

6.2. Уравновешивание роторов
Ротор – это вращающееся звено, установленное в неподвижных опорах. Примерами роторов являются коленчатые валы двигателей внутреннего сгорания и дизелей, распределительные валы, роторы электродвигателей, турбин, колеса транспортных средств и т.п.
6.2.1. Уравновешивание роторов при известном расположении неуравновешенных масс
Данная задача возникает и решается на этапе проектирования ротора. На рис. 6.2а изображен некоторый вал, на котором расположены две неуравновешенные массы. На данном примере легко пояснить физический смысл статической неуравновешенности, который состоит в том, что центры масс деталей, установленных на роторе смещены, относительно оси вращения и, как следствие, центр масс всего ротора тоже может быть смещен относительно этой оси. Таким образом, задачей статического уравновешивания в данном случае будет расчет и установка противовеса, так, чтобы центр масс всего ротора оказался на оси его вращения.
На
рис. 6.2б
представлена расчетная схема, где m1,
m2
– величины
неуравновешенных масс, r1,
r2
– радиусы
расположения центров масс деталей,
установленных на роторе. Вид с торца
вала на систему показан на рис. 6.2в.
Поскольку конструкция ротора известна,
то значения m1,
m2,
r1,
r2
могут быть рассчитаны, и мы их полагаем
известными.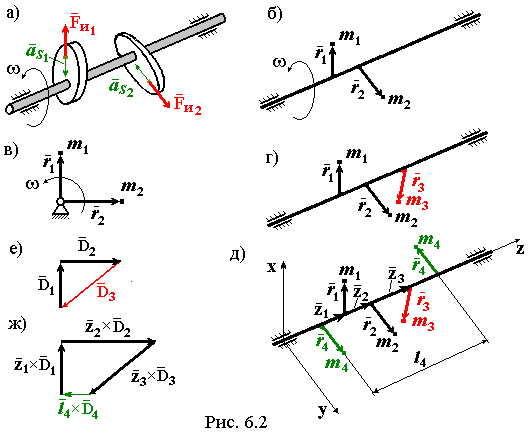
Статическое уравновешивание. Исходным условием статической уравновешенности является равенство нулю суммы всех сил инерции:

( 6.2 )
Из этого условия, полагая, что ротор вращается равномерно, получаем:
Произведение
mi массы
на радиус-вектор в теоретической механике
называют статическим моментом массы,
отсюда и название статическое
уравновешивание.
В инженерной практике для этого
произведения укоренился другой термин:
дисбаланс.
Таким образом, окончательно условие
статической уравновешенности получаем
в виде равенства нулю суммы дисбалансов
масс:
массы
на радиус-вектор в теоретической механике
называют статическим моментом массы,
отсюда и название статическое
уравновешивание.
В инженерной практике для этого
произведения укоренился другой термин:
дисбаланс.
Таким образом, окончательно условие
статической уравновешенности получаем
в виде равенства нулю суммы дисбалансов
масс:

( 6.3 )
Собственно,
статическое уравновешивание производится
установкой противовеса. Для расчета
его параметров построим план дисбалансов
(см. рис. 6.2е). Замыкая контур, получаем
вектор
характеризующий параметры противовеса. Конкретное сочетание значений m3,r3, обеспечивающее нужный дисбаланс подбирается конструктивно. На рис. 6.2г изображён ротор с установленным противовесом, статически уравновешивающим ротор.
Моментное уравновешивание. Исходным условием моментной уравновешенности является равенство нулю суммы моментов всех сил инерции.

( 6.4 )
Введем
систему координат XYZ
(см. рис. 6.2д). Моменты сил инерции будем
брать относительно начала координат
этой системы:
Таким образом, окончательно условие моментной уравновешенности получаем в виде:

( 6.5 )
Установка
еще одного противовеса вызовет нарушение
статической балансировка. Поэтому
поступают следующим образом. Из
конструктивных соображений выбирают
длину l4и строят
план векторных произведений в соответствии
с условием (6.5). На рис. 6.5ж построен такой
план для удобства, повернутый на 90Опо направлению вращения ротора. Замыкая
контур, получаем вектор
Моментное уравновешивание производится установкой двух одинаковых, противоположно направленных противовесов, разнесенных по длине вала на расстояние l4, и создающих момент, компенсирующий момент сил инерции от других масс. На рис. 6.2д изображен ротор с установленными противовесами, уравновешивающими ротор моментно.
Таким образом, мы рассмотрели методику, по которой для полного уравновешивания требуется три противовеса. Эту методику можно считать наиболее общей. На практике же могут возникать и различные частные случаи.
Иногда
удается произвести полное уравновешивание
одним противовесом. Дополнительные два
противовеса для моментного уравновешивания
нам понадобились по тому, что план на
рис. 6.2ж в общем случае оказывается не
замкнут, что свидетельствует о наличии
вредного момента сил инерции. Однако
если мы имеем возможность менять место
установки противовеса m3на валу и место расположения хоты бы
одной из массm1,
m2то
варьируя величинами, например,z1,z2можно сделать
замкнутым контур .
Удаётся это не всегда, так как при этом
может оказаться, что противовесm3
надо установить за пределами вала.
.
Удаётся это не всегда, так как при этом
может оказаться, что противовесm3
надо установить за пределами вала.
Вторым часто встречающимся на практике случаем является тот, когда уравновешивают каждую массу m1, m2отдельно, т.е. для каждой устанавливается свой противовес. Это может быть эффективно для небольшого количества неуравновешенных масс: 1 … 3, в противном случае это ведет к заметному утяжелению конструкции.