Умовы ўстойлівасці
|
Памернасць ураўнення |
Умовы ўстойлівасці |
|
1 |
а0 > 0 ; а1 > 0 |
|
2 |
|
|
3 |
|
|
4 |
|
 а0>0
; а1>0
; а2>0
а0>0
; а1>0
; а2>0 а0
>
0;
а1
>
0;
а2
>
0;
2
=
а1а2
– а0а3
>
0
а0
>
0;
а1
>
0;
а2
>
0;
2
=
а1а2
– а0а3
>
0 а0
>
0
i а3(а1а2
– а0а3)
–
а4а12
>
0
а0
>
0
i а3(а1а2
– а0а3)
–
а4а12
>
0Заданне
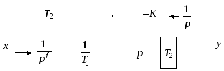
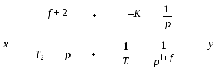
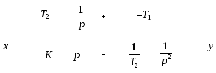
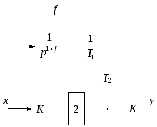
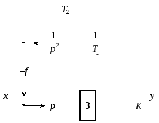
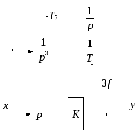
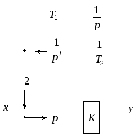
Па зададзенай структурнай схеме, згодна са сваім варыянтам (табл. 3), вызначыць эквівалентную перадатачную функцыю сістэмы.
Табліца 3
Зыходныя даныя да задачы № 2
|
№ варыянта |
Структурная схема |
|
0 |
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
Працяг табліцы 3
|
№ варыянта |
Структурная схема |
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
Заканчэнне табліцы 3
|
№ варыянта |
Структурная схема |
|
9 |
|
Параметры сістэмы прыведзены ў табл. 4.
Табліца 4
Зыходныя даныя да задачы № 2
|
Параметры |
Значэнне f | ||
|
0 |
1 |
2 | |
|
К |
20 |
4 |
12 |
|
Т1 |
0,7 |
0,5 |
0,2 |
|
Т2 |
0,2 |
0,3 |
0,4 |
Значэнне каэфіцыента f вызначаецца астаткам ад дзялення нумара першай літары прозвішча ў алфавіце на тры. Напыклад, калі прозвішча пачынаецца на літару А, то астатак будзе 1, на Б – 2, на В – 0, на Г – 1, на Д – 2, на Е – 0, на Ё – 1, на Ж – 2, на З – 0 і г. д.. Вызначыць устойлівасць атрыманай сістэмы згодна з крытэрыем Раўса–Гурвіца.
Задача № 3. Разлік пераходнага працэсу ў лінейнай сістэме аўтаматычнага рэгулявання (сар)
Аб’ектам кіравання (АК) з’яўляецца рэзервуар з прапарцыянальным рэгулятарам, напоўнены вадкасцю (мал. 3). Рэгулюемы параметр – узровень L. Абураючым уздзеяннем будзе расход вадкасці QP. Яго змяненне прыводзіць да парушэння матэрыяльнага балансу апарата і адхілення L ад зададзенага значэння Lзд.
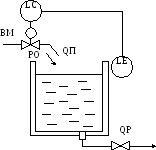
Мал. 3. Схема сістэмы аўтаматычнага рэгулявання
Узровень вымяраецца датчыкам LE. Аўтаматычны рэгулятар LC на аснове параўнання бягучага значэння L з зададзеным Lзд выпрацоўвае кіруючае ўздзеянне, якое з дапамогай выканаўчага механізма ВМ і рэгулюючага органа РО пераўтвараецца ў змяненне прытоку Qп.
Замест бягучых значэнняў L, Qp і Qп больш зручна разглядаць іх адхіленні ад некаторых зыходных значэнняў. Адзначым:
g = L – Lзд – адхіленне ўзроўню ад зададзенага значэння (выхадны параметр);
f = Qp – Qpo – адхіленне расходу ад пачатковага значэння (абураючае ўздзеянне);
u = Qп – Qпо – адхіленне прытоку адносна пачатковага значэння (кіруючае ўздзеянне).
Пры гэтых адзнаках дыферэнцыяльнае ўраўненне аб’екта кіравання мае выгляд
 , (7)
, (7)
дзе T – пастаянная часу АК; t – час; Ku – каэфіцыент перадачы АК па канале кіравання; Kf – каэфіцыент перадачы АК па канале ўзрушэння.
Мал.
4.
Структурная схема аб’екта кіравання