

ФВТ (КХТП) / Материалы для КХТП - 2002 / 5_course / 1semester / АСР-ТАУ (Дубровский) / АНАЛИТИЧЕСКОЕ ОПИСАНИЕ ОБЪЕКТА РЕГУЛИРОВАНИЯ
.docАНАЛИТИЧЕСКОЕ ОПИСАНИЕ ОБЪЕКТА РЕГУЛИРОВАНИЯ -АПЕРИОДИЧЕСКОГО ЗВЕНА ВТОРОГО ПОРЯДКА
Для более полного исследования объекта управления и правильной мотивации дальнейших действий, целесообразно подробно пояснить ход определения вида аппроксимирующего уравнения.
При последовательном соединении двух апериодических звеньев (рис.2) получаем систему, которую часто относят к элементарным динамическим звеньям и называют апериодическим звеном второго порядка. Такое звено часто отражает основные свойства реального объекта химической технологии.

Рис. 2. Принципиальная схема апериодического звена второго порядка:
Fn- объемный расход жидкости, подводимой в емкость I; F - объемный расход жидкости, подводимой в емкость П; Fp - объемный расход жидкости, стекающей из емкости II; Li -уровень жидкости в емкости I; Si - площадь поперечного сечения емкости I; Li - уровень жидкости в емкости П; Si- площадь поперечного сечения емкости П
НАСТРОЙКИ КАСКАДНОЙ АСР
Основными причинами, ограничивающими быстродействие регулятора в одноконтурной АСР, а следовательно, и точность регулирования, являются инерционность регулируемого объекта и различного рода запаздывания в передаче воздействий по каналу регулирования. В результате этого увеличение коэффициента передачи регулятора в одноконтурной АСР бывает сопряжено с ухудшением устойчивости системы. В таких случаях возможны два пути: либо усложнение закона регулирования, что не удовлетворяет жестким требованиям по простоте, надежности и удобству в обслуживании и эксплуатации аппаратуры автоматического регулирования, либо усложнение схемы регулирования. Последний путь имеет главное преимущество: при реализации более сложных схем может быть использовано сравнительно небольшое число типовых автоматических регуляторов без увеличения ассортимента средств КИП и А.
Для объектов с одним доминирующим регулируемым параметром и возможностью контроля промежуточной величины часто применяются каскадные АСР. В них вводится дополнительный контур регулирования с целью стабилизации промежуточной величины, например уровня в верхней емкости LB (рис. 6,6), за счет использования дополнительного вспомогательного регулятора. Вариант такого схемотехнического решения приведен на рис. 6.
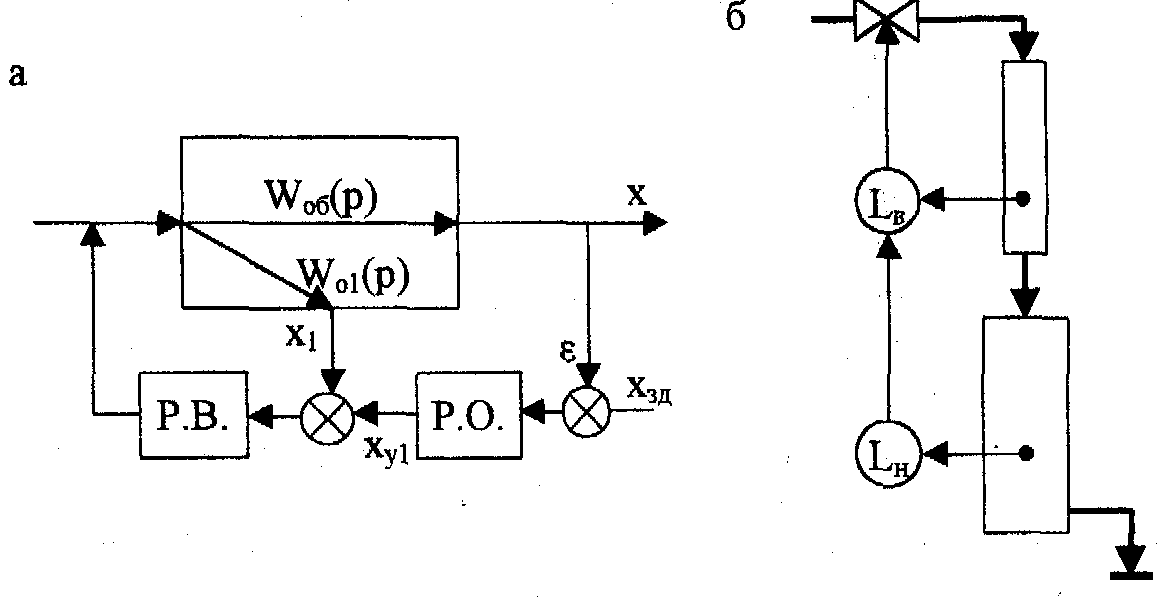
Рис. 6. Схемы каскадной АСР: а - структурная; б - принципиальная
Структурная схема каскадной АСР приведена на рис. 6,а, Здесь работа, связанная с управлением объекта регулирования, осуществляется не одним, а двумя регуляторами: основным (РО) и вспомогательным (РВ), причем регулятор РО, стабилизирующий основной регулируемый параметр х (в зависимости от его отклонения от заданного значения), воздействует при этом не на регулирующий орган исполнительного устройства, а на задатчик регулятора РВ. При этом вспомогательный регулятор поддерживает на заданном значении некоторую вспомогательную величину xi, взятую из промежуточной точки объекта
регулирования. Следует отметить, что контроль вспомогательного параметра с использованием вторичных приборов для его регистрации вовсе не обязателен.
Введение в схему регулирования дополнительного воздействия, как правило, позволяет существенно улучшить качество регулирования. При этом промежуточный параметр реагирует на возмущения со значительно меньшей инерционностью, чем основной РП.
Каскадная АСР может быть использована для улучшения качества регулирования, в том числе и для апериодического звена второго порядка, путем включения вспомогательного контура, как это показано на принципиальной схеме (см. рис. 6,6).
Для каскадной АСР апериодического звена Второго порядка целью регулирования по-прежнему остается стабилизация уровня в нижней емкости. Из-за конструктивных особенностей объекта регулирования верхняя емкость объекта, входящая в состав вспомогательного контура, обладает меньшей инерционностью и более высоким быстродействием, чем нижняя емкость. Это позволяет воздействовать на регулирующий орган до того, когда произойдет изменение уровня в нижней емкости. Эффект стабилизации уровня в нижней емкости достигается за счет того, что возмущение, идущее со стороны подачи жидкости, практически не успевает оказать влияния на основной регулируемый параметр. Управляющее воздействие на регулирующий орган в каскадной АСР оказывает входящий во вспомогательный контур П-регулятор, в качестве задания для которого выступает управляющее воздействие основного ПИ-регулятора, обеспечивающего, таким образом, более точную стабилизацию заданного уровня в нижней емкости.
Рассмотрим основные уравнения, которые рекомендуется использовать для приближенных расчетов двухкаскадных систем.
Если инерционность регулируемого объекта по каналу вспомогательной величины xi значительно меньше инерционности по каналу основной регулируемой величины х, то быстродействие регулятора РВ может быть значительно выше быстродействия регулятора РО. Тогда изменение задания регулятору РВ (величина Xyi) происходит относительно медленно, и практически регулятор РВ успевает поддерживать вспомогательную величину Xi почти точно на заданном значении, т. е. приближенно можно записать, что
![]()
В этом случае объектом регулирования для регулятора РО будет являться комплекс, состоящий из вспомогательного регулятора РВ и объекта регулирования. Назовем этот комплекс эквивалентным объектом регулирования и передаточную функцию его обозначим через Wo6.32(p).
Эта передаточная функция может быть найдена из системы уравнений:
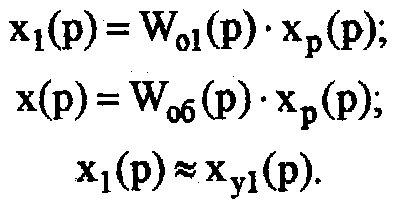
Исключив xi(p) и Хп(р), получим:
![]()
После определения параметров настройки регулятора РО по передаточной функции Wo6.a2(p) (20) находится настройка вспомогательного регулятора РВ.
Из рис. 6,а видно, что на вход вспомогательного регулятора воздействуют две параллельные системы:
1. Основной контур с передаточной функцией Wo6(p)Wpo(p).
2. Вспомогательный контур с передаточной функцией W„i(p).
Напомним, что передаточная функция системы параллельно включенных звеньев или систем параллельного действия равна сумме передаточных функции звеньев или систем.
Поэтому передаточная функция эквивалентного объекта регулирования для вспомогательного регулятора РВ определяется по формуле:
![]()
При существенно разноинерционных характеристиках Woe и Woi в рабочем диапазоне частот влияние слагаемого Wo6(p)Wpo(p) по формуле (21) обычно пренебрежимо мало и может не учитываться- т. е.
![]()
Из сказанного следует, что если основной и вспомогательный контуры существенно разноинерционны, то расчет регуляторов в каскадных системах можно производить раздельно.
Напомним, что быстродействие системы определяется в основном постоянными времени объектов регулирования. Приближенно можно принять, что раздельный расчет регуляторов можно производить, если
![]()
где Тоб , Toi - постоянные времени объекта из передаточной функции Wo6(p) и Woi(p) соответственно.
Таким образом, методику расчета каскадных АСР можно представить в виде трех этапов:
• на первом этапе рассчитывается контур, включающий в себя основной регулятор Ю и его эквивалентный объект с передаточной функцией Wo^tp). Здесь расчет регулятора выполняется с использованием методики вычисления оптимальных параметров настройки для одноконтурной АСР (см. раздел «Выбор параметров настройки одноконтурной АСР»). В этом разделе осуществляются расчет и оптимизация параметров настройки ПИ-регулятора - коэффициента усиления Kp™ и времени изодрома Ти (времени удвоения).
• на втором этапе определяются настройки регулятора РВ, входящего во вспомогательный контур. Например, при использовании в качестве РВ П-регулятора, его параметр настройки можно найти с привлечением метода незатухающих колебаний. По данному методу определяется значение критиче-
ского коэффициента усиления Кр4', а затем вычисляется коэффициент усиления П-регулятора Кр11. Для этого необходимо умножить значение Кр4' на 0.5 [4]. • на третьем этапе выполняется моделирование переходного процесса в каскадной АСР, т. е. расчеты производятся по основному и вспомогательному контурам совместно.
Так, вначале выделяем основной (рис. 7,а) и вспомогательный (рис. 8,а) контуры регулирования. Затем определяем передаточную функцию эквивалентного объекта для основного контура:
Далее, включив в состав основного контура в качестве РО ПИ-регулятор, рассчитываем его параметры настройки. Для нашего случая были получены сле-
На втором этапе необходимо осуществить расчет вспомогательного регулятора. В качестве РВ выберем самый простой, надежный и быстродействующий П-регулятор. Единственным недостатком этого регулятора является наличие статической ошибки, из-за которой регулируемый параметр не возвращается к исходному значению. В каскадной АСР использование в качестве вспомогательного П-регулятора не оставляет статической ошибки, так как основной регулятор компенсирует эту ошибку путем изменения задания вспомогательному регулятору.
При поиске стартового коэффициента усиления П-регулятора можно воспользоваться методом незатухающих колебаний (см. выше), при этом необходимо добиться того, чтобы переходной процесс сходился за 3-4 периода, как это показано на рис. 8,6. В нашем примере коэффициент усиления П-регулятора оказался равен Кр=5.
Имея результаты расчета оптимальных параметров настройки ПИ-регулятора для основного и П-регулятора для вспомогательного контуров, необходимо объединить основной и вспомогательный контуры, образующие каскадную АСР, за счет введения сумматора (звено под номером 12 на блок-схеме алгоритма, приведенной на рис. 9).
Результат совместного моделирования может оказаться неудовлетворительным, например, когда переходной процесс расходится (рис 10,а). В таких случаях необходимо исследовать, как влияют на показатели качества регулирования каждый из регуляторов в отдельности. В данном примере эта проблема была решена за счет корректировки параметров настройки основного регулятора, результат которой приведен на рис. 10,6. Скорректированные параметры настройки оказались равны: Кр=13 и Ти=6.6.
В общем случае определение оптимальной настройки каскадной АСР значительно сложнее, чем одноконтурной. Даже в простейшем варианте, когда в качестве вспомогательного регулятора используется П-регулятор, а в качестве основного - ПИ-регулятор, то даже в этом случае необходимо определить три параметра настройки. Это возможно только путем моделирования переходного процесса для каскадной АСР с привлечением как вычислительных, так и графических возможностей ПК. Теоретические аспекты этой проблемы изложены в [5].
ПРИЛОЖЕНИЕ
Таблица "Кодировка звеньев АСР"
