

Методические указания для выполнения лабораторных работ
5.1 Ввод данных двигателя
Для оптимального соответствия скорости – вращающего момента привода, необходимо ввести данные с фирменной таблички подсоединенного двигателя.
При использовании Lenze двигателя выберите тип двигателя в C0086 (см. Code-list). Контроллер установит все остальные данные двигателя автоматически.
Если тип двигателя приведен в С0086, то выполнение следующих действий можно пропустить.
Если тип двигателя не приведен в C0086, то установите данные двигателя вручную:
C0006: рабочий режим управление двигателем
С0022: адаптированный к максимальному ток двигателя Imax
С0081: номинальная мощность двигателя
С0087: номинальная скорость двигателя
С0088: номинальный ток двигателя
С0089: номинальная частота двигателя
С0090: номинальное напряжение двигателя
С0091: КПД двигателя
Только при очень высоких требованиях к качеству управления или работы непосредственным управлением скоростью SSC:
C0084: сопротивление статора двигателя
С0085: индуктивность рассеяния двигателя
Для подтверждения сохранения параметров выполнить обязательное действие:
C0003: сохранить параметры (Save PS1) в памяти контроллера, выбрав «1»
Существует несколько режимов управления электроприводом:
Управление моментом;
Управление скоростью;
Позиционирование.
Перед выполнением лабораторных работ выполнить автонастройку.
Шаги автонастройки:
войти в меню «Control parameter identification» (рис. 5.1);

Рисунок 5.1 – Диалоговое окно автонастройки
выбрать режим настройки в Mode (см. рис. 5.2);

Рисунок 5.2 – Всплывающее окно выбора режима автонастройки
запустить кнопкой Start;
дождаться окончания отработки выбранного режима настройки.
Обязательно произвести настройку во всех режимах автонастройки Mode для полного вычисления всех нужных контроллеру параметров.
Лабораторная работа №1 Параметрирование контроллера сервопреобразователя Lenze для работы в режиме управления скоростью
Цель работы – изучить способы настройки параметров для режима управления скоростью сервопреобразователя частоты серии LENZE 9300 Servo с помощью персонального компьютера и программного обеспечения GDC.
Существует несколько способов формирования задания на скорость:
Задание, формируемое аналоговым входом;
Предустановленные скорости (режим JOG);
Мотор-потенциометр.
Есть возможность использования внутреннего или внешнего источника 24V для питания дискретных и аналоговых входов-выходов. Схемы подключения для указанных вариантов представлены на рис. 5.3-5.6.

Рисунок 5.3 – Схема соединения аналоговых сигналов с питанием от внутреннего источника напряжения 24V.

Рисунок 5.4 – Схема соединения аналоговых сигналов с питанием от внешнего источника напряжения 24V.
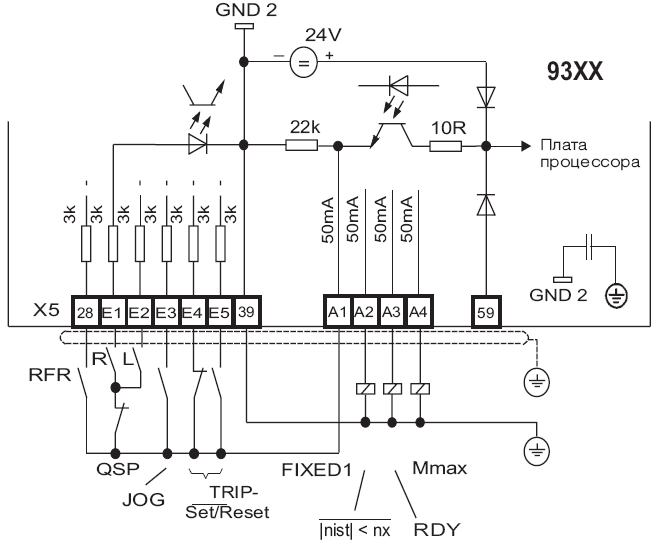
Рисунок 5.5 – Схема соединения цифровых сигналов с питанием от внутреннего источника напряжения 24V.

Рисунок 5.6 – Схема соединения цифровых сигналов с питанием от внешнего источника напряжения 24V.
В дальнейшем будем рассматривать реализацию режима управления скоростью с использованием схем соединения с питанием от внутреннего источника напряжения 24V.
Внимание! Все изменения параметров необходимо вести при заблокированном приводе, для этого должна быть разомкнута связь X5/28 с A1.
Рассмотрим порядок действий для формирования задания на скорость от аналоговых входов и от предустановленных скоростей при помощи программного обеспечения «GDC»:
1) В программном пакете «GDC» в разделе «Parameter menu» необходимо выбрать подменю «Dialog Basic settings». В появившемся окне выбрать в поле Configuration выбрать режим «Speed mode» (по умолчанию установлен Common). Это же можно проделать в Code-list, установив параметр: C0005=1000 (см. рис. 5.7).

Рисунок 5.7 – Выбор режима управления
2) В «Parameter menu» выбрать подменю «Dialog Terminals(digital)». В этом подменю обязательно необходимо деактивировать дополнительный сигнал блокировки контроллера ошибкой, изменив сигнал с LOW на HIGH на цифровом входе X5/E4 (см. рис. 5.8). Ошибка отображается в окне мониторинга в виде сообщения EEr. Это же действие можно провести с помощью Code-list: C0114 = High active. По умолчанию на цифровой вход X5/E4 возложена функция установки дополнительной блокировки DCTRL-TRIP-SET, служащая для обеспечения безопасности при случайном съеме основной разблокировки контроллера (связь X5/28 с A1).
В этом же меню необходимо изменить сигнал на входе Х5/Е5 в следующем порядке по уровню сигнала: «0-1-0», т.е. «High-Low-High» для сброса текущей ошибки.
После выполненных действий выйти из подменю, нажав кнопку Back.

Рисунок 5.8 – Деактивация дополнительной блокировки контроллера ошибкой
3) В разделе «Parameter menu» выбрать подменю «Dialog Terminals(analog)». В этом подменю необходимо установить фиксированное значение напряжения Fixed100% (10V) в поле Analog output в строке X6/63 (см. рис 5.9). Это же действие можно провести с помощью Code-list: C0436=1006 (Fixed100%).

Рисунок 5.9 – Присвоение для клеммы X6/63 фиксированного значения напряжения в 10V (Fixed100%).
Основным функциональным блоком, отвечающим за формирование задания на скорость, является блок NSET (см. рис 5.10б). Он связывает сигнал основного задания на скорость NSET-N и сигнал дополнительного задания NSET-N-ADD. Кроме того, в нем можно осуществить выбор источника задания на скорость, можно инвертировать сигнал задания, ограничить значение рывка, используя так называемую “S-рампу”, и установить 15 уставок JOG (предустановленных скоростей). Описание сигналов функционального блока NSET представлено в таблице 5.1.
По умолчанию сигнал на входе NSET-N равен сигналу на выходе NSET-NOUT (т.е. C0046=C0190, где:
C0046 – задание скорости в % подаваемое на вход NSET-N;
C0190 – выполнение арифметических операция (по умолчанию «0», что означает «функция отключена»).
В базовой конфигурации режима Speed mode уже предусмотрена связь между выходом NSET-NOUT функционального блока NSET и входом MCTRL-N-SET функционального блока MCTRL (см. рис. 5.10а и рис. 5.10б).
MCTRL – функциональный блок, отвечающий за управление приводом (см. рис 5.8a). В его функции входит:
– регулирование тока;
– ограничение момента;
– формирование задание на момент;
– управление скоростью;
– управление моментом с ограничением скорости;
– ограничение основного задания на скорость;
– использование фазового регулятора;
– управление ослаблением поля;
– управление быстрой остановкой (QSP);
– изменение частоты ШИМ.
Описание сигналов функционального блока MCTRL представлено в таблице 5.2.
Функциональные блоки NSET и MCTRL являются основными блоками, которые отвечают за формирование задания на скорость и управление приводом. По умолчанию между соответствующими входами-выходами этих блоков уже установлена связь.
Таблица 5.1 Сигналы функционального блока NSET
|
Сигнал |
Код настройки |
Описание | |||
|
Имя |
Тип |
Код просмотра |
Формат | ||
|
NSET-N |
a |
C0046 |
dec [%] |
C0780 |
Предусмотренный основной setpoint; другие сигналы допустимы |
|
NSET-N-ADD |
a |
C0047 |
dec [%] |
C0782 |
Предусмотренный дополнительный setpoint; другие сигналы допустимы |
|
NSET-JOG*1 |
d |
C0799/4 |
bin |
C0787/1 |
Выбор и управление шунтирования ”установленными setpoints" для основного setpoint |
|
NSET-JOG*2 |
d |
C0799/5 |
bin |
C0787/2 | |
|
NSET-JOG*4 |
d |
C0799/6 |
bin |
C0787/3 | |
|
NSET-JOG*8 |
d |
C0799/7 |
bin |
C0787/4 | |
|
NSET-Ti*1 |
d |
C0799/8 |
bin |
C0788/1 |
Выбор и управление альтернативными ”установленными setpoints" для основного setpoint |
|
NSET-Ti*2 |
d |
C0799/9 |
bin |
C0788/2 | |
|
NSET-Ti*4 |
d |
C0799/10 |
bin |
C0788/3 | |
|
NSET-Ti*8 |
d |
C0799/11 |
bin |
C0788/4 | |
|
NSET-N-INV |
d |
C0799/1 |
bin |
C0781 |
Управление сигналом инверсии для основного setpoint |
|
NSET-NADD-INV |
d |
C0799/2 |
bin |
C0783 |
Управление сигналом инверсии для дополнительного setpoint |
|
NSET-RFG-0 |
d |
C0799/12 |
bin |
C0789 |
Основной setpoint интегратор служащий обнуления через мгновенные времена Ti |
|
NSET-RFG-STOP |
d |
C0799/13 |
bin |
C0790 |
Остановка (замораживания) основного setpoint интегратора к ее мгновенной величине |
|
NSET-CINH-VAL |
a |
C0798/1 |
dec [%] |
C0784 |
Генерируется сигнал, который должен быть принят основным setpoint интегратором, когда регулятор запрещен |
|
NSET-SET |
a |
C0798/2 |
dec [%] |
C0785 |
Генерируется сигнал, который должен быть принят основным setpoint интегратором, когда вход NSET-LOAD установлен |
|
NSET-LOAD |
d |
C0799/3 |
bin |
C0786 |
Управление этих двух генераторов пилообразного напряжения в специальных ситуациях например. QSP |
|
NSET-OUT |
a |
- |
- |
- |
- |
|
NSET-RFG-I=0 |
d |
- |
- |
- |
- |
Таблица 5.2 Сигналы функционального блока MCTRL
|
Сигнал |
Код настройки |
Описание | |||
|
Имя |
Тип |
Код просмотра |
Формат | ||
|
MCTRL-PHI-SET |
ph |
C0908 |
Dec [%] |
C0894 |
Регулятор фазы входа для разности между набором и фактической фазой |
|
MCTR-N-SET |
A |
C0906/1 |
Dec [%] |
C0890 |
Вход скоростного setpoint |
|
MCTRL-M-ADD |
A |
C0906/2 |
Dec [%] |
C0891 |
Дополнительный вращающий момент setpoint или вращающий момент setpoint |
|
MCTRL-LO-MLIM |
A |
C0906/3 |
Dec [%] |
C0892 |
Нижний предел в % от кода C0057 |
|
MCTRL-HI-MLIM |
A |
C0906/4 |
Dec [%] |
C0893 |
Верхний предел в % от кода C0057 |
|
MCTRL-PHI-LIM |
A |
C0906/5 |
Dec [%] |
C0895 |
Влияние фазового регулятора в % от Nmax в коде C0011 |
|
MCTRL-N2-LIM |
A |
C0906/6 |
Dec [%] |
C0896 |
Более низкое ограничение скорости для ограничения скорости |
|
MCTRL-FLDWEAK |
A |
C0906/7 |
Dec [%] |
C0898 |
Возбуждение двигателя |
|
MCTRL-I-SET |
A |
C0906/8 |
Dec [%] |
C0901 |
Вход, чтобы установить I-узел регулятора частоты вращения |
|
MCTRL-P-ADAPT |
A |
C0906/9 |
Dec [%] |
C0903 |
Влияние в % на VP в коде C0254; абсолютная величина (без знака) обрабатывается |
|
MCTRL-PHI-ON |
D |
C0907/1 |
Dec [%] |
C0897 |
ВЫСОКИЙ = Активация влияния фазового регулятора |
|
MCTRL-N/M-SWT |
D |
C0907/2 |
Dec [%] |
C0899 |
НИЗКИЙ = активное регулирование скорости ВЫСОКИЙ = активное управление моментом |
|
MCTRL-QSP |
D |
C0907/3 |
bin |
C0900 |
ВЫСОКИЙ = Привод выполняет QSP |
|
MCTRL-I-LOAD |
D |
C0907/4 |
bin |
C0902 |
ВЫСОКИЙ = I-узел n-регулятора принят от MCTRL-I-SET |
|
MCTRL-PHI-ACT |
Phd |
- |
- |
- |
- |
|
MCTRL-PHI-ANG |
Ph |
- |
- |
- |
65536 inc = один оборот |
|
MCTRL-NACT |
A |
- |
- |
- |
в % от Nmax (C0011) |
|
MCTRL-PHI-ANA |
A |
- |
- |
- |
Фактическая фаза как аналоговый сигнал 90 градусов = 100 % |
|
MCTRL-MACT |
A |
- |
- |
- |
в % от Mmax (C0057) |
|
MCTRL-MSET2 |
A |
- |
- |
- |
В% от Mmax (C0057) |
|
MCTRL-NSET2 |
A |
- |
- |
- |
в % от Nmax (C0011) |
|
MCTRL-DCVOLT |
A |
- |
- |
- |
100 % = 1000V |
|
MCTRL-QSP-OUT |
D |
- |
- |
- |
ВЫСОКИЙ = Привод выполняет QSP |
|
MCTRL-MMAX |
D |
- |
- |
- |
ВЫСОКИЙ = Регулятор частоты вращения работает в пределах своего предела |
|
MCTRL-IMAX |
D |
- |
- |
- |
ВЫСОКИЙ = Привод работает в своем текущем пределе C0022 |
|
MCTRL-IACT |
A |
- |
- |
- |
- |
Для дальнейшего чтения функциональных блоков используйте таблицу 5.3
Таблица 5.3
Таблица описания некоторых составляющих ФБ
|
Символ |
Единица измерения |
Обозначение |
Описание |
|
|
– |
– |
Соединение сигналов в версии заводской установки |
|
|
% |
a |
Аналоговый вход, может быть произвольно подключен к любому аналоговому выходу |
|
|
% |
a |
Аналоговый выход |
|
|
Двоичная |
d |
Цифровой вход, может быть произвольно подключен к любому цифровому выходу |
|
|
Двоичная |
d |
Цифровой выход |
|
|
Об/мин |
phd |
Вход для сигналов скорости, может быть произвольно подключен к любому выходу сигналов скорости |
|
|
Об/мин |
phd |
Выход сигналов скорости |
|
|
В приращениях |
ph |
Вход для фазовых сигналов, может быть произвольно подключен к любому выходу фазовых сигналов |
|
|
В приращениях |
ph |
Выход фазовых сигналов |
4) В меню управления связями между сигналами «Dialog Signal configuration» создать (проверить наличие) связь между входом задания на скорость NSET-N функционального блока NSET и выходом AIN1-OUT (AIN2-OUT) функционального блока AIN. Подавать задание на скорость NSET-N можно двумя путями (см. рис 5.11, A или B), для этого следует предварительно удалить текущую связь ASW1-N1 с AIN2-OUT в коде С0810=1000 (Fixed 0%) и создать нужную связь, но она должна быть только одна. Соединить одновременно оба аналоговых выхода с заданием на скорость невозможно.
 Рисунок 5.10а
– Связь между выходом ф.б. NSET
и входом ф.б. MCTRL
Рисунок 5.10а
– Связь между выходом ф.б. NSET
и входом ф.б. MCTRL

Рисунок 5.10б – Связь между выходом ф.б. NSET и входом ф.б. MCTRL

Рисунок 5.11 – Выбор связи между входом NSET-N и выходом X6/1,2 или X6/3,4
Эту же операцию создания связи можно с помощью Code-list: C0780=50(55).
Операция выполнения в виде рисунков:

Рисунок 5.12 – Создание связи между входом NSET-N и аналоговым выходом AIN1(2)-OUT.
По умолчанию в режиме скорости стоит связанный выход MCTRL-NACT с входом X6/62 , окно которого отображает активную скорость MCTRL-NACT (см. рис. 5.13), снятую датчиком обратной связи по скорости – резольвером в процентном соотношении от Nmax (Сode-list: C0011).
В результате можно отследить то значение в % от 10V, которое задается через потенциометр на клеммы X6/1,2 или X6/3,4 и получаемую скорость в % от заданной (см. рис. 5.13).


Рисунок 5.13 – Отображение уровня задаваемого напряжения (X6/1,2(3,4)) в % и активной скорости(X6/62) в % от Nmax.
5) Отключение влияния фазового регулятора на задание скорости (см. рис. 5.14).
В «Parameter menu» выбрать подменю «Code-list» и в коде C0897 установить фиксированный нуль: C0897=1000 (Fixed 0).
Направление сигнала фазового регулятора можно отследить в ф.б. MCTRL (см. рис. 5.10а).

Рисунок 5.14 – Отключение влияния фазового регулятора.
6) В выбранной конфигурации (C0005 = 1000 [Speed mode]) уже стоит связь цифровых входов на определенную функцию (см. рис. 5.15).

Рисунок 5.15 – Связи цифровых входов по умолчанию.
Изменение уровня сигнала на любом из входов будет активировать функцию.
В меню управления цифровыми сигналами «Dialog Terminals(digital)» доступно изменение уровня сигнала на цифровые входы с LOW на HIGH и обратно. Для этого нужно выделить левой кнопкой мыши нужный цифровой вход и изменить уровень сигнала на задуманный (см. рис. 5.16).

Рисунок 5.16 – Диалоговое окно для изменения уровня сигнала на цифровых входах
На рис. 5.16 приведен пример как выглядит измененный сигнал на цифровом входе X5/E1, которые активирует функцию R/L/Q-R.
Список связанных функций с цифровыми входами в данной конфигурации:
X5/E1 – R/L/Q-R – выбор положительного вращения,
X5/E2 – R/L/Q-L – выбор отрицательного вращения,
X5/E3 – NSET-JOG*1 – выбор предустановленной скорости JOG*1,
X5/E4 – DCTRL-TRIP-SET – дополнительный сигнал блокировки контроллера ошибкой,
X5/E5 – DCTRL-TRIP-RESET – сброс активного статуса ошибки.
Изменить уставку JOG можно в Code-list: C0039/x = xxx %, где ххх – изменяемое значение в % от Nmax(C0011).
Есть возможность выбрать до 15 уставок JOG. Входные NSET-JOG*x закодированы таким образом, что к 15 значениям JOG можно обратиться, зная таблицу кодировки.
Таблица 5.4
Кодировка уставок NSET-JOG*x
|
Выходной сигнал |
NSET-JOG*1 |
NSET-JOG*2 |
NSET-JOG*3 |
NSET-JOG*4 |
|
NSET-N |
0 |
0 |
0 |
0 |
|
JOG 1 |
1 |
0 |
0 |
0 |
|
JOG 2 |
0 |
1 |
0 |
0 |
|
JOG 3 |
1 |
1 |
0 |
0 |
|
JOG 4 |
0 |
0 |
1 |
0 |
|
JOG 5 |
1 |
0 |
1 |
0 |
|
JOG 6 |
0 |
1 |
1 |
0 |
|
JOG 7 |
1 |
1 |
1 |
0 |
|
JOG 8 |
0 |
0 |
0 |
1 |
|
JOG 9 |
1 |
0 |
0 |
1 |
|
JOG 10 |
0 |
1 |
0 |
1 |
|
JOG 11 |
1 |
1 |
0 |
1 |
|
JOG 12 |
0 |
0 |
1 |
1 |
|
JOG 13 |
1 |
0 |
1 |
1 |
|
JOG 14 |
0 |
1 |
1 |
1 |
|
JOG 15 |
1 |
1 |
1 |
1 |
Для работы в режиме «Предустановленные скорости JOG» необходимо создать связь закодированных уставок NSET-JOG*x с цифровыми входами, используя редактор функциональных блоков, или оперируя кодами С0787/1-4. Пример связи представлен на рисунке 5.17.

Рисунок 5.17 – Пример созданных связей уставок NSET-JOG*1 и NSET-JOG*2 c цифровыми входами X5/E3 и X5/E4.
Примечание!
При двух одинаковых сигналах на X5/E1 и X5/E2 будет запущена функция QSP – «квик стоп», которая будет удерживать двигатель на нулевой скорости.
Приоритет над сигналами, связанных с входами X5/E1 и X5/E2, имеет сигнал X5/E3 (при HIGH), который поглощает вышеописанные сигналы и активирует функцию «предустановленная скорость». Если изменить сигнал на LOW на X5/E3, то будут активны те входы, на которых стоял сигнал HIGH до изменения сигнала на X5/E3.
Изменять сигнал на входе X5/E5 только после устранения причины ошибки.
После выполненных процедур появляется возможность управлять с помощью потенциометров, присоединенных к клеммам X6/1,2 и X6/3,4, напряжение на которые будет идти с X6/62, но для начала должны задать направление вращения с помощью цифрового входа, оперируя кнопочной панелью или меню «Dialog Terminals (digital)».
Так же
нужно отправить настройки в независимую
память контроллера с помощью клавиши
F5
или кнопки
![]() ,
находящейся в панели инструментов.
,
находящейся в панели инструментов.
Необходимо обратить внимание, что следует обязательно разблокировать контроллер (enable controller), замкнув X5/28 с A1. После этого действия будут доступны все функции управления двигателем с помощью цифровых и аналоговых входов.
Рассмотрим порядок действий для формирования задания на скорость с помощью функции «мотор-потенциометр», используя программное обеспечения «GDC».
Мотор-потенциометр – доступная функция сервопреобрезователя частоты Lenze 9300 Servo, которая отвечает за способ формирования задания на скорость.
Для понимания работы функции мотор-потенциометра рассмотрим функциональный блок MPOT1(рис 5.18) и диаграмму его работы (см. рис 5.19, 5.20).

Рисунок 5.18 – Функциональный блок функции «мотор-потенциометра» MPOT1

Рисунок 5.19 – Диаграмма работы функции «мотор-потенциометр»

Рисунок 5.20 – Диаграмма работы функции «мотор-потенциометр» с использованием функции «деактиватора мотор-потенциометра MPOT1-INACT»
Рассмотрим порядок действий для реализации режима управления скоростью при формировании задания с помощью функции «мотор-потенциометр»
Выполнить 1-3, 5 пункты настройки, которые указаны в «Порядке действий для реализации режима управление скоростью с помощью аналоговых входов и режима предустановленных скоростей» (часть 1). Далее выполнить следующие пункты:
В меню управления связями между сигналами (связь входов и выходов, как аналоговых так и цифровых) «Dialog Signal configuration» создать (проверить если создана) связь между входом задания на скорость NSET-N и выходом мотор-потенциометра MPOT1-OUT или с помощью Code-list: С0780/0=5100 (см. рис. 5.21). Это же действие можно выполнить, используя редактор функциональных блоков.
Замечание к п. 1!
Так же возможно соединить выход мотор-потенциометра MPOT1-OUT с дополнительным заданием на скорость NSET-NADD (С0782=5650). Что позволяет использовать функцию мотор-потенциометр как источник дополнительного задания на скорость. Он может работать совместно с основным заданием на скорость NSET-N, если установить арифметическую функцию в коде С0190 (по умолчанию арифметическая функция отключена). Это же действие можно выполнить, используя редактор функциональных блоков FB editor. При использовании функции мотор-потенциометра, как дополнительное задание на скорость, необходимо установить время разгона и торможение, отвечающие за дополнительное задание, в коде С0221 и С0222.

Рисунок 5.21 – Связь между выходом MPOT1-OUT с входами NSET-N или NSET-NADD функционального блока формирования скорости NSET
Удалить текущие связи цифровых входов Е1-Е3 от установленных по умолчанию сигналов и установить связь с сигналами функционального блока MPOT1, как показано на рис. 5.21. Это же действие можно выполнить при помощи Code-list:
С0267/1=51
С0267/2=52
С0267/3=53
3) Установить необходимые пределы для функции мотор потенциометра в кодах С0260 и С0261 в % от Nmax. Отрицательные/положительные значения отвечают за направление вращения вала двигателя.
Установить время разгона и торможения в кодах С0262 и С0263.
В п.5 и п.6 указано описание кодов конфигурирования функции MPOT-CTRL функционального блока MPOT1, по умолчанию влияние функций на сигнал отсутствует, т.е. в кодах С0264 и С0265 установлен «0».
5) В коде С0264 устанавливается функция при использовании сигнала MPOT1-INACT, которая деактивирует функцию «мотор-потенциометр», который, в свою очередь, можно активировать при изменении уровня сигнала на цифровом входе Е3. Функции деактиватора «мотор-потенциометра» MPOT1-INACT при С0264=:
«0» – нет дальнейшего действия,
«1» – возврат в 0% от Nmax с tторм.,
«2» – возврат в «С0261» с tторм.,
«3» – немедленный прыжок выхода MPOT1-OUT в 0% от Nmax (функция запасного ограничителя),
«4» – немедленный прыжок выхода MPOT1-OUT в «С0261»,
«5» – подъём задания в «С0260» с tразг..
В коде С0265 устанавливается функция инициализации «мотор-потенциометра». Величина, которая принята во время основных переключений и активации "мотор-потенциометра", устанавливается в коде С0265:
«0» – Величина во время основного отказа,
«1» – Нижний предел в С0261
«2» – 0 %
Для включения в работу функции «мотор-потенциометр» войдите в редактор функциональных блоков “FB editor” и кликните по функциональному блока МРОТ1 в поле выбора функциональных блоков слева. Во всплывающем окне Processing List в свободной строке выберите модуль МРОТ1. Это же можно сделать с помощью Code-list: C0465/2=5100.
Создайте связь цифрового входа Е4 с сигналом, отвечающим за выбор направления вращения вала двигателя. Это действие можно проделать с помощью редактора функциональных блоков FB editor, так же с помощью кодов С0886(С0887)=54 (DIGIN4).
Сохранить изменения С0003=1.
После выполненных действий получаем возможность управлять заданием на скорость с помощью функции мотор-потенциометр, используя цифровые входы для увеличения/уменьшения скорости вращения вала двигателя и функции «деактиватор мотор-потенциометра».
После выполненных
процедур необходимо отправить все
настройки в независимую память контроллера
с помощью клавиши F5
или кнопки
![]() ,
находящейся в панели инструментов.
,
находящейся в панели инструментов.
Необходимо обратить внимание, что следует обязательно разблокировать контроллер (enable controller), замкнув X5/28 с A1. После этого действия будут доступны все функции управления двигателем с помощью цифровых и аналоговых входов.
Задание к лабораторной работе 1 «Режим управление скоростью».
Рекомендуется настроить окно мониторинга для наблюдения изменяемых входных и выходных величин задания на скорость.
– Формирование задание на скорость JOG (предустановленные скорости):
Используя последовательное изменение уровня сигнала на 3 цифровых входах, добиться разгона двигателя до 1000 об/мин, перехода до 1500 об/мин и до 2500 об/мин.
Используя поочередное изменение уровня сигнала на 3 цифровых входах, добиться разгона до 500 об/мин с последующим выходом на 2000 об/мин и полным торможением.
– Формирование задание на скорость с помощью функции MPOT1:
Запараметрировать контроллер для работы привода в диапазоне скоростей от 1500 об/мин до 2500 об/мин.
Запараметрировать контроллер для работы привода в диапазоне
от -50% до +50% от Nmax (C0011).
Запараметрировать контроллер для работы привода в диапазоне от -25% до 75% от Nmax. Произвести выход в любое значение скорости из этого диапазона и проследить влияние функции «деактиватор мотор-потенциометра», используя все значения в коде С0264, отвечающий за параметрирование этой функции.
– Комплексное задание:
Используя аналоговое задание, произвести разгон двигателя до 2000 об/мин. Остановить двигатель и вновь разогнать до 2000 об/мин, используя функцию мотор-потенциометр как дополнительное задание на скорость. (используйте необходимые пределы MPOT1 во избежание выхода двигателя на высокую скорость)
Используя функцию мотор-потенциометр, как основное задание на скорость, разогнать двигатель до Nmax. Спустя 10 секунд произвести останов двигателя с помощью аналогового задания, установленное как дополнительное задание на скорость.
Используя аналоговое задание, как основное задание на скорость, произвести разгон двигателя до 2500 об/мин. Приостановить двигатель до 500 об/мин и вновь разогнать до 2000 об/мин, используя функцию мотор-потенциометр как дополнительное задание на скорость.
Вопросы:
В чем заключается смысл дополнительного задания? Есть ли приоритет основного перед дополнительным заданием на скорость? Обоснуйте ответ.
Возможно ли одновременно формировать задание на скорость двигателя из разных источников задания? используя все виды задания на скоростью. Поясните, используя функциональный блок формирования задания на скорость NSET.