

5.2. Типовые динамические звенья и структурные схемы сау
Для наглядного представления структуры сложной динамической системы управления как совокупности элементов и связей между ними применяют структурные схемы и графы. Структурные схемы, как и сигнальные графы, представляют собой графическое изображение структуры САУ. Элементы структурной схемы САУ представляют в виде типовых динамических звеньев, характеризующихся однонаправленностью, одним входом и одним выходом, что позволяет применить для их описания аппарат передаточных функций. Если реальное динамическое звено не обладает однонаправленностью, т. е. выход оказывает влияние на вход, то такой элемент представляют в виде направленного звена с обратной связью. Если у элемента несколько входов, в его структуру включают суммирующие звенья (сумматоры) – специфические многовходовые безынерционные звенья с единичными коэффициентами передачи по каждому входу, причем каждый вход сумматора обозначается знаковой функцией (+ или –). Если у элемента несколько выходов, это означает, что его нельзя рассматривать как элементарное звено и к нему необходимо применить декомпозицию, выделив соответствующие числу выходов звенья.
На структурных схемахдинамические звенья изображают прямоугольниками, входные и выходные воздействия - подходящими и отходящими от прямоугольников стрелками и текстовыми надписями, обозначающими формальный их вид. Внутри прямоугольников вводят обозначения передаточных функций звеньев. Сумматоры сигналов (переменных САУ), как правило, обозначают окружностями, сами сигналы - подходящими к окружностям стрелками с указанием имен переменных и знаков алгебраического суммирования (+ или –). Следует отметить, что в технической литературе, компьютерных системах автоматизированного проектирования и управления, системах сопровождения жизненного цикла САУ (САПР, АСУ ТП,CAD/CAM,SCADA,CALS) встречается множество графических обозначений сумматоров сигналов, однако в силу своей простоты все они интуитивно понятны.
В обобщенной форме структурная схема динамического звена приведена на рис. 5.3.

Рис. 5.3. Обобщенная структурная схема динамического звена
Типовые элементарные динамические звенья,их реакции на единичные ступенчатое и импульсное воздействия приведены в табл. 5.2.
В качестве примера составления структурных схемдинамических объектов управления рассмотрим электродвигатель постоянного тока, регулируемый по цепям якоря и возбуждения [3, 18]. Функциональная схема и схемы замещения электродвигателя приведены на рис. 5.4.
В структуре электродвигателя можно выделить три основных цепи (см. рис. 5.4б, 5.4в, 5.4г):
- цепь якоря, питаемая регулируемым напряжением Uя;Rэ,Lэ– соответственно эквивалентное активное сопротивление и эквивалентная индуктивность якорной обмотки;Eд– э.д.с. электродвигателя;iя– ток якоря;
- цепь возбуждения, питаемая регулируемым напряжением Uв;Rв,Lв– соответственно эквивалентное активное сопротивление и эквивалентная индуктивность обмотки возбуждения;iв– ток возбуждения;
- электромеханическая цепь, обеспечивающая
преобразование электромагнитной энергии
в механическую энергию вращения вала
ротора; Jд–
приведенный к валу двигателя момент
инерции электродвигателя и вращаемого
механизма;M,Mc– соответственно электромагнитный
момент электродвигателя и момент
сопротивления на его валу;
![]() - скорость вращения вала двигателя.
- скорость вращения вала двигателя.
Таблица 5.2
|
Название звена и его передаточная функция W(p) |
Переходный процесс h(t) |
Импульсный переходный процесс w(t) |
|
1. Масштабирующее (безынерционное) звено
W(p) = k
|
0 t |
0 t |
|
2. Интегрирующее звено
|
0 t |
0 t |
|
3. Идеальное дифференцирующее звено
W(p) = kp
|
0 t |
0 t |
|
4. Реальное дифференцирующее звено
|
0 t |
0 t |
|
5. Апериодическое звено
|
k
0 T t |
0 T t |
|
6. Колебательное звено
|
h(t)
k
0 t |
w(t)
0 t |
|
7
|
0 t |
0 t |
 h(t)
h(t) w(t)
w(t) h(t)
h(t) w(t)
w(t) h(t)
h(t) w(t)
w(t) h(t)
h(t) w(t)
w(t) h(t)
h(t) w(t)
w(t)

 h(t)
h(t) w(t)
w(t)
Для описания динамических моделей электрических цепей электродвигателя воспользуемся законами Кирхгофа, а для описания механической цепи – 2-м законом Ньютона. Тогда получим:
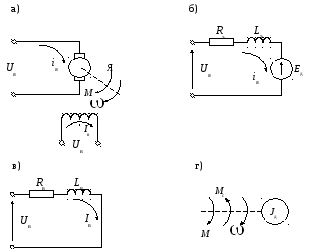
Рис. 5.4. Функциональная схема (а) и схемы замещения (б-г)
электродвигателя постоянного тока
![]()
 ,
,
![]() , (5.9)
, (5.9)
![]() ,
,
где ![]() ,
,![]() - электромагнитные постоянные времени
соответственно обмотки якоря и обмотки
возбуждения,
- электромагнитные постоянные времени
соответственно обмотки якоря и обмотки
возбуждения,![]() ,
,![]() .
.
Электромагнитные цепи двигателя
взаимосвязаны. При подаче напряжения
![]() по цепи якоря протекает ток
по цепи якоря протекает ток![]() ,
создающий электромагнитный момент,
вращающий ротор, т. е.
,
создающий электромагнитный момент,
вращающий ротор, т. е.
![]() ,
(5.10)
,
(5.10)
где ![]() - конструктивная постоянная двигателя.
- конструктивная постоянная двигателя.
Ток, протекающий по обмотке возбуждения, создает магнитный поток Ф, пронизывающий обмотку якоря и наводящий в ней э.д.с. вращения, т. е.
![]() ,
(5.11)
,
(5.11)
где ![]() - конструктивная постоянная двигателя,
в системе СИ равная по величине
- конструктивная постоянная двигателя,
в системе СИ равная по величине![]() .
.
Анализируя выражения (5.10), (5.11), заметим,
что произведение переменных приводит
к нелинейности математической модели
электродвигателя, регулируемого
одновременно по цепям якоря и возбуждения.
Полагая, что электродвигатель регулируется
только по цепи якоря (напряжение
возбуждения
![]() ,
,![]() ),
математическая модель электродвигателя
примет вид линейной модели 2-го порядка
),
математическая модель электродвигателя
примет вид линейной модели 2-го порядка
![]()
 , (5.12)
, (5.12)
![]() .
.
Для перехода от дифференциальных
уравнений (5.12) к операторным уравнениям
произведем замену
![]() .
Тогда получим
.
Тогда получим
![]()
 , (5.13)
, (5.13)
![]() .
.
По операторным уравнениям (5.13) составим структурную схему электродвигателя, приведенную на рис. 5.5.

Рис. 5.5. Структурная схема электродвигателя,
регулируемого по цепи якоря
Как видим, структурная схема электродвигателя содержит 4 типовых линейных динамических звена: апериодическое, интегрирующее и 2 безынерционных звена, а также 2 суммирующих элемента.