

3. Інтерпретація роботи електроприводу гібридного двофазного крокового двигуна за допомогою програми Mathlab
Рисунок 14 – блок-схема гібридного двохфазного крокового двигуна.
Фази двигуна подаються на два Н-моста MOSFET ШІМ перетворювачів, підключених до джерела напруги 28 В постійного струму. Фазові двигун струми незалежно під контролем двох контролерів гістерезису на основі яких генерують сигнали порушення MOSFET шляхом порівняння виміряних струмів з їх посилань. Поточні посилання Прямокутний генеруються з використанням амплітуди струму і параметри крок частоти, перелічені в діалоговому вікні. Рух крокової приводу контролюється STEP і сигналів DIR отриманої із зовнішніх джерел.
Наступні сигнали отримують з моделювання 0,25 сек роботи крокового приводу двигуна, протягом якого крокової повертається впродовж 0,1 сек в позитивному напрямку, зупиняється на 0,05 сек, обертається в зворотному напрямку за 0,05 сек і зупиняється.
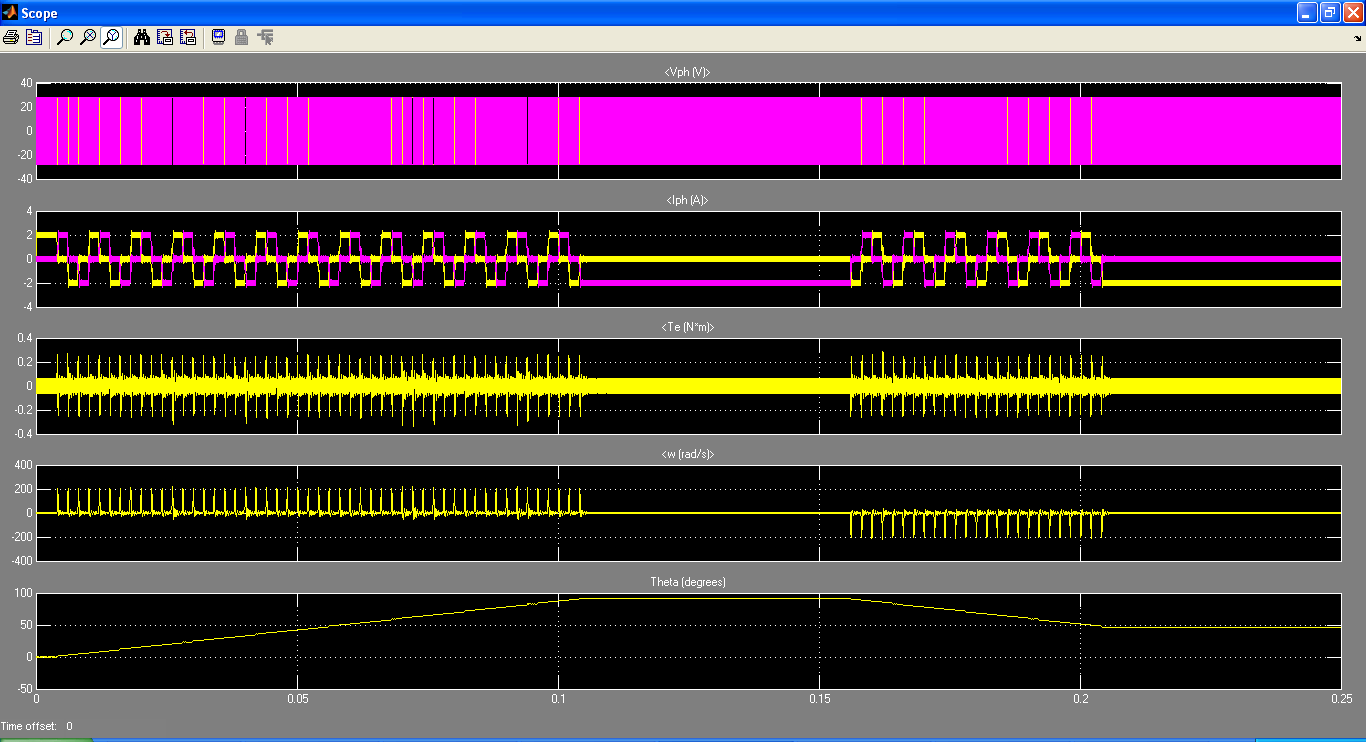
Рисунок 15 – графіки проведеного дослідження (1 — зміна напруги живлення; 2 — зміна струму;
3 — зміна крутного моменту; 4 — зміна швидкості обертання ротора; 5 — зміна положення ротора;)
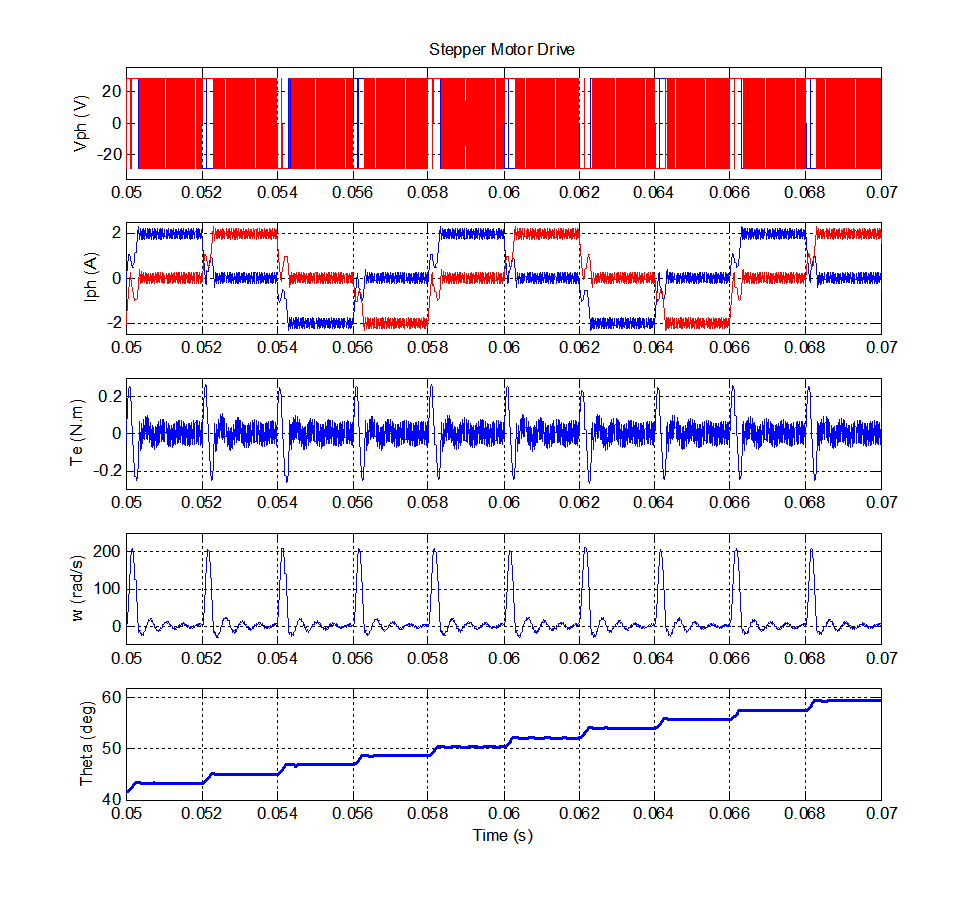
Рисунок 16 – графік залежності зміни напруги, струму, крутного моменту, швидкості ротора, положення ротора з часом відповідно.
Блок
сигнал Builder 
Створює і генерує змінні групи сигналів, чиї хвилі є кусочно-лінійна. Блок сигналу Builder дозволяє створювати взаємозамінні групи джерел кусочно-лінійних сигналів і використовувати їх в моделі.
Блок сигналу Builder виводить скаляр або масив реальних сигналів типу Double.
Блок сигналу Builder має той же діалогове вікно, що і підсистеми блоку. Щоб відкрити діалогове вікно потрібно вибрати Subsystem параметри з контекстного меню блоку.
Характеристика Блок сигналу Builder
|
Час |
Безперервний |
|
Скалярні розширення |
Так, переметрів |
|
Вимірювання |
Так |
|
Перетин нуля |
Так |
4. Приводи і Драйвери
Блок крокового двигуна являє собою кроковий двигун. Він використовує вхідні імпульси, А і В, щоб контролювати механічну потужність у відповідності з наступними рівняннями:
![]()
![]()
![]()
![]()
де:
• іА, іB є А і В є фази обмотки струмів.
• Va. та Vb A і В фази в обмотці напруги.
• Км постійна моменту двигуна.
• Nr це кількість зубів на кожному з двох полюсів ротора. Повний розмір кроку (π / 2) / Nr.
• R є опір обмотки.
• L є індуктивність обмотки.
• B є обертальний демпфірування.
• J є інерція.
Якщо початкове положення ротора дорівнює нулю або кратна (π / 2) / NR, то ротор суміщений з фазою обмотки А. Це відбувається, коли є позитивний струм, що протікає від А + до А-портами і є немає струму, що протікає від B + до В-портів.
Для створення імпульсів для блоку крокової двигуна потрібно використовувати драйвер крокового двигуна.
Блок крокового двигуна дає позитивний крутний момент, що діє від механічного С до R портів, коли фаза імпульсу А веде фазу імпульсу B.
Основні припущення та обмеження
Модель заснована на наступних припущеннях:
• Ця модель не враховує магнітні ефекти насичення, що фіксує моменту і будь магнітного зв'язку між фазами.
• При виборі Моделювання Почати сталого прапорець державної в блоці Simscape Рішення Configuration від, цей блок не буде ініціалізувати Початкове значення кута ротора між-π і π.
Блок крокового двигуна
 Блок
крокового
двигуна являє собою драйвер крокової
двигуна. Створення
імпульсів, А і В, потрібно для керування
двигуном. Цей блок ініціює крок кожен
раз, коли напруга на ШІМ порту підноситься
над Включення порогового напруги.
Блок
крокового
двигуна являє собою драйвер крокової
двигуна. Створення
імпульсів, А і В, потрібно для керування
двигуном. Цей блок ініціює крок кожен
раз, коли напруга на ШІМ порту підноситься
над Включення порогового напруги.
Якщо напруга на REV порту менше або дорівнює порогові напрузі зворотної, імпульс призводить імпульсу B на 90 градусів. Якщо напруга на REV порту більше, ніж порогова напруга зворотного, імпульс B призводить імпульсом на 90 градусів і напрямок двигуна змінюється на протилежний. У нульовий момент часу, пульс є позитивною, і імпульс В негативний.
Щоб створити напругу на ШІМ-порт потрібно використовувати контрольований блок ШІМ напруги,. Цей блок створює мережу двигуна кожного разу, коли сигнал ШІМ йде високими. Коли запустити тригери починається моделювання з точку, коли сигнал ШІМ стає високим, що забезпечує хорошу точність моделювання. Якщо замість цього використовувати контрольовану напругу джерела блоку з бібліотеки Foundation, який контролюється Simulink, необхідно встановити відповідним невеликий часовий крок для моделювання. Відомості про зазначення в Simulink розмір кроку.