

Лекция №3 ам в системе координат (X,y,0)
(система ориентирована по полю)
Преобразованная система уравнений АМ в осях (U,V,0) выражается через ток статора и потокосцепление ротора.



![]()

Для определения вектора Isмы должны знать
 .
.Для определения вектора
 мы должны знать
мы должны знать
В произвольной системе координат для
уравнения АМ необходимо знать
пространственное положение вектора Isи![]() ,
определение их положение через
составляющиеIsи
,
определение их положение через
составляющиеIsи![]() ,
определяют режим работы АМ, так же
необходимо знать угол междуIsи
,
определяют режим работы АМ, так же
необходимо знать угол междуIsи![]() ,
в установившемся режиме работы он
постоянен, а в переходных процессах он
варьируется.
,
в установившемся режиме работы он
постоянен, а в переходных процессах он
варьируется.
В установившемся режиме:
![]()
В переходных режимах
![]()
Варианты упрощения управления АМ:
Система координат ориентированна по полю.
С тараются
поддерживать
тараются
поддерживать![]() .
В системе координат ориентированных
по полю
.
В системе координат ориентированных
по полю![]() совмещаются с одной из осей и скорость
вращения координат равна синхронной
скорости. Для определения режима работы
АМ определяю пространственное положение
вектора тока статора через его проекции
и задаются значениями потокосцепление
ротора, т.о. для управления АМ необходимо
знать три координаты
совмещаются с одной из осей и скорость
вращения координат равна синхронной
скорости. Для определения режима работы
АМ определяю пространственное положение
вектора тока статора через его проекции
и задаются значениями потокосцепление
ротора, т.о. для управления АМ необходимо
знать три координаты![]() и
и![]() .
.
Система ориентированная по току.
Д ля
определения положения необходимо знать
ля
определения положения необходимо знать![]() и
и![]() .
Система ориентированная по току
используется в основном в системах
управления синхронными машинами, в
которых можно измерить
.
Система ориентированная по току
используется в основном в системах
управления синхронными машинами, в
которых можно измерить![]() ,
а используя данные обмотки возбуждения
составляющие магнитный поток по
продольной или поперечной оси.
,
а используя данные обмотки возбуждения
составляющие магнитный поток по
продольной или поперечной оси.
Управление АМ в полярных координатах.
В полярной систем координат для управления
АМ необходимо знать
полярной систем координат для управления
АМ необходимо знать![]() и его аргумент или угол между векторомIsи
и его аргумент или угол между векторомIsи![]() во вращающихся системах координат.
во вращающихся системах координат.![]() иQ-?
иQ-?
Для определения Qидут на построение системы косвенного определения угла.
![]() ,
где
,
где![]() скорость
вращения ротора,
скорость
вращения ротора,![]() -
разность скоростей. Т.к.
-
разность скоростей. Т.к.![]() определяется косвенно, то
определяется косвенно, то![]() ,
где
,
где![]() - производная аргумента. Установившийся
режим
- производная аргумента. Установившийся
режим![]() .
В полярной системе координат режим
работы определяется точкой на координатной
плоскости, положение этой точки
перемещается по модулю тока статора
.
В полярной системе координат режим
работы определяется точкой на координатной
плоскости, положение этой точки
перемещается по модулю тока статора![]() и относительно несущего вектора –
вектора ротораR. В
установившемся режиме вектора тока и
магнитного потока вращаются синхронно,
поэтому скорость вращения определяется
как сумма скорости ротора и абсолютного
скольжения вектора потокосцепления.
Определение углаQпрактически невозможно, поэтому его
определяют косвенным путем.
и относительно несущего вектора –
вектора ротораR. В
установившемся режиме вектора тока и
магнитного потока вращаются синхронно,
поэтому скорость вращения определяется
как сумма скорости ротора и абсолютного
скольжения вектора потокосцепления.
Определение углаQпрактически невозможно, поэтому его
определяют косвенным путем.
Система ориентированна по полю в осях (х, у, о).

 Подставляем в и получим:
Подставляем в и получим:
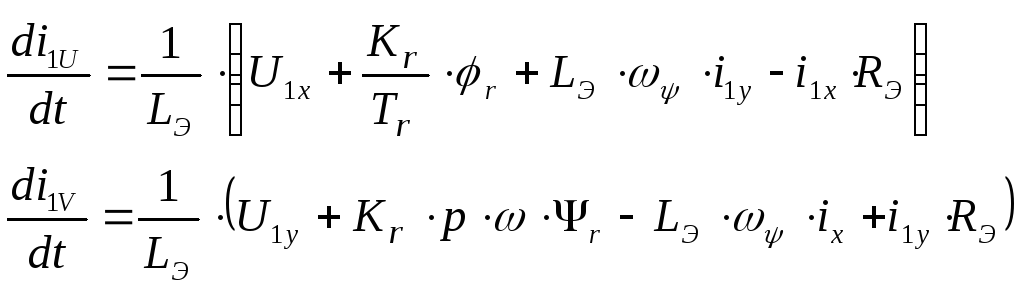
![]()
Полученная
система уравнений определяет через
составляющие тока статора значения М
и Ф АМ. По аналогии с МПТ составляющая
![]() по осиyпропорциональна
э/м моменту
по осиyпропорциональна
э/м моменту![]() ,
а величина
,
а величина![]() .
Поэтому задача управления АМ сводится
к управлению составляющими тока по осямxиy.
.
Поэтому задача управления АМ сводится
к управлению составляющими тока по осямxиy.
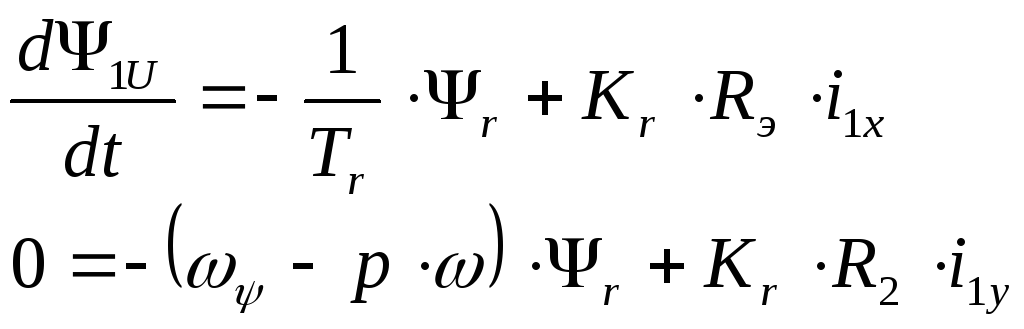
![]() (2)
(2)
Для
установившегося режима
![]() :
:
![]() (3)
(3)
Также
для управления необходимо знать
![]()
![]()
![]() (4)
(4)
![]()
![]()
![]()
Используя
математическое описание АМ в осях
(x,y,0) в
системе ориентированной по полю можно
получить несколько систем управления
в фазных координатах, где управление
осуществляется составляющими тока по
осям или в полярных координат, где
управление осуществляется![]() .
.