

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
«МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕКСТИЛЬНЫЙ УНИВЕРСИТЕТ имени А.Н. КОСЫГИНА»
Учебно-методический комплекс по направлению подготовки 260700 «Технология текстильных изделий»
и по направлению подготовки 151000 «Технологические машины и оборудование»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению курсовой работы студентов по дисциплине
«Теория механизмов и машин» часть 2
Синтез и кинематический анализ кулачковых механизмов
Составитель: проф., к.т.н. С.В. Лушников, доц., к.т.н. А.Б. Соловьев, доц., к.т.н. Н.В. Степнов
Москва |
2011 |
2
Методические указания посвящены решению задач анализа рычажных механизмов. Приведены краткие теоретические сведения по курсу теории механизмов и машин, рассмотрены конкретные примеры. Методические указания направлены на развитие практических навыков при выполнении курсовой работы.
Методические указания предназначены для студентов очной формы обучения факультета технологии и производственного менеджмента.
Илл. 35, список литературы – 5 наименования.
Рецензент: зав. кафедрой ТТМ и КМ ГОУВПО «МГТУ им. А.Н. Косыгина», профессор, к.т.н. В.Н. Лохманов
Подготовлено к печати на кафедре теории механизмов, приборов и машин
Подписано в печать 00.00.00 Формат бумаги 60×84/16 Бумага множ. Усл. печ.л. 3. Заказ 000 Тираж 100 ГОУВПО «МГТУ им. А.Н. Косыгина»,
119071, Москва, ул. Малая Калужская, 1 © ГОУВПО «МГТУ им. А.Н. Косыгина»,
2011
3
СОДЕРЖАНИЕ
1. Синтез и кинематический анализ кулачковых механизмов ……………...4
Введение……..………………………………………………………………….........4
1.1Краткие теоретические сведения……………………………………………….4
1.2Задание на второй лист курсовой работы…………………………………….18
1.3Порядок выполнения второго листа курсовой работы ……………………...19
1.4Синтез и кинематический анализ кулачкового механизма аналитическим методом……………………………………………………………………………...38
1.4.1 Синтез и кинетический анализ кулачкового механизма с толкателем аналитическим методом……………………………………………………………38
1.4.2 Синтез и кинематический анализ кулачкового механизма с толкателем аналитическим методом с применением программы MathCАD………………...40 1.4.3 Синтез и кинематический анализ кулачкового механизма с коромыслом аналитическим методом……………………………………………………………43
1.4.2 Синтез и кинематический анализ кулачкового механизма с коромыслом аналитическим методом с применением программы MathCАD………………...45
Список литературы…………………………………………………………………48
4
1. Синтез и кинематический анализ кулачковых
механизмов.
Введение
Кулачковые механизмы нашли широкое распространение в технике. Они успешно применяются в машинах, машинах-автоматах, станках, аппаратах, механических приборах, манипуляторах, роботах и многих других устройствах, обеспечивая разнообразные законы движения звеньев рабочих органов механизмов, в том числе – продолжительный выстой ведомого звена при движущемся ведущем звене.
Кулачковые механизмы широко применяются и в текстильных машинах. Например, в ткацких станках типа СТБ кулачковые механизмы нашли применение в батанном и боевом механизмах, в приводе ремизных рамок и компенсатора уточной нити, обеспечивая выполнение технологического процесса тканеформирования.
Внекоторых случаях закон движения ведомого звена кулачкового механизма полностью определяется характером выполняемого технологического процесса, в других случаях при заданных максимальных перемещениях рабочего звена его закон движения может назначаться разработчиком из условий обеспечения высокой степени плавности движения с отсутствием «жестких» и «мягких» ударов, обеспечения минимизации инерционных нагрузок, реакций в кинематических парах, контактных напряжений в паре ролик-кулачок, износа рабочих поверхностей кулачка и ролика и других требований.
Вкурсовой работе студенту задаются типовые законы движения и максимальное перемещение рабочего звена кулачкового механизма, допускаемые углы давления на указанных фазах подъема и опускания, угловая скорость вращения кулачка. По этим исходным данным необходимо спроектировать кулачковый механизм, найдя его основные размеры, построить центровой и конструктивный профили кулачка графическим методом, определить с помощью построения планов скоростей и ускорений для одного положения кинематические характеристики кулачкового механизма, найти радиус кривизны центрового и конструктивного профиля.
1.1 Краткие теоретические сведения
Кулачковые механизмы подразделяются на плоские и пространственные. По характеру движения ведомого звена кулачковые механизмы подразделяются на механизмы с поступательным и качательным движениями выходного звена. С целью уменьшения потерь на трение кулачковые механизмы часто снабжаются роликами. По конструктивному исполнению кулачка и ведомого звена различают механизмы с дисковыми и барабанными кулачками, с остроконечным толкателем, с плоским и роликовым толкателем и коромыслом. Замыка-
5
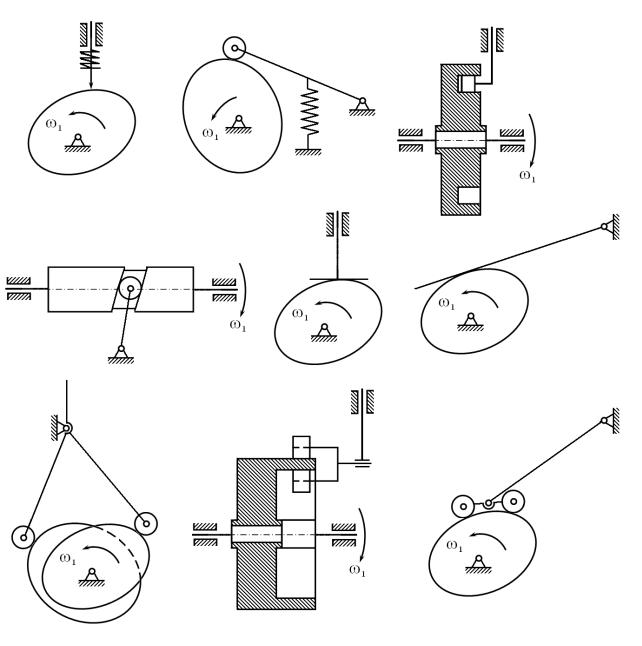
ние высшей кинематической пары обеспечивается силовым способом (пружины, грузы, пневмо-гидро-электро-магнитные устройства) и кинематическим (геометрическим) способом (кулачок и контркулачок, закрепленные на одном валу, кулачок с двумя эквидистантными профилями, т.е. кулачок с пазом или выступом). Для уменьшения сил давления и контактных напряжений ведомые звенья снабжаются несколькими роликами. Примеры перечисленных кулачковых механизмов приведены на рис. 1.
Рис. 1 Виды кулачковых механизмов
Законы движения рабочих звеньев кулачковых механизмов очень разнообразны, их количество исчисляется десятками. В качестве закона движения часто выбирается закон изменения линейного или углового ускорения ведомого звена в функции времени или вторая передаточная функция, т.е. вторая производная от перемещения ведомого звена по углу поворота кулачка.
6
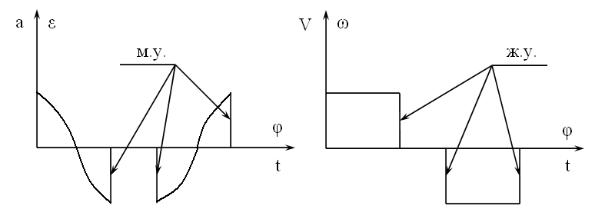
Наличие «скачка» в законе изменения ускорения или второй передаточной функции приводит к возникновению «мягких» ударов (М.У.) при работе механизма и, как следствие, появлению вибраций. Наличие «скачка» в законе изменения скорости или первой передаточной функции приводит к «жестким» ударам (Ж.У.): в механизме возникают высокие инерционные нагрузки и реакции в кинематических парах при высокоскоростных режимах. Поэтому законы последнего типа (рис. 2) рекомендуется применять при невысоких скоростях вращения кулачка.
Рис. 2 Законы движений с «мягкими» и «жесткими» ударами
В курсовой работе студенту предлагается три типовых закона движения: синусоидальный, косинусоидальный и линейный. Первый из указанных законов является плавным, безударным, два других закона вызывают появление «мягких» ударов.
Цикл работы кулачкового механизма состоит из четырех фаз: 1) фаза подъема (фаза удаления); 2) фаза верхнего выстоя (фаза дальнего стояния); 3) фаза опускания (фаза сближения); 3) фаза нижнего выстоя (фаза ближнего стояния) [1–4].
Приведем аналитические зависимости для указанных законов движения ведомых звеньев кулачковых механизмов:
1.кулачковый механизм с поступательным движением ведомого звена - толкателя
-фаза подъема (фаза удаления):
•синусоидальный закон
|
|
|
|
|
|
|
|
|
|
|
1 |
|
o |
|
|
(1) |
|||
S |
|
=S |
|
|
k |
|
|
|
− |
|
|
sin(360 |
|
|
k |
) ; |
|||
|
|
|
|
2π |
|
|
|||||||||||||
|
i |
|
|
m |
|
|
i |
|
|
|
|
|
i |
|
|
||||
V |
= Sm (1 − cos(360o k |
|
)); |
|
(2) |
||||||||||||||
|
i |
|
tп |
|
|
|
|
|
|
i |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
аi |
= |
2π Sm |
|
|
sin(360o ki ); |
|
(3) |
||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
tп2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
где ki = |
ti |
= |
|
ϕi |
; (i=0, 1, 2, …,m; m – число интервалов на угле ϕП ). |
|
|||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|
tп |
|
|
|
ϕп |
|
|
|
|
|
|
|||
tп , ϕп |
– время и угол фазы подъема; |
|
|||||||||||||||||

7
Sm – максимальное перемещение толкателя;
tп = T 360ϕп ° ,
где T − время цикла;
n − частота вращения кулачка (об/мин);
T = |
60 = |
2π, где ω = πn . |
|||||||
|
|
|
n |
ω1 |
1 |
|
|
30 |
|
|
|
|
|
|
|
||||
|
|
|
• косинусоидальный закон |
||||||
Si |
= |
Sm |
(1 − cos(180o |
ki )); |
|||||
|
|||||||||
|
|
|
2 |
|
|
|
|
|
|
V |
= |
π Sm sin(180o k |
); |
||||||
i |
|
|
2 tп |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
||
аi |
= |
|
π2 S |
m cos(180o |
|
ki ); |
|||
|
2tп2 |
|
|||||||
|
|
|
|
|
|
|
|
||
|
|
|
•линейный закон |
||||||
Si =Sm ki2 (3 − 2 ki ); |
|
|
|||||||
V |
= |
6 Sm (1 − k |
) k |
; |
|
||||
i |
|
|
tп |
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
||
аi |
= |
|
6 Sm (1 − 2ki ). |
|
|
|
|||
|
|
|
tп2 |
|
|
|
|
|
|
(4)
(5)
(6)
(7)
(8)
(9)
(10)
2.кулачковый механизм с качательным движением ведомого звенакоромысла
-фаза подъема (фаза удаления):
• синусоидальный закон
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
o |
|
|
(11) |
ψ |
|
= ψ |
|
k |
|
− |
|
sin(360 |
|
k |
) ; |
||||||||
|
|
|
2π |
|
|||||||||||||||
|
i |
|
|
|
|
m |
|
|
|
|
i |
|
|
|
|
i |
|
|
|
ωi |
= |
|
ψm (1 − cos( 360o |
ki )); |
|
(12) |
|||||||||||||
|
|
|
|
|
tп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εi |
|
= |
2π ψm |
|
sin(360o ki ); |
|
|
(13) |
|||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
tп2 |
|
|
|
|
|
|
|
|
|
|
|
||
где ψm −максимальный угол поворота коромысла; |
|
||||||||||||||||||
|
|
|
|
|
• косинусоидальный закон |
|
|||||||||||||
ψi |
= |
ψm |
(1 − cos(180o ki )); |
|
(14) |
||||||||||||||
|
|
||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ωi |
= |
|
π ψm sin(180o ki ); |
|
|
|
(15) |
||||||||||||
|
|
|
|
|
2 tп |
|
|
|
|
|
|
|
|
|
|
|
|||
εi |
= |
|
π2 ψ |
m |
|
cos(180o |
ki ); |
|
(16) |
||||||||||
|
|
|
2tп2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
•линейный закон