;
TИ- постоянная времени интегратора,TИ =RВХС0.
Временная характеристика регулятора:
Увых(t)= Увых(0) + ( KРЕГ + t/( RВХС0))Хвх(t).
Переходный процесс в регуляторе при нулевых начальных условиях будет иметь вид, изображенный на рис. 4.29.


Передаточную функцию пропорционально-интегрального регулятора часто представляют не в виде суммы двух слагаемых, а в виде так называемого изодромного звена
![]() , (4.53)
, (4.53)
где TИЗ- постоянная времени изодромного звена,TИЗ=R0C0,
TИ- постоянная времени интегрирования регулятора,TИ=RВХC0 .
ПИ-регулятор, включенный в структуру САУ, обеспечивает компенсацию одной большой постоянной времени объекта управления (см. раздел 8.1).
Пропорционально-дифференциальный регулятор (ПД-регулятор) Принципиальная схема регулятора приведена на рис. 4.31.

Передаточная функция регулятора
![]() (4.54)
(4.54)
где KРЕГ - коэффициент передачи регулятора,KРЕГ =R0/RВХ;
TД- постоянная времени интегратора,TД =R0СВХ.
Временная характеристика регулятора:
Увых(t)= KРЕГ Xвх(t) +TД(t),
где (t) - дельта-функция Дирака.
П ереходный
процесс в ПД- регуляторе будет иметь
вид, изображенный на рис. 4.32, функциональная
схема регулятора приведена на рис. 4.33.
ереходный
процесс в ПД- регуляторе будет иметь
вид, изображенный на рис. 4.32, функциональная
схема регулятора приведена на рис. 4.33.
Рис. 4.32. Переходный процесс в ПД- регуляторе

6. Пропорционально-интегрально-дифференциальный регулятор (ПИД-
регулятор)
 Принципиальная
схема регулятора приведена на рис. 4.34.
Принципиальная
схема регулятора приведена на рис. 4.34.
Передаточная функция регулятора
 (4.55)
(4.55)
где KРЕГ - коэффициент передачи регулятора,KРЕГ =R0/RВХ +CВХ/С0;
TИ- постоянная времени интегрирования,TИ =RВХС0;
TД- постоянная времени дифференцирования,TД =R0СВХ.
Временная характеристика регулятора:
Увых(t)= Увых(0) +KРЕГ Xвх(t) + (1/TИP) Xвх(t) + TД(t),
где (t) - дельта-функция Дирака.
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.35, функциональная схема приведена на рис. 4.36.


По аналогии с ПИ-регулятором ММ ПИД-регулятора часто представляют в виде изодромного звена второго порядка
![]() , (4.56)
, (4.56)
где ТИЗ,1 , ТИЗ,2 - постоянные времени изодромного звена;ТИЗ,1 = R0С0 , ТИЗ,2 = =RвхСвх.
ПИД-регулятор обеспечивает компенсацию двух больших постоянных времени объекта управления, обеспечивая интенсивность динамических процессов в САУ.