

4.3. Реостатное и импульсное
параметрическое регулирование угловой скорости двигателя постоянного тока независимого возбуждения
Регулирование угловой скорости изменением сопротивления цепи якоря не требует особых пояснений. В гл. 3 дано построение реостатных механических харак- теристик применительно к! пуску двигателя. Подобный вид имеют характеристики и при регулировании угловой скорости посредством реостатов в цепи якоря. В отличие от пускового реостата регулировочный реостат должен быть рассчитан в соответствии с режимом работы привода, он оказывается включенным не только кратковременно во время пуска, но и во время работы двигателя с заданной угловой скоростью.
При этом способе регулирования изменяется жесткость характеристики, а с ней и стабильность угловой скорости, угловая скорость регулируется вниз от основной, причем полное использование двигателя по току достигается при регулировании с постоянным номинальным моментом, если двигатель имеет независимую вентиляцию.
Действительно, если считать, что для любой угловой скорости допустимым является номинальный ток, т. е. Iдоп=Iя,ном,а поток двигателя остается номинальным, то допустимый момент двигателя равен номинальному Мдоп=kФномIя,ном=Мном;по мере снижения угловой скорости допустимая, мощность двигателя уменьшается, так как Рдоп=Мномω. Если допустить, перепад угловой скорости в 25 % при изменении момента нагрузки на ± 25 % номинального, то диапазон регулирования составит при- мерно 2:1. Если допустить еще больший перепад угловой скорости, можно несколько расширить диапазон регули- рования. Однако следует иметь в виду, что при значитель- ном перепаде угловой скорости с изменением нагрузки наблюдается резкое снижение производительности меха- низма, позтшгу практически допустимый диапазон регу- лирования не превышает (1,5 -:- 2) : 1.
В большинстве случаев реостатное регулирование угло- вой скорости производится с помощью контакторов, замы- кающих отдельные ступени резистороа, т. е. скорость привода изменяется дискретно, поэтому данный способ при контакторном управлении не обеспечивает плавного
регулирования. Применение жидкостного (при малой мощ- ности двигателя) или ползункового реостата позволяет достигнуть плавного регулирования. Другим способом достижения плавного регулирования при введении рези- сторов в цепь якоря является использование (при неболь- шой мощности двигателя) импульсного параметрического
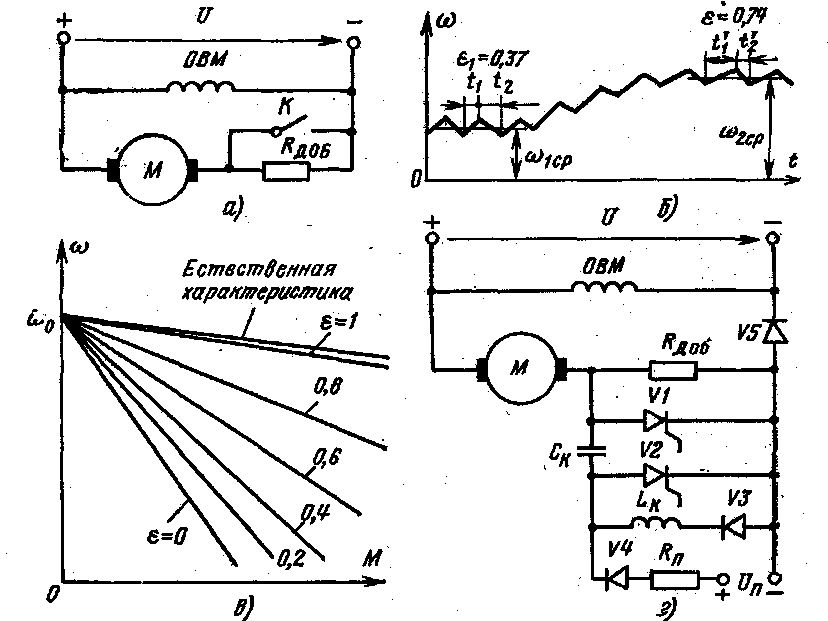
Рис. 4.6. Схема включения двигателя постоянного тока независимого возбуждения при импульсном регулировании добавочного сопротивле- ния (а), график регулирования угловой скорости при изменении скваж- ности ε замыкания контакта К (б), механические характеристики при импульсном регулировании сопротивления (в), схема тиристорного ключа (г).
регулирования угловой скорости, применяемого также в автоматизированном электроприводе для стабилизации (поддержания) заданного значения угловой скорости при изменении момента нагрузки или для предварительного снижения скорости перед остановкой привода.
Схема включения двигателя постоянного тока незави- симого возбуждения при импульсном регулировании доба- вочного сопротивления в цепи якоря приведена на рис. 4.6,а. Добавочный резистор Rдоб, включаемый в цепь якоря, либо полностью вводится в схему, либо замыкается нако-
ротко ключом К. Коммутация ключа К осуществляется периодически. При замкнутом накоротко Rдоб ток в цепи якоря и угловая скорость двигателя возрастают, а при введении Rдоб в цепь, когда ключ К разомкнут, ток и угло- вая скорость снижаются. Колебания тока и угловой ско- рости происходят около некоторого среднего значения (рис. 4.6, б). Среднее значение тока определяется моментом нагрузки на валу двигателя, а среднее значение угловой скорости зависит от соотношения длительностей замкнутого и разомкнутого состояния ключа К и от момента нагрузки. Амплитуды колебаний тока и угловой скорости зависят при данных параметрах привода от частоты коммутации ключа К, которая должна быть достаточно высокой. Соот- ношение длительностей t1 замкнутого и t2 разомкнутого состояний ключа К принято выражать в виде относительной величины
![]()
и
механические характеристики двигателя,
показанные
на
рис. 4.6, в,
определяются формулой (для средних
зна-
чений
угловой скорости и момента)
![]()
![]()
т. е. характеристики имеют тот же вид и те же свойства, что и при чисто реостатном регулировании угловой ско- рости.
Для реализации импульсного способа регулирования сопротивления (следовательно, и угловой скорости) при- меняются бесконтактные ключи, выполненные на базе транзисторов (при токах до 15—20 А) или тиристоров (при токах до 100—150 А).
На рис. 4.6, г показана схема тиристорного ключа. Роль ключа выполняет тиристор VI, шунтирующий резистор Rдоб при подаче на него управляющего импульса. Выключается тиристор VI с помощью вспомогательного тиристора V2, подключающего к тиристору VI коммутирующий конден- сатор Ск, предварительно заряженный через тиристор V4 и резистор Rп от маломощног.о источника Un. Выключение тиристора V2 происходит по окончании перезаряда кон- денсатора Ск от напряжения цепи якоря (падение напря- жения на Rдоб при включенном тиристоре VI). При оче- редном включении тиристора VI обратный колебательный перезаряд конденсатора Ск осуществляется через VI, диод V3 и реактор LK. Более подробные сведения об этом способе регулирования можно найти в [19].
При регулировании угловой скорости введением рези- сторов в цепь якоря двигателя постоянного тока потери мощности в этой цепи изменяются пропорционально пере- паду угловой скорости. Это видно из следующих энергети- ческих соотношений:
для двигателя постоянного тока потребляемая мощ- ность в цепи якоря определяется равенством
![]()
Последнее уравнение может быть переписано так:
![]()
![]()
![]()
![]()
(4.1)
где
Таким образом, потери мощности в этой цепи пропор- циональны потребляемой мощности и перепаду угловой скорости, выраженному в относительных единицах. Так, если момент нагрузки постоянен (следовательно, постоянна потребляемая мощность) и угловая скорость двигателя уменьшается вдвое, то примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. данные способы регулирования (реостатный и импульсный параметрический) являются неэкономичными. При импульсном регулировании сопро-
тивления энергетические показатели несколько хуже, чем при ступенчатом его изменении. Это обусловлено наличием в кривой тока якоря переменной составляющей, вызванной коммутациями ключа, что, приводит к увеличению потерь энергии.
Средний КПД при Мс= const в предположении ра- боты привода с одинаковой длительностью на каждой ступени угловой скорости определяется по формуле
![]() (4.2)
(4.2)
где D=ωе/ωmin; ωе, ωmin — угловая скорость на есте- ственной и регулировочной характеристиках; ηе— КПД привода на естественной характеристикD = <ве/ют,-„; сое, ыт1п е.
Некоторые особенности в отношении энергетических показателей1 имеет регулирование угловой скорости при- водов с вентиляторным моментом. Момент, развиваемый двигателем при вентиляторной нагрузке, пропорционален квадрату скорости, т. е. М = С ω2 (потери в вентиляторе не учитываются). Потребляемая двигателем мощность'
![]()
![]()
где Р1ном — мощность, потребляемая при номинальной нагрузке; Р2ном — номинальная мощность двигателя (мощ- ность на валу); ω0- угловая скорость идеального холо- стого хода; ωном — номинальная угловая скорость. Мощность на валу двигателя
![]()
![]()
Потери мощности в цепи якоря двигателя1
![]() (4.4)
(4.4)
Взяв первую производную d (ΔР2) /dω и.приравняв ее
нулю, найдем угловую скорость ω= 2/3ω0. при которой 1 Здеев не учитываются потери в cтали и механические потери.
потери
в цепи якоря достигают максимума:
 (4.5)
(4.5)
Коэффициент полезного действия привода при реостат- ном регулировании и вентиляторном моменте ориентиро- вочно может быть определен по той же формуле, что и КПД при Mc = const, т. е.
![]() (4.6)
(4.6)
Соответственно и среднее значение КПД за цикл опре- деляется по (4.2). Однако, несмотря на то что КПД при- вода при Мс = const и Мс = Сω2 одинаковы, регулиро- вание угловой скорости введением резисторов в цепь якоря для механизмов с вентиляторным моментом нагрузки связано со значительно меньшими потерями мощности, чем для механизмов с неизменным нагрузочным моментом.
|
Таблица 4.1 Угловая Мощность Потребляемая Потери в скооость% вентилятора, мощность двига- цепи якоря, КПД % теля, % % 100 100 105,2 5,2 0,95 90 72,9 85,3 12,4 0,855 80 51,2 67,4 16,2 0,76 70 . 34,3 51,6 .17,3 . 0,665 60 21,6 37,9 16,3 0,57 50 12,5 26,3 13,8 0,475 40 6,4 16,8 10,4 0,38 30 2,7 9,5 6,8 0,285 20 0,8 4,2 3,4 0,19 10 0,1 1,05 0,95 0,095 0 0 0 0 0 |
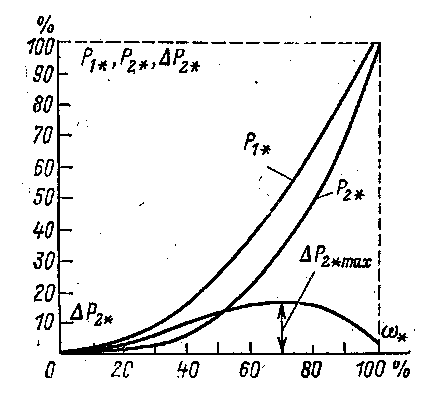
Если, например, относительный перепад угловой ско- рости при номинальной нагрузке Δω*ном = 0,05, то по- тери мощности, отнесенные к номинальной мощности, и КПД привода характеризуются цифрами, приведенными в табл. 4.1.
По данным табл. 4.1 на рис. 4.7 построены зависи- мости Р1*, Р2* ΔР2* от ω*
Несмотря на значительно меньшие потери мощности, которые дает регулирование угловой скорости измене-
нием сопротивления при вентиляторном моменте, нельзя, однако, признать этот способ достаточно экономичным, особенно в тех случаях, когда вен- тиляторы могут работать длительно при угловых
Рис. 4.7. Кривые зависимости
P1*. Р2* и Δ Р2* от угловой
. скорости (в относительных еди- ницах).
скоростях, меньших номинальной, поэтому приходится искать более экономичные способы регулирования угло- вой скорости.