

Механические и электромеханические характеристики двигателей постоянного тока.
Область применения.
Двигатели постоянного тока подразделяют на двигатели с независимым, последовательным и смешанным возбуждением. Двигатели с независимым возбуждением применяют, как правило, для длительного режима работы, когда требуется широкое регулирование скорости вращения станочного электропривода трубопроката, листо-прокатных станов и т.д. Эти двигатели реже применяются в режиме повторно кратковременной нагрузки, где требуется устойчивая постоянная и полная скорость. Двигатели постоянного тока с независимым возбуждением (ДПТ НВ) широко применяют в системе регулирования генератора-двигателя, в системе ТПД, в системе ШИР-Д (широко-импульсное регулирование-двигатель).
Двигатель последовательного возбуждения применяют для вспомогательных механизмов прокатных станов, для подъемных кранов на приводах хода моста и хода тележки. При их применении на кранах, уменьшается число троллей.
ДПТ ПВ широко используют на транспорте. Постоянный ток здесь удобен тем, что при нем достаточно иметь один троллей, а последовательное возбуждение по той причине, что двигатель при этом не боится больших снижений напряжения, которые имеют место при питании троллем на большие расстояния и лучше выдерживает перегрузку на подъемах и спусках, благодаря тому, что с увеличением тока растет момент.
Двигатель с последовательным возбуждением надежнее, чем другие двигатели постоянного тока, потому что у него обмотка возбуждения выполнена проводом большего сечения, и обмотка возбуждения имеет ничтожно малое напряжение между витками.
Двигатель со смешанным возбуждением применяется редко, работает в механизмах с циклической нагрузкой. Как правило используется динамическое торможение на остановке, работает с большей частотой включения, при которой требуется принудительное охлаждение воздухом продуваемого через двигатель.
Механические и электромеханические характеристики.
ДПТ НВ:
При рассмотрении механических характеристик двигателя считают, что источник питания или сеть бесконечной мощности, ее внутреннее сопротивление близко к нулю, напряжение сети неизменно Uс=const.
Поэтому цепи возбуждения и якоря не зависят друг от друга. Не зависят эти цепи друг от друга и потому, что во многих системах привода для обмотки возбуждения используется отдельный источник питания.
Схема двигателя постоянного тока с независимым возбуждением следующая:
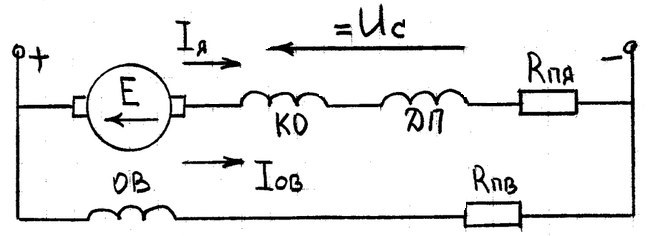
КО – компенсационная обмотка;
ДП – обмотка дополнительных полюсов;
rпя– дополнительное сопротивление, включенное последовательно с якорем;
rпв– дополнительное сопротивление, включенное последовательно с обмоткой возбуждения.
Uся=Е+Iя(rя+rпя)– для якоря;
Uc=Iов(rов+rпв) –для обмотки возбуждения;
Е=КФw;![]() ;
;
Ф – магнитный поток;
w– угловая скорость;
К – конструкторский коэффициент;
Р – число пар полюсов;
N– число активной проводимости релейной ветви;
а – число параллельных ветвей обмоток якоря.
Uся=КФw+Iя(rя+rпя);
![]() - уравнение для скорости двигателя;
- уравнение для скорости двигателя;
Связь между моментом и током М = КФIя
![]() .
.
Уравнение
характеристики представляет из себя
прямую линию, которой отсекают от оси
ординат отрезок
![]() ,w0– скорость
идеального холостого хода.
,w0– скорость
идеального холостого хода.
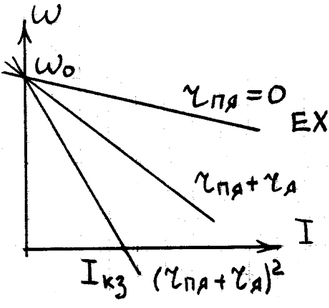
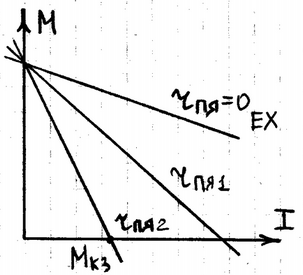
Из выражения механических и электромеханических характеристик видно, что при Ф=constэлектромеханические и механические характеристики представляют собой прямую линию пересекающую ось координат.
![]() ;
;![]()
Из графических выражений характеристику можно выразить следующим образом:
![]() ;
;![]()
Варьируя величинами Uс, rпя, Ф,можно получить семейство кривых, в этих семействах сложно выделить естественную и искусственную электромеханические и механические характеристики. Под естественной понимают характеристику, когдаUс=Uн, Ф=Фн, rпя=0. Все остальные характеристики искусственные.