

Лабораторная работа №4
Анализ дискретной системы автоматического управления
Цель работы: Изучение процессов квантования по времени и уровню и ихвлияния на качество и точность цифровой системы автоматическогорегулирования.
Теоретическая часть
Для любой цифровой системы автоматического регулирования характерно преобразование непрерывных сигналов в цифровые и цифровых в непрерывные.
Первое преобразование включает процессы дискретизации непрерывного сигнала по времени (моделируется квантователем с периодом дискретности Т) и по уровню (моделируется нелинейным звеном со ступенчатой статической характеристикой).
Восстановление непрерывных сигналов по цифровым производится с помощью экстраполятора, как правило, нулевого порядка.
Процессы квантования вносят существенные особенности в работу системы автоматического регулирования.
В данной работе предлагается исследовать влияние процессов квантования по времени и уровню на качество процессов и точность цифровой системырегулирования, структурная схема которой приведена на рис. 1.
Пакет моделирования динамических системSimulink, входящий в составсистемыMatlab, предназначен для моделирования динамических систем, модели которых составляются из отдельных блоков(компонентов). Этот пакетявляется самым ярким представителем программ, созданных на основе системыMatlab.
БиблиотекаSimulink – это набор визуальных объектов, используякоторые можно исследовать практически любую систему автоматическогорегулирования. Практически для всех блоков существует возможностьнастройки параметров. Параметры настройки отражаются в панели окнанастройки выбранного блока.
Задание
1. Исключив из структурной схемы (рис. 1) квантователи и экстраполятор, получить с помощью Simulink (рис. 2) переходную функцию и реакцию на линейно нарастающий сигнал вида x(t) = t непрерывной системы.
Оценить показатели качества непрерывной системы t1, tм, tп, σ и величину установившейся ошибки εуст.
2. Получить переходную функцию и реакцию на линейно нарастающийсигнал дискретной системы при шаге квантования по времени Т = 0,01; 0,1 и 0,5и шаге квантования по уровню d = 0,01. Оценить показатели качествапереходной функции и величину установившейсяошибки.
3. Получить переходную функцию и реакцию на линейно нарастающийсигнал дискретной системы при шаге квантования по времени Т = 0,01 ишагеквантованияпо уровню d = 0,1 и 0,25. Оценить показатели качествапереходнойфункции и величину установившейсяошибки. Оформитьрезультатыизмеренийпп. 1–3 в виде табл. 1.
4. Проследить зависимость показателей качества и точности системы отшага квантования по времени T и уровню d. Сделать выводы.Индивидуальные данные по каждому варианту приведены в табл. 2.

Рис. 1. Структурная схема системы

Рис. 2. Схема модели
Таблица 1
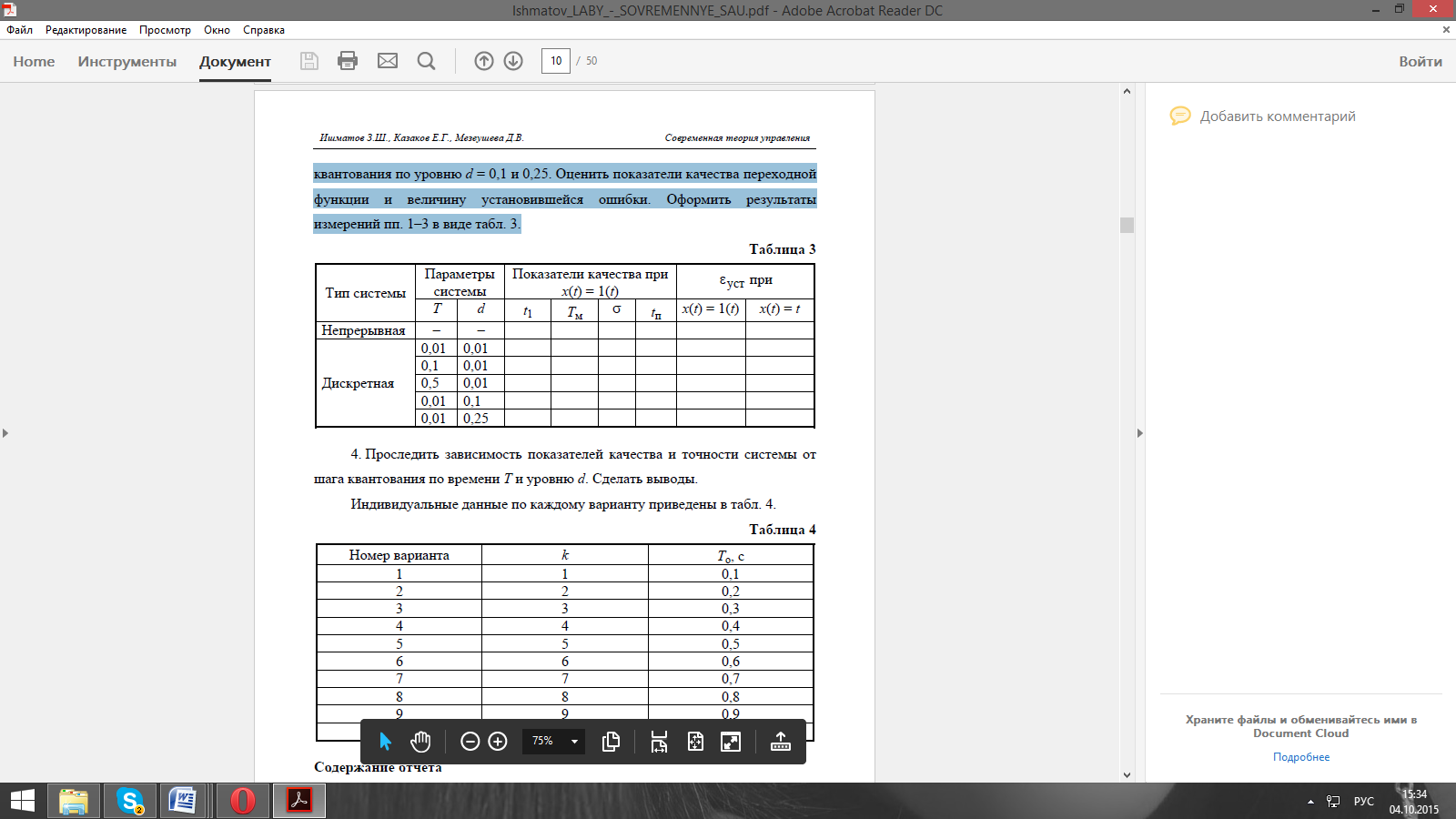
Таблица 2

Отчет по лабораторной работе должен содержать:
Цель работы
Порядок выполнения работы (пп. 1)-4))
Выводы
Контрольные вопросы
В чем отличие непрерывной САУ от цифровой САУ?
Поясните квантование непрерывного сигнала по времени и по уровню
Как влияет на переходной процесс величина шага квантования по уровню?
Как измениться выходной сигнал системы если увеличить шаг квантования по времени?
Как правильно подобрать шаг квантования?