

Лекция 7 Преобразователь координат
Существуют три типа преобразователей координат:
1.
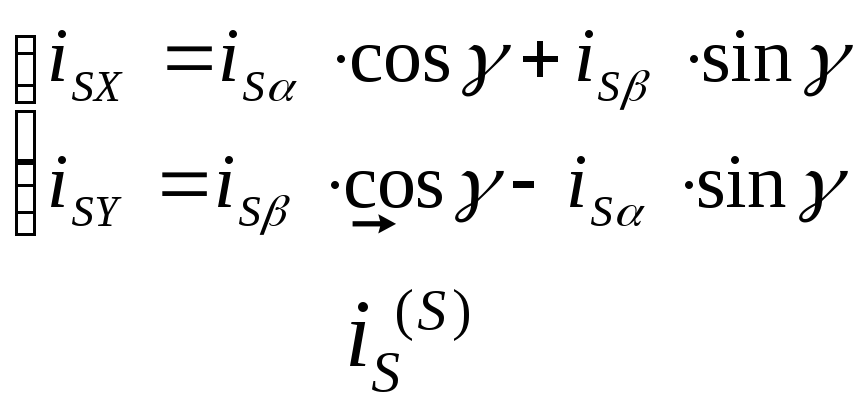
Преобразователь координат тока, который
преобразует фазные значения токов в
значение токов
![]() :
:

Преобразователь координат напряжения. Обратная операция.

Преобразователь координат потокосцепления. Двукратное преобразование координат.

Преобразователь координат используется для перехода из 3-х фазной системы в 2-х фазную неподвижную и обратно (прямое и обратное преобразование координат). В ПКП при переходе от фазных значений к главному потокосцеплению статора к потокосцеплению ротора. Вводится два сигнала составляющих токов по осям и. Для этого используется формулы прямого и обратного преобразования.

![]() - совместили оси
- совместили оси
![]()
![]()
![]()
![]()
![]()



Блок координатного индикатора
Используется для определения угла между системами координат неподвижной и вращающейся. Для этого используются сигналы потокосцепления ротора.

![]()
![]()
![]()
В системе «Трансвектор» определение угла между системами координат осуществляется с помощью датчика Холла или специальных измерительных обмоток, расположенных в расточке статора. В системе используется устройство поворота векторов или преобразователи координат, осуществляющие перевод из неподвижной системы во вращающуюся и обратно.
Устройство поворота векторов тока и наряжения.

Блок развязки
Осуществляет техническую линеаризацию системы, где происходит
- Компенсация внутренних перекрестных связей;
- Компенсация внутренних связей по ЭДС;
- Компенсация статических нелинейностей.

Введем
обозначения![]()
Получим
![]()
![]()
![]()
![]()
Эп серии «Эратон»

ЭП работает непосредственно по системе преобразователя частоты с прямым векторным управлением.
Диапазон регулирования частоты
040 Гц при нагрузке![]() от
от![]() .
.
4045 Гц при нагрузке![]()
Преобразователи этой серии работают на двигателях общепромышленной серии с 6-ти выводными каналами, где каждая фазная обмотка питается отдельно.
«Эратон»

Для питания каждой из обмотки используется два реверсивных преобразователя частоты с раздельным управлением.
3 6тиристоров
6тиристоров
«Эратон М»
Соединение двигателя в используется 3-х фазный реверсивный преобразователь собранный по нулевой схеме.

18 тиристоров
Функциональная схема системы управления ЭП «Эратон»

Условные обозначения
ВП – блок вычисления потока;
ВЕ – блок вычисления ЭДС;
ФГС – формирователь гармонических сигналов;
УУПЧ – устройство управления преобразователем частоты;
СЛ – система линеаризации;
СУ – система управления;
РП – регулятор потокосцепления;
Работа схема ЭП «Эратон»
Система управления ЭП «Эратон» включает в себя 3 блока
блок системы управления (СИФУ) для управления тиристорными НПЧ;
блок системы линеаризации, осуществляет техническую линеаризацию системы;
блок системы управления ЭП, который реализует прямое векторное управление АМ.
Система управления ЭП включает два замкнутых контура регулирования составляющих тока статора по осям хиу. Задающие сигналы поступают с регулятора скорости и регулятора потокосцепления.
В системе используется преобразователи координат осуществляющие прямое и обратное преобразование из неподвижной во вращающуюся и обратно. В системе отсутствуют датчики скорости и магнитного потока. Вычисление скорости и магнитного потока.
Осуществляется при помощи блоков вычисления ВП и ВЕ. Угол между системами координат определяется в замкнутой системе регулирования, включающей преобразователь координат ПК6, регулятор потока РП («ПИ»-регулятор) и ФГС. В замкнутой системе осуществляется коррекция угла с использованием разницы проекций потокосцепление машины на ось 0х . В системе используется БРТ, входящих в систему управления, а так же система линеаризации. Для симметричного управления фазами двигателя используется переключающее устройство в состав которого входит коммутатор с системой датчиков, блок регуляторов тока и устройство выборки и хранения. (УВХ).
С Л
Л
Условные обозначения.
ФУС – формирователь управляющих сигналов;
F1и F2– осуществляют переключение датчика тока и ЭДС;
Импульс выборки – длительность управления каждой из фаз.
Блок регулятора тока (БРТ) в системе линеаризации.
БРТ одноканальный с П –регулятором тока и с переключением системы на область работы прерывистого тока и непрерывным.

Условные обозначения.
ПВ – позиционный выпрямитель;
НЗ1 и НЗ2 – нелинейные звенья 1 и 2;
0 – ограничитель;
- сумматор.
О дноканальный
блок РТ осуществляет регулирование
каждой из фаз двигателя, при помощи
коммутатора, который переключает
регулятор с управляющим сигналом выборки
и хранения и осуществляет регулирование
токов фаз двигателя. На время регулирования
тока одной из фаз, 2-е другие фазы
управляются предыдущими сигналами,
заполненными УВХ. Для компенсации
инерционности обмоток фаз используется
«П» регулятор тока с компенсацией ЭДС
двигателя.
дноканальный
блок РТ осуществляет регулирование
каждой из фаз двигателя, при помощи
коммутатора, который переключает
регулятор с управляющим сигналом выборки
и хранения и осуществляет регулирование
токов фаз двигателя. На время регулирования
тока одной из фаз, 2-е другие фазы
управляются предыдущими сигналами,
заполненными УВХ. Для компенсации
инерционности обмоток фаз используется
«П» регулятор тока с компенсацией ЭДС
двигателя.